
░Ė└²ę╗Ż║ĘNų▓─ó╣Į
│╠ą“šf├„Ż║
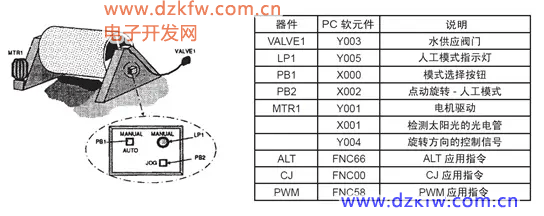
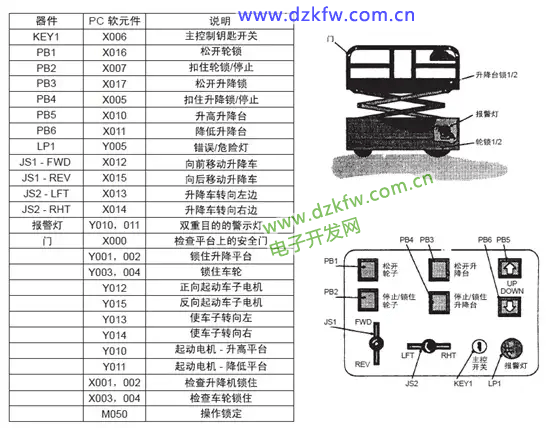
š¹éĆ└²ūė╗∙ė┌ę╗éĆ║åå╬Ą─╬’└ĒęÄätŻ║ę╗éĆį¬Ą─ų▒ÅĮąĪė┌łAų▄ķLĪŻę“┤╦ķ_░lę╗ĘNÖCŲ„Ż¼╦¹─▄░╔─ó╣ĮĘNų▓į┌ę╗éĆłAų∙¾wĄ─łAų▄╔ŽŻ¼▀@śėĘNų▓Ą─Ūf╝┌┤¾╝s3▒Čė┌ÖCŲ„╦∙«a╔·Ą─┴┐ĪŻ
▀@└’ėąę╗éĆå¢Ņ}ąĶę¬┐╦Ę■Ż¼╚ń╣¹ų▓╬’čžę╗éĆłAų∙¾wĘNų▓Ż¼─Ūą®▓╗į┌łAų∙¾wĒö▓┐Ą─Ż¼▓╗į┌╠½Ļ¢ų▒╔õŽ┬Ą─ų▓╬’Ż¼╦³éāĄ─╔·ķL╦┘Č╚Ģ■┬²ę╗ą®Ż¼═¼ĢrĢ■┴”łDĮėĮ³╣Ōį┤ĪŻ╦∙ęįŻ¼─ó╣Į┐╔─▄Ģ■Ī«ÅØŪ·Ī»╗“Ī░ĮgĮYĪ░ĪŻ┴Ēę╗ĘN┐╔─▄╩ŪŻ║łAų∙¾wŽ┬▓┐Ą──ó╣ĮĢ■═Ļ╚½▓╗╔·ķLĪŻ
ĮŌøQĘĮĘ©╩Ūą²▐D▀@éĆłAų∙¾wĪŻę“┤╦Ż¼ķ_░l┴╦Ž┬├µĄ─│╠ą“Ż¼┐╔ęį├┐ąĪĢrĖ─ūāą²▐DĘĮŽ“Ż¼▀@śėŠ═─▄«a╔·│²ų▒Č°ĮĪ┐ĄĄ──ó╣Į┴╦ĪŻ┴Ē═ŌŻ¼├┐ąĪĢrā╚ę╗éĆęÄČ©ĢrķgųąŻ¼ī”ą²▐DłAų∙¾w└’├µØ▓╦«ĪŻ
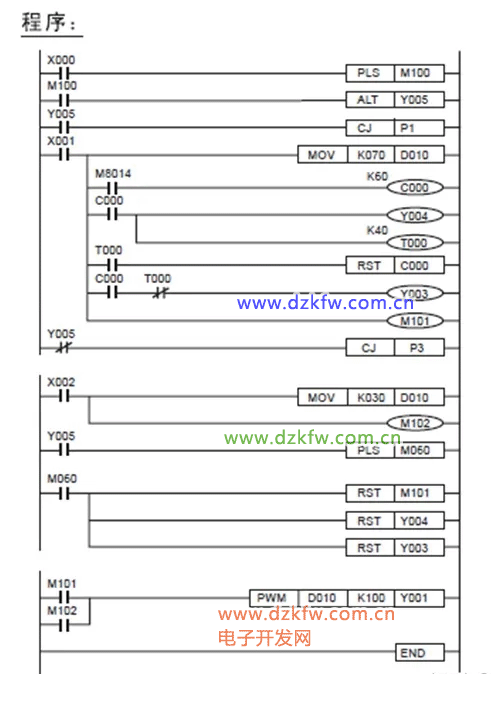
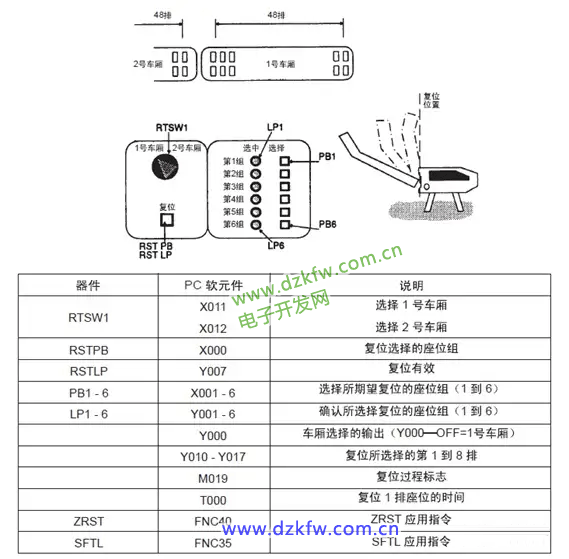
ūŅ║¾ę╗éĆų„ę¬└¦ļyĢrÖCŲ„▒žĒÜ─▄ŪąōQĄĮ╚╦╣ż─Ż╩ĮŻ¼╩╣Ė¹ĘNš▀łį│ų║═╩šĖŅ╔·ķLĄ─Ūf╝┌ĪŻę╗éĆ░┤ŌoĮ╗╠µŪąōQūįäė╚╦╣ż─Ż╩ĮŻ©PB1Ż®Ż¼į┌╚╦╣ż─Ż╩ĮŽ┬Ż¼¤¶LP1┴┴Ż¼▓┘ū„š▀┐╔ęį░┤³cäė┐žųŲ░┤ŌoŻ¼╩╣łAų∙¾wą²▐DĪŻ
Å─ŠÄ│╠ĮŪČ╚üĒ┐┤Ż¼╩╣ė├Śl╝■╠°▐Dī”├┐éĆŽÓĻP▓┐Ęųū„╠°▐D┐žųŲĄ─ĘĮĘ©╩╣ĘŪ│ŻīŹė├Ą─ĪŻūŅ║¾▓┐ĘųĄ─ęįP3ųĖßśś╦ėøĄ─│╠ą“ė├ė┌╚╦╣ż║═ūįäė─Ż╩ĮŻ¼ūįäė─Ż╩Į╠°ĄĮųĖßśP3Ż¼Č°╚╦╣ż─Ż╩ĮĢrŻ¼░č╦³ū┐éźę╗░ŃĒśą“Ą─│╠ą“╠Ä└ĒĪŻ
░Ė└²Č■Ż║╔ŽŽ┬ęŲäė
Å─▓┴┤░Ą§▄ć│╠ą“▀xō±Ą─š▀▓┐Ęų│╠ą“┐žųŲĄ§▄ćį┌Į©ų■├µ╔Ž┤╣ų▒▀\äėŻ¼▒M╣▄▀@ų╗╩Ūę╗éĆ┤¾ą═│╠ą“Ą─ę╗ąĪ▓┐ĘųŻ¼Ą½╦³╚įėąįSČÓėąęŌ┴xĄ─ŠÄ│╠ę¬³cĪŻ

│╠ą“šf├„Ż║
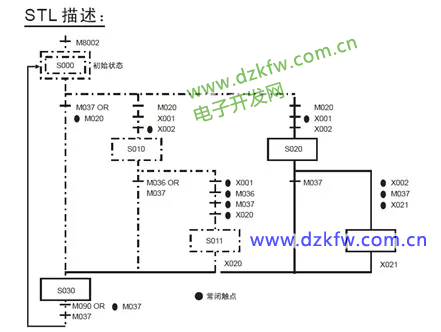
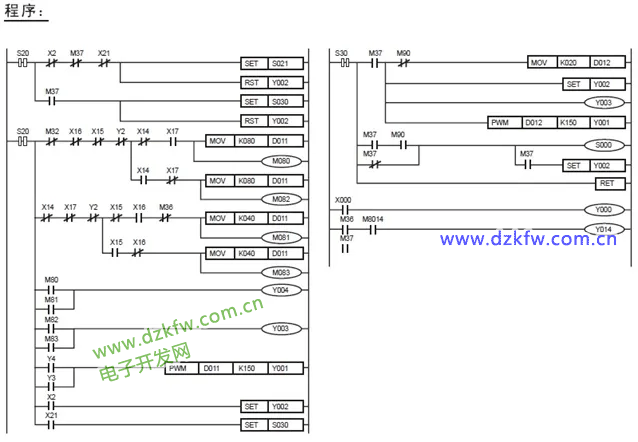
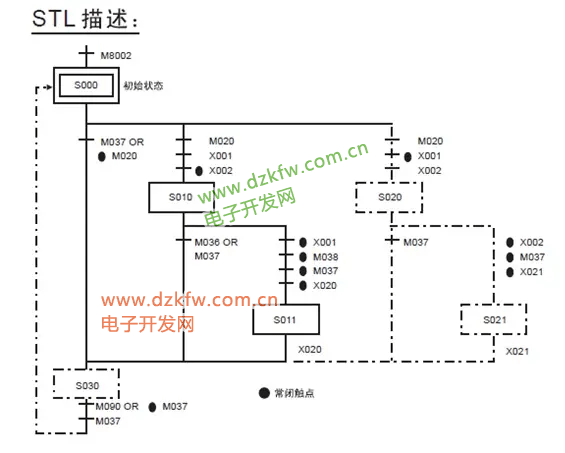
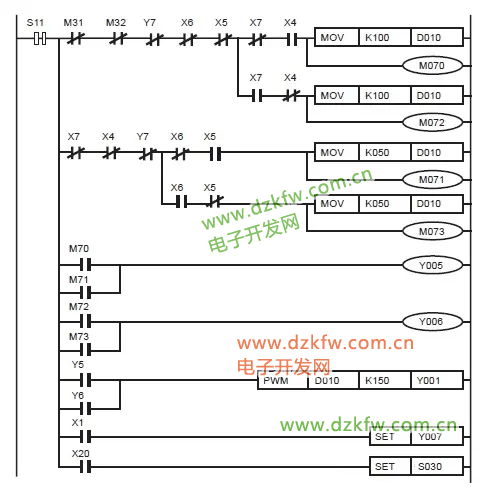
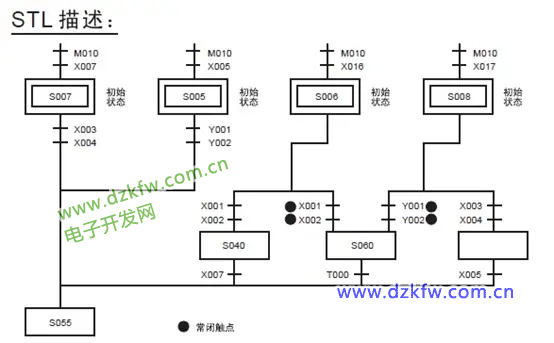
┐╔ęįūóęŌĄĮ▒Š│╠ą“╩Ūęį╠▌ą╬łD╗“STLą╬╩ĮŠÄīæĄ─Ż¼▀@ī”ė┌Ž┬├µę¬ųvĄ─ā╔³cüĒšfĢrĘŪ│Żųžę¬Ą─ĪŻ╚ń╣¹čąŠ┐STL▓ĮS20║═S30Ą─ā╚╚▌Ż¼┐╔┐┤ĄĮ╦³éāČ╝░³║¼Y3▌ö│÷Ż¼į┌ś╦£╩ŠÄ│╠╝╝ągųąŻ¼▀@Įąū÷ļpŠĆ╚”▌ö│÷Ż¼╩ŪĮ^ī”▓╗į╩įSĄ─ĪŻį┌š²│ŻŠÄ│╠ųąŻ¼╚ń╣¹ę╗┤╬│÷¼FĄ─▌ö│÷Y3Įė═©Ż¼Č°į┌═¼ę╗┤╬Æ▀├ĶųąĄ┌Č■┤╬│÷¼FĢrÅ═╬╗┤╦▌ö│÷Ż¼Å─Č°ī¦ų┬ę╗ĘN║▄╬ŻļUĄ─ŪķørĪŻ▓╗▀^Ż¼ę“×ķSTLŠÄ│╠├┐ę╗éĆSTL▓ĮĄ─│╠ą“ŽÓī”¬Ü┴óŻ¼▌ö│÷ŠĆ╚”į┌įSČÓSTLēKųąĄ─╩╣ė├╩Ū║▄░▓╚½Ą─Ż¼Å─Č°╩╣ŠÄ│╠Ė³║åå╬ĪŻ
ųĄĄ├ūóęŌĄ─Ą┌Č■³cīŹļH╔Žę▓╩Ū│÷ė┌┼cĄ┌ę╗³c═¼śėĄ─įŁę“ĪŻÖz▓ķSTL▓ĮS21║═S30Ż¼┐╔ūóęŌĄĮīŹļH╔Ž┤µį┌2éĆPWMųĖ┴ŅŻ¼╚ń╣¹▓ķ┐┤ŠÄ│╠╩ųāįŻ¼┐╔ų¬├┐ę╗éĆ│╠ą“ų╗─▄╩╣ė├ę╗┤╬PWMųĖ┴ŅĪŻSTL▓ĮĖ∙ō■Ųõūį╔Ē╠žąįīŹļH╔Ž╩ąę╗éĆ│╠ą“Ż¼╦∙ęįĪ░├┐│╠ą“ę╗éĆPWMĪ░ęÄätīŹļH╔Ž╚įø]▒╗ŲŲē─ĪŻ
▒Š│╠ą“šZą“Ą§▄ćį┌š²│ŻĢręįā╔ĘN▓╗═¼╦┘Č╚╔²Ė▀╗“ĮĄĄ═Ż¼╚ń╣¹’L╦┘│¼▀^ę╗Č©Ž▐ųĄŻ¼Ą§▄ćĢ■▒╗Ž▐ųŲį┌Ą═╦┘▀\ąąŻ¼╚ń╣¹’L┴”▀^ÅŖŻ¼Ą§▄ćĢ■ūįäėęįĪ░┼└ąąĪ░╦┘Č╚ĮĄĄĮĄž├µĪŻė├ęį▒Ē╩Š’L╦┘ūā╗»Ą─ś╦ųŠ╩ŪŻ║M32,M36,║═M37ĪŻ
░Ė└²╚²Ż║ū¾ėęęŲäė
Ž┬├µĄ─│╠ą“╩Ū┐žųŲę╗éĆ▓┴┤░Ų„Ą─┤¾ą═│╠ą“Ą─ę╗ąĪ▓┐ĘųŻ¼▒Š│╠ą“┐žųŲį┌ę╗éĆĮ©ų■├µ╔ŽĄ─ū¾ėę▐DŽ“ĪŻ
│╠ą“šf├„
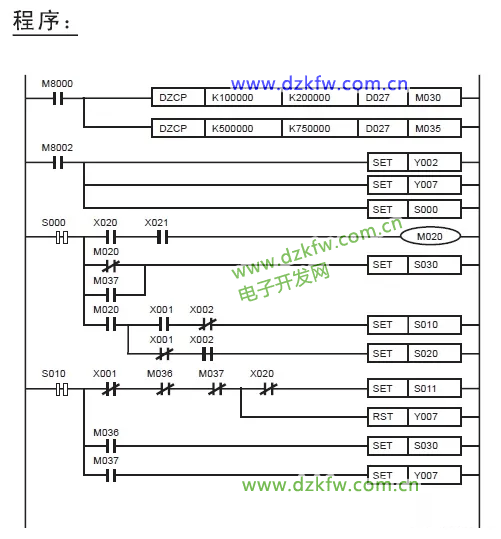
▒Š│╠ą“ų╗╩Ūę╗éĆ┤¾│╠ą“Ą─ę╗ąĪ▓┐ĘųŻ¼▓╗▀^╦³╚įėąę╗ą®ųĄĄ├ūóęŌĄ─╠žäeų«╠ÄĪŻī”ę╗éĆ▓┴┤░▄ćĄ─┐žųŲš▀üĒšfŻ¼ūŅ┤¾Ą─╬ŻļUų«ę╗╩Ū’LŻ¼▀@éĆė░Ēæį┌▒Š└²│╠ą“ųąęč┐╝æ]ĄĮĪŻūŅ│§Ą─▓ĮÖz£y┤µį┌öĄō■╝─┤µŲ„D027ųąĄ─ųĄŻ¼╩┬īŹ╔Ž╩ŪÖz£y’L╦┘╩Ūʱį┌░▓╚½ĘČć·ā╚ĪŻę¬ūóęŌĄ─╩Ū▀@└’ų╗ėą2éĆZCPųĖ┴ŅŻ¼╚╗Č°╦³éā░³║¼┴╦5éĆ’L╦┘ĘČć·Ż¼▀@═©▀^Öz£y2éĆZCPųĖ┴Ņų«ķgĄ─ĘČć·üĒīŹ¼FĪŻ
ŲõĮY╣¹╩ŪŻ¼╚ń╣¹’L┴”╔įÅŖŻ¼ät╦«ŲĮ╦┘Č╚Ž▐Č©×ķę╗éĆ▌^Ą═Ą─ųĄŻ╗╚ń╣¹’L┴”▀^ÅŖŻ¼ät╦∙ėą╦«ŲĮ▀\äėČ╝═Żų╣Ż¼▓óĮo│÷Š»ł¾ą┼╠¢ĪŻ┴Ēę╗ūóęŌ³c╩Ūį┌STL▓ĮS10Ą─Ą┌ę╗ąąŻ¼┐╔┐┤ĄĮS11╩Ūį┌X20öÓķ_Ģr▓┼▒╗ų├╬╗Ż¼▀@╩Ū║▄ųžę¬Ą─Ż¼ę“×ķX20ė├ė┌Öz£y▌ö│÷X7╦∙┐žųŲĄ─äx▄ćĄ─╬╗ų├ĪŻ
īóę¬░l╔·Ą─╩Ū│╠ą“īóį╩įSī”ęč═Ļ╚½═Ļ│╔Ą─▌ö│÷Y7ū÷Å═╬╗▓┘ū„Ż¼╝┤į┌│╠ą“└^└mų«Ū░X20▒╗äh│²ĪŻī”ę╗éĆŠÄ│╠š▀üĒšfŻ¼║▄╚▌ęūĘĖ║åå╬ĄžšfĪ░╬ęęčū÷┴╦Ī▒Ą─Õeš`Ż¼ę“×ķ╦∙Ų┌═¹Ą─äėū„▒╗┐žųŲ┴╦ę╗Č╬ĢrķgŻ¼Č°▀@Č╬Ģrķgī”ė┌═Ļ╚½═Ļ│╔▓┘ū„üĒšf┐╔─▄╠½Č╠┴╦ĪŻ
░Ė└²╦─Ż║▒O£y’LŽ“
ė├┐╔ŠÄ│╠┐žųŲŲ„║▄╚▌ęūū÷╗∙▒ŠĄ─Öz£y║═ėŗ╦ŃŻ¼▀@ŅÉæ¬ė├ųąĄ─ę╗└²╩ŪąĪą═ÜŌŽ¾šŠŻ¼▀@ī”ė┌Ė▀īė▐k╣½╩ęĄ─┤░æ¶ŪÕØŹ╩ŪśOŲõųžę¬Ą─Ż¼╦³┐╔ęįė├üĒ┼ąöÓ’L╩Ūʱ┤¾ĄĮėą╬ŻļUĄ─│╠Č╚ĪŻ
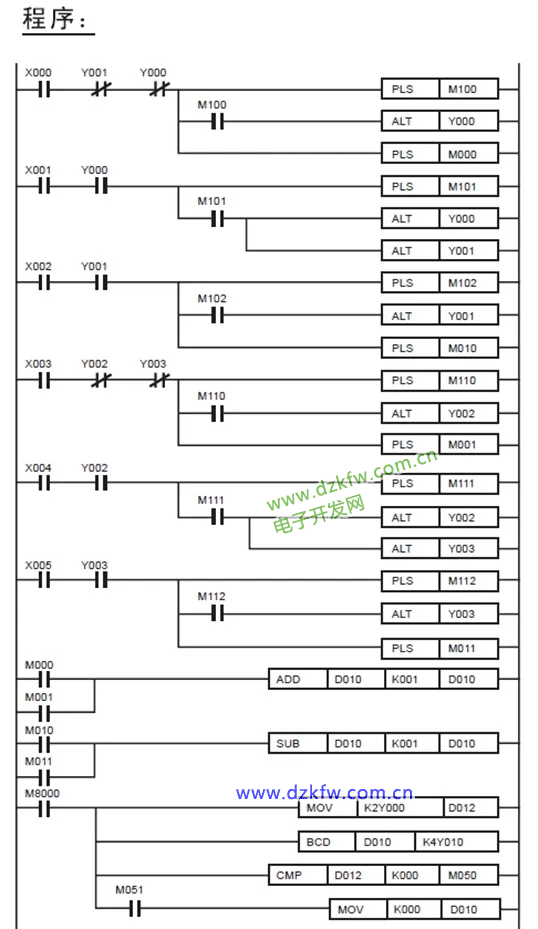
│╠ą“šf├„Ż║
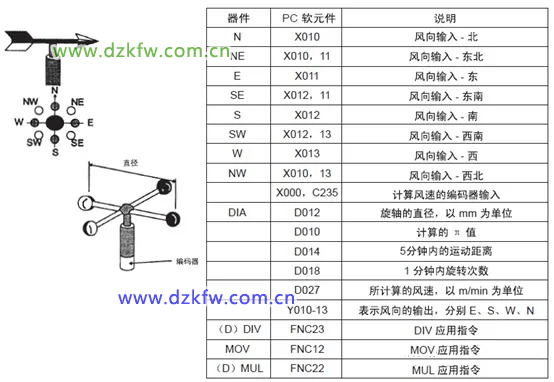
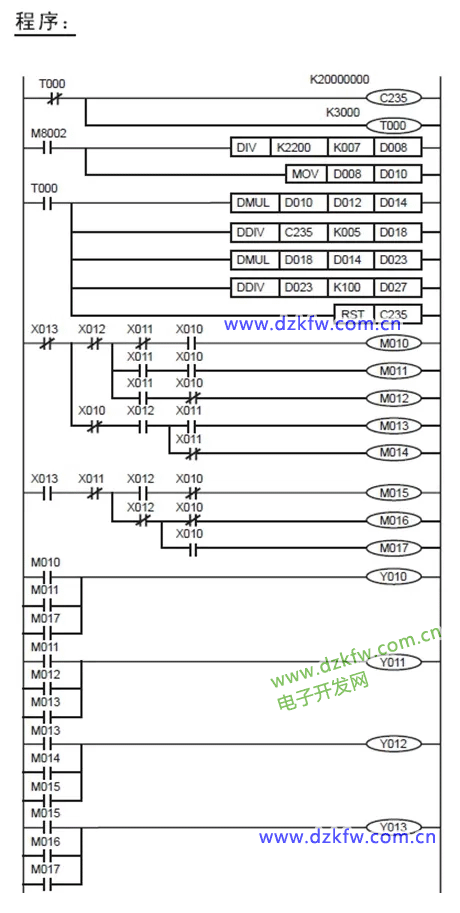
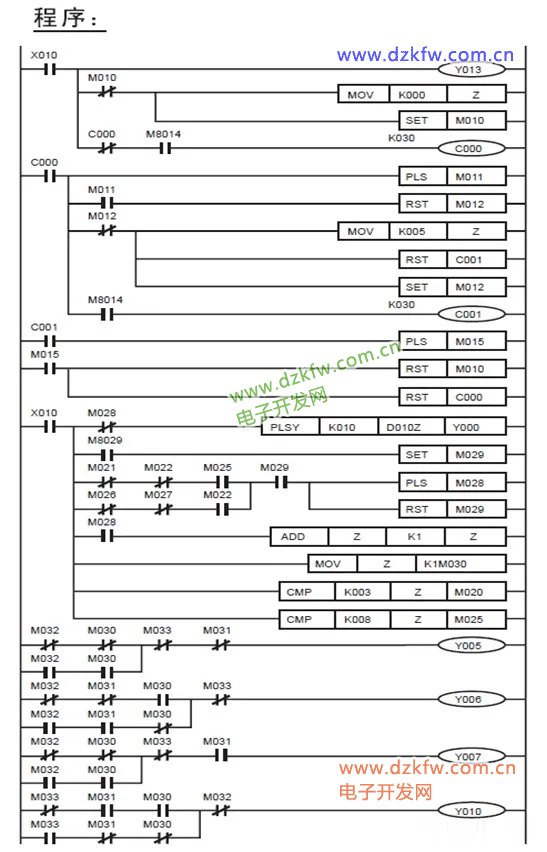
▒Š└²│╠ą“░³└©ā╔éĆ╣”─▄Ż¼╦³ėŗ╦ŃŽÓī”’L╦┘Ż¼▓óųĖ│÷’LŽ“ĪŻ’LŽ“ś╦╩Ū└Ž╩ĮĄ─ÖCąĄĮYśŗŻ¼Ą½ŲõöĄō■▒╗ļŖūė┤µā”║═┐žųŲĪŻ╩ūŽ╚┐┤£y’L╦┘╣”─▄Ż¼’L╦┘├┐5ĘųńŖėŗ╦Ńę╗┤╬Ż¼▀@ė╔Č©ĢrŲ„T000┐žųŲŻ¼▀@ĘNėŗ╦ŃĘĮĘ©─▄Įo│÷ę╗éĆ▌^║├Ą─ŲĮŠ∙’L╦┘Ż¼Ą½╩Ū╦³▓╗─▄ł¾ĖµĻć’LĄ─╦┘Č╚ĪŻ
ė╔’L“īäėĄ─ą²▌Sų▒ÅĮ▒žĒÜ▌ö╚ļĄĮöĄō■╝─┤µŲ„D12ųąŻ¼╦³æ¬ęįmm×ķå╬╬╗▌ö╚ļŻ¼╝┤0.1m=100mmŻ║▌ö╚ļ100ų┴D12.ą²▌SĄ─ą²▐D┤╬öĄė╔Ė▀╦┘ėŗöĄŲ„C235üĒėŗöĄŻ¼öĄō■▌ö╚ļė╔X000▌ö╚ļĪŻ
Ž╚ėŗ╦Ńą²▌S▀\äė▄ē█EłAĄ─łAų▄ķLŻ¼į┘│╦ęįą²▐D┤╬öĄŻ¼Š═ėŗ╦Ń│÷Įø▀^Ą─ŠÓļxĪŻę“×ķ▀\ąąĢrķg╣╠Č©×ķ5ĘųńŖŻ¼┤░Ė│²ęį5Ż¼Š═Ą├ĄĮę╗éĆ├┐ĘųńŖ¶~Č┤ŠÓļxĄ─┤░ĖĪŻ
×ķ┴╦Ą├ĄĮĖ³Ė▀Š½Č╚Ż¼▒Š└²Ą─ėŗ╦Ńųą╝ė╚ļ┴╦▒╚└²┐sĘ┼ĒŚĪŻūŅ║¾┤░Ėæ¬įō│²ęį10³Ż¼Å─Č°Ą├ĄĮ├ū/ĘųńŖ×ķå╬╬╗Ą─’L╦┘ĪŻī”ė┌ę╗éĆ200mmų▒ÅĮĄ─ą²▌SŻ¼┐╔ęį£y┴┐ėŗ╦Ń0.628ĄĮ10Ż¼000m/minĄ─’L╦┘ĪŻ
│╠ą“Ą┌Č■▓┐Ęų░³└©’LŽ“Ą─Öz£yĪŻ╩╣ė├8éĆÖz£yŲ„Ż¼Č°ų╗ėą4éĆ▌ö╚ļŻ¼Öz£yŲ„į┌š²Ž“ųĖŽ“ų«ķgĄ─╬╗ų├Ģr┼c2éĆ▌ö╚ļ▀BĮėĪŻę╗ą®ŠÄ│╠š▀Ģ■šfŻ¼ė├ęįųĖ╩Š’LŽ“Ą─╦─éĆ▌ö│÷¤¶Ą─▀ē▌ŗ▓ó▓Įųžę¬ĪŻĄ½ŲõīŹ▀@╩Ūę╗éĆ║├ų„ęŌŻ║┐╔ė├╦¹éā▀Mąą░▓╚½Öz£yĪó│╠ą“╗źµiĪóÅ─Č°Ę└ų╣ęŌ═ŌĢrķgĄ─░l╔·ĪŻį┌─│ą®ŪķørŽ┬Ż¼ī”Ž¾▓╗╩Ū╔·╬’╗“╬ŻļUĄ─ÖCŲ„Ż¼ät┐╔ęįūįąą╠Ä└ĒŻ¼Ą½╩ŪŠÄ│╠š▀▓╗æ¬įō┼c░▓╚½▀Mąą┘Ć▓®ĪŻ▒Š└²ųąŻ¼│╠ą“▀MąąÖz£yęįŅAĘ└’L╣╬ŲĄ─└¼╗°║═Žļį┌’LŽ“ś╦╔ŽŚ½ŽóĄ─°BĪŻ
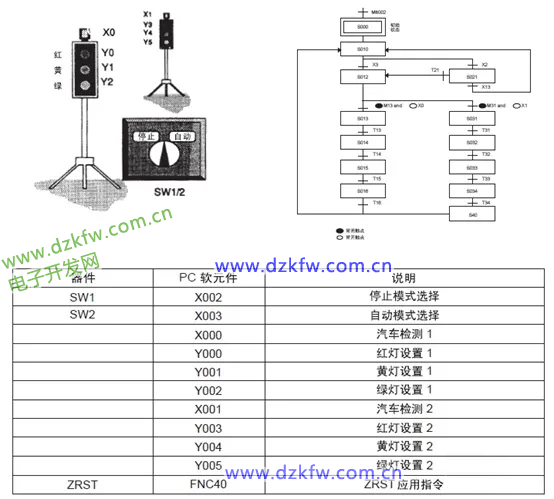
░Ė└²╬ÕŻ║Å═╬╗╗ž╦«ŲĮ╬╗ų├
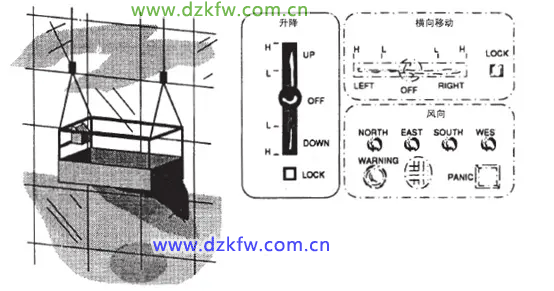
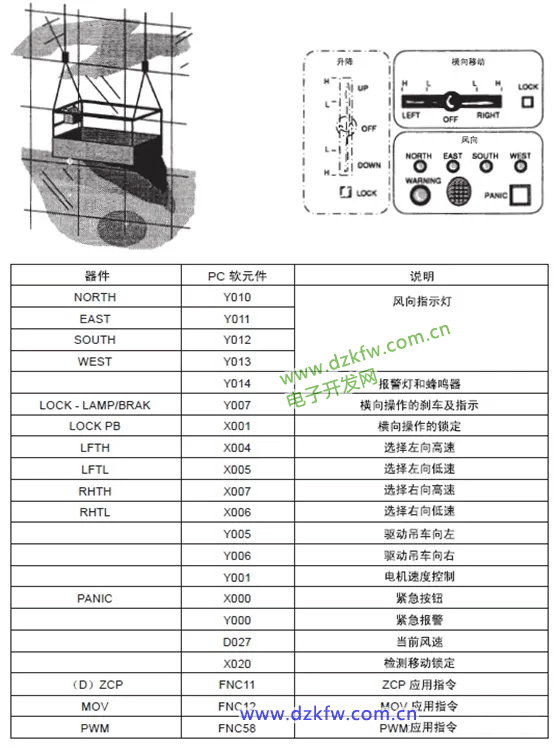
į┌ŅÖ┐═└¹ęµ╚šęµį÷ÅŖĄ─«öĮ±¼F┤·╩└Įń└’Ż¼┐╔ęį┐┤ĄĮ║▄ČÓķL═ŠŲ¹▄ćĪó╣½╣▓Ų¹▄ćĪóļŖ▄ć╣½╦Šš²╠ß╣®ĮoŅÖ┐═Ė³║├Ą─ū∙ę╬įOéõŻ¼ŲõųąĄ─ę╗ĘNĢr┐╔š{š¹┐┐▒│Ą─ū∙ę╬ĪŻ
│╠ą“šf├„Ż║
š²╚ń╔Ž├µ╦∙╠ߥĮĄ─Ż¼┤¾┴┐╣½╦Šš²į┌╠ß╣®▀@ą®ū∙╬╗Ą─ĖĮ╝ėā׳cŻ¼ŲõųąįSČÓ╣½╦ŠŻ¼į┌├┐┤╬┬├ė╬ķ_╩╝ĢrŻ¼īóū∙╬╗Å═╬╗ĄĮ┤╣ų▒╬╗ų├Ż¼▀@Ģ■╩╣═Ōė^š¹²Rėąą“ĪŻė├╩ųÅ═╬╗╦∙ėąĄ─ę╬ūėŻ¼ąĶ┘M║▄ČÓĄ─ĢrķgŻ¼▒Š╣ØĮo│÷Ą─└²ūėė├ęįÅ═╬╗ā╔╣ØŽÓÓÅ▄ćĹĄ─ū∙╬╗ĪŻ▓┘ū„╚╦åT╩╣ė├ā╔╬╗ą²▐Dķ_ĻPŻ©RTSW1Ż®▀xō±ę¬Å═╬╗ū∙╬╗Ą─▄ćĹŻ¼▀xō±ę¬Å═╬╗Ą─ū∙╬╗ĮMŻ¼Ūę╚╬║╬ę╗éĆĢrķgų╗─▄▀xųąę╗éĆĮMŻ¼▀xō±Ą─ū∙╬╗ĮMė├Įė═©ŽÓæ¬Ą─¤¶▒Ē╩ŠŻ¼Įėų°Å═╬╗░┤ŌoķWĀqŻ¼Ą╚┤²▒╗░┤Ž┬ĪŻĮėŽ┬üĒķ_╩╝ū∙╬╗Å═╬╗▓┘ū„Ż¼▀@éĆ┤ņš█│ų└mę╗Č╬ŅAČ©ĢrķgŻ¼Č°▓╗Öz▓ķ╩ŪʱČ╝ęčÅ═╬╗ĪŻ╚ń╣¹┬├┐═ē¶Č╝╚įį┌ū∙╬╗╔ŽČ°▀Mąąįō▓┘ū„Ż¼▀@śėū÷Ģ■Ė³░▓╚½ą®ĪŻ┬├┐═▓╗Ģ■Å─╬╗ūė╔ŽÅŚ│÷Ż¼Č°╩Ū├┐ėX▓┴ėą╔Ž├µ╩┬░l╔·Ż¼▀@╩Ūę“×ķÅŚ╗╔┴”ę╗░Ń▓╗Ģ■┤¾ĄĮūŃęįÅŚŲę╬▒│║═┬├┐═¾wųžĄ─┐éųž┴┐ĪŻ
░Ė└²┴∙Ż║ėą║¶▒žæ¬Ą─╩╠š▀
į┌║▄ČÓŖ╩śĘł÷╦∙Ż¼▒╚╚ń┬├^Ż¼¾wė²^Ą╚Ż¼░┤Ōo║═ŌÅīó║▄┐ņ│╔×ķ│ŻęŖĄ─¢|╬„┴╦ĪŻ«ö╠ß╣®Ą─įOéõ▒╗░┤Ż¼Ū├╗“└ŁĢrŻ¼║▄ļyų¬Ą└╩Ūʱėą╚╦┬ĀĄĮ▀@┤╬║¶ĮąŻ¼Ž┬├µ╩╣ė├┐žųŲŲ„╝╝ągĘĮ░Ė─▄ĮŌøQ▀@éĆå¢Ņ}ĪŻ
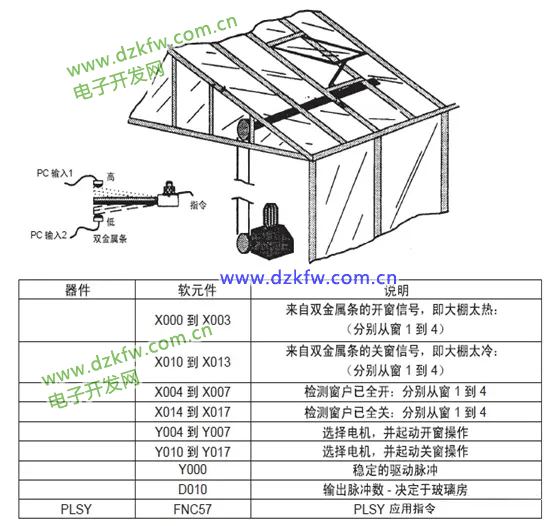
│╠ą“šf├„Ż║
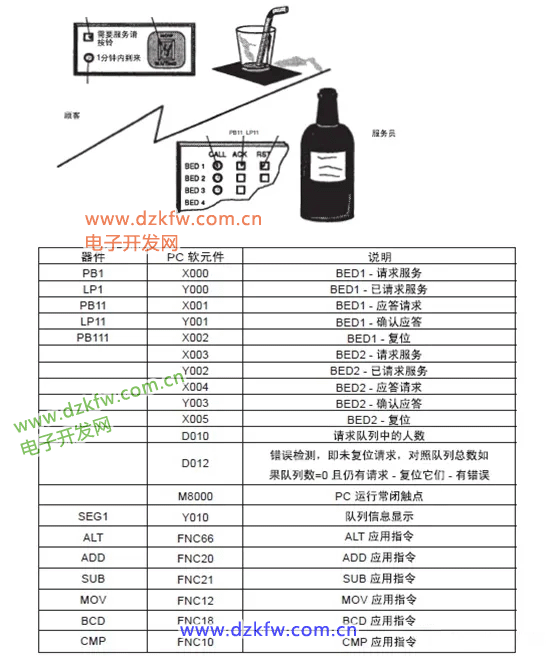
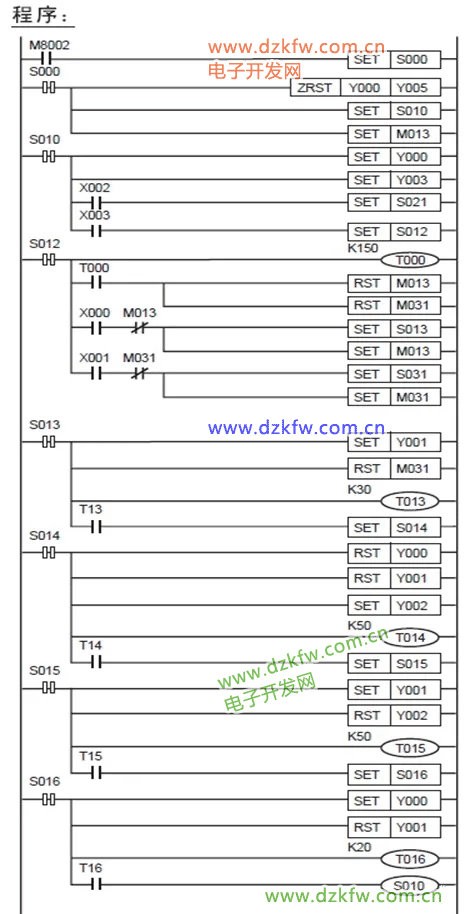
▒Š└²┐╔ęį│╔×ķ▀h│╠ŅÖ┐═║═Ę■äšåTķgĄ─ą┼Žóé„╦═ŽĄĮyŻ¼PCū┐éźš{Č╚║═é„╦═Ų„ĪŻ▀h│╠ŅÖ┐═ę¬Ū¾─│ĘNĘ■䚯¼═©▀^ę╗éĆ▌ö╚ļŻ©╚ńŻ║X000Ż®ĮoĘ■äšåT░lą┼╠¢Ż¼▀@éĆ▌ö╚ļ“īäėę╗éĆą┼╠¢¤¶Ż¼¤¶Ė▀╦┘ŅÖ┐═║═Ę■äšåTęčĮø░l│÷ę╗éĆšłŪ¾ĪŻĘ■äšåTų¬Ą└šłŪ¾üĒė┌──└’Ż¼ę“×ķė├ęįĮė═©ą┼╠¢¤¶Ą─▌ö│÷ī”æ¬ė┌ę╗éĆ╬╗ų├Ż©╚ńŻ║Y000Ż®ĪŻ«öĘ■äšåTūóęŌĄĮ▀@éĆšłŪ¾Ż¼ę╗éĆæ¬┤ą┼╠¢╦═╗žų┴ŅÖ┐═Ż©╚ńX001Ż¼Y001Ż®Ż¼ŅÖ┐═Š═─▄┤_ą┼Ę■äšåTęč╩šĄĮšłŪ¾Ż¼Ę■äšåTę▓Ģ■ų¬Ą└──╬╗ŅÖ┐═š²į┌šłŪ¾ĪŻ«öĘ■äšåTØMūŃ┴╦ŅÖ┐═ę¬Ū¾ĢrŻ¼Å═╬╗æ¬┤ą┼╠¢Ż©╚ńX002Ż®ĪŻ┤╦▀^│╠┐╔×ķŽ┬ę╗éĆŅÖ┐═╦∙ųžÅ═Ż©╚ńŻ║X003-005,Y002-003Ż®ĪŻ╦∙ęįŻ¼«öŪ░Ą╚┤²ŅÖ┐═─▄ų¬Ą└▌åĄĮ╦¹éāĄ├╗©ČÓ╔┘ĢrķgŻ¼ę╗éĆ7Č╬’@╩Š▒Ē╩Š¼Fį┌┼┼ĻĀĄ├ŅÖ┐═öĄĪŻ▒Š└²ų╗┴ą│÷ā╔éĆ║¶Įą┼_Ż¼«ö╚╗▀Ć┐╔ęįį÷╝ėĪŻ
░Ė└²Ų▀Ż║▒Ż£ž
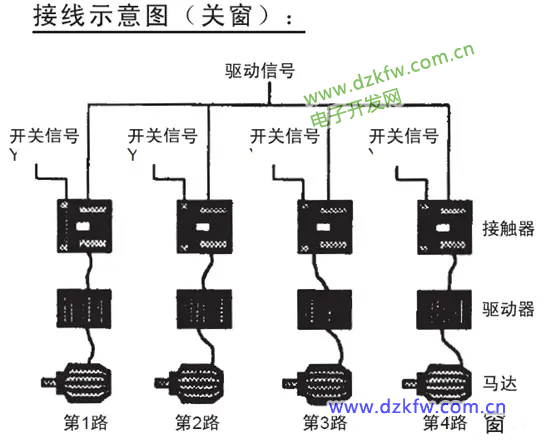
│╠ą“šf├„Ż║
ŠÄ│╠š▀Įø│Ż▀`▒│Ą├ęÄätųąėąę╗Śl╩ŪĪ▒║åå╬╗»įŁätĪ░ĪŻ╚ń╣¹│╠ą“║åå╬Ż¼ät╩Ū╚▌ęūīæ│÷Ż¼╚▌ęūÖz▓ķŻ¼Č°Ūę╩Ū║▄╔┘Ģ■│÷ÕeĪŻ▓╗╩Ū╦∙ėąŪķørČ╝ę¬Ū¾7╬╗Š½Č╚╗“║├Ą─┐žųŲŻ¼▒ŠĒōĮo│÷Ą─┤¾┼’šf├„┴╦ę╗éĆį┌īWąŻųąīWĄĮĄ─╗∙▒ŠįŁ└Ē╩Ū╚ń║╬ė├üĒėąą¦Č°┴«ārĄžĮŌøQå¢Ņ}ĄžĪŻ▒Š└²ųąŻ¼ļpĮī┘Ślė├üĒÖz£yų▄ć·£žČ╚Ż¼▀@┐╔ęį╩Ūę╗éĆ┐žųŲ╦∙ėą┤░æ¶Ąž┤¾ą═╔╠śIŠG┼’Ż¼╗“╩Ūėąę╗éĆ┤░æ¶Ą─╗©ł@ŠG┼’ĪŻ▒Š└²╩Ū┐žųŲ╦─╔╚┤░æ¶Ż¼├┐╔╚┤░æ¶ėąę╗éĆÖz£y£žČ╚Ą─ļpĮī┘ŚlŻ¼ī”├┐éĆļpĮī┘ŚlŻ¼┤µį┌ā╔éĆ▌ö╚ļŻ¼ę╗éĆī”æ¬Įī┘Śl└õĄ─ŪķørŻ¼▀@┐╔ęįšJ×ķ╩Ū│Żķ]Ą─Ż¼┴Ēę╗éĆī”æ¬Įī┘Śl¤ßĄ─ŪķørŻ©╝┤╦³ūāą╬ĢrŻ®Ż¼┐╔šJ×ķĢrę╗éĆ│Żķ_Įė³cĪŻ▀@ą®▌ö╚ļ┼c┤░æ¶ĀŅæBėąų▒Įė┬ōŽĄŻ¼╚ń╣¹▀^¤ßŻ¼ļpĮī┘ŚlÅØŪ·Ż¼ė|³cĮė═©Ż¼ė┌╩Ū┤░æ¶┤“ķ_ĪŻ«ö┤¾┼’▓┐Ęųūā└õĢrŻ¼ļpĮī┘Śl╔ņų▒Ż¼┤░æ¶ĻP╔ŽĪŻ
ę¬ūóęŌĄ─╩Ūų╗ė├ĄĮę╗éĆPLSYųĖ┴ŅŻ¼▀@╩Ūę“×ķ╦³Ą─▌ö│÷╚ń╦∙ę¬Ū¾Ą──ŪśėŻ¼ų▒Įė┼c╦─éĆļŖÖCųąĄ─├┐éĆŽÓ▀BŻ©ę╗éĆļŖÖCī”æ¬ė┌ę╗éĆ┤░æ¶Ż®ĪŻ▀ĆąĶÖz£y┤░æ¶╬╗ų├╬╗╚½ķ_╗“╚½ĻPŻ¼╚ń╣¹Ųõųąę╗éĆŚl╝■ØMūŃŻ¼┼c╦³ī”æ¬Ą─┐žųŲļŖÖCŠ═ĻPöÓĪŻPLSYųĖ┴Ņ▒╗ķ_╗“ĻP┤░æ¶Ą─šłŪ¾Įė═©ĪŻ▀@▓┐Ęų│╠ą“┐╔ū÷Ė─▀MŻ║šłŪ¾Öz▓ķ┤░æ¶ĀŅæB-┐╔ęįÖz£y╚½ķ_╚½ĻPĄ─Öz£yŲ„ĪŻ
░Ė└²░╦Ż║ŠSūoļŖ╠▌
└ĒŽļĄ─ŠÄ│╠╝╝ąg╩ŪĮ©┴óįSČÓś╦£╩│╠ą“Ż¼▀@ą®│╠ą“─▄▐DōQ╩╣ė├ĄĮäeĄ─│╠ą“ųąĪŻ▀@Š═Ž±░č╬óą═│╠ą“ē║┐sį┌ę╗ŲŻ¼▓ó░č╦¹éāĘ┼╚ļę╗éĆĖ³┤¾Ą─│╠ą“ųąŻ¼▀@ę▓─▄╩╣├┐éĆ▌^ąĪĄ─│╠ą“į┌▓╗═¼Ģr║“▒╗ČÓ┤╬š{ė├ĪŻ▀@╩ŪSTLŠÄ│╠ūŅ┤¾ā׳cų«ę╗ĪŻ
│╠ą“šf├„Ż║
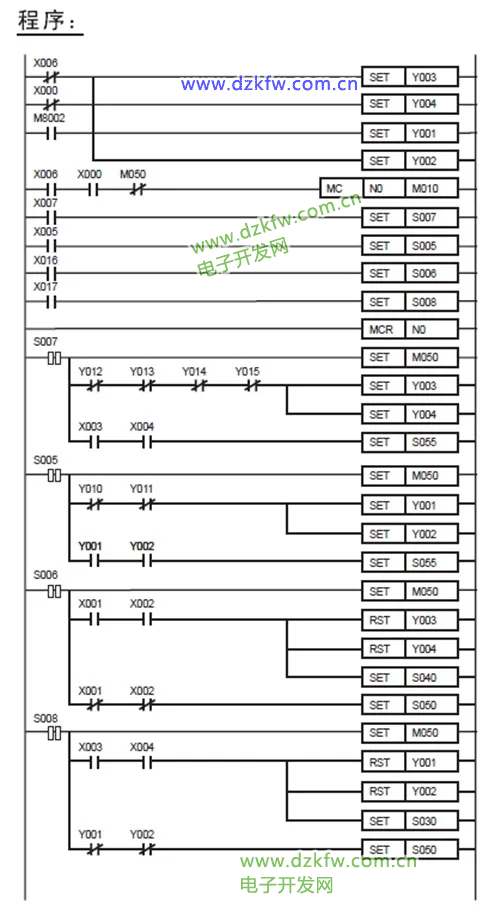
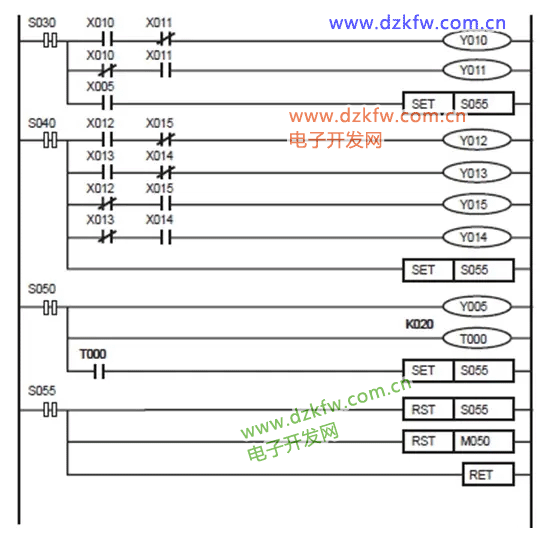
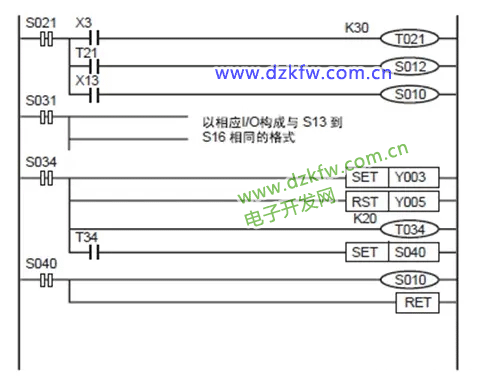
▒Š└²ć·└@ę╗┼_ęŲäėŲĮ┼_ŠÄīæĪŻ├┐éĆ▓┘ū„╗“├┐ĘĮ├µ▓┘ū„īæ╚ļĄĮūį╝║Ą─STL▓ĮųąĪŻ▀@┤_īŹĮoŠÄ│╠š▀╠ß╣®┴╦ę╗éĆ─Ż░Õ│╠ą“Ż¼┤╦│╠ą“─▄é„╦═╚ļäeĄ─│╠ą“ųąĪŻČ°Ūę▀@ĘNū÷Ę©╠ß╣®┴╦░▓╚½ąįŻ¼▓ó╣─äŅ┴╦═©ė├│╠ą“Ą─ųžÅ═║Žė├ĪŻŽ┬├µ│╠ą“šf├„┴╦▀@³cĪŻī”ė┌ŲĮ┼_╔ŽęŲŻ¼Ųõ╗∙▒ŠŚl╝■ų«ę╗╩╣«öŲĮ┼_╔²ŲŻ¼╦³Š═▓╗─▄į┌╚╬║╬Ųõ╦¹ŲĮ├µ╔ŽęŲäėĪŻ┐╔ęįÅ─Ž┬├µĘĮ╩Į┐┤ĄĮ▀@ę╗³cŻ║╔²Ė▀║═ĮĄĄ═ŲĮ┼_Ż©STL▓ĮS8Ż®Ą─│╠ą“═Ļ╚½╣┬┴óė┌į┌XYŲĮ├µ╔ŽęŲäėŲĮ┼_Ż©STL▓ĮS6Ż®Ą─│╠ą“Ż¼«öŲõųąę╗ĘN─Ż╩Įėąą¦Ż¼┴Ēę╗─Ż╩ĮŠ═▓╗─▄╣żū„ĪŻ×ķ┴╦šf├„╣▓ŽĒ│╠ą“Ą─╩╣ė├ĘĮĘ©║═║├╠ÄŻ¼┐┤ę╗Ž┬STL▓ĮS50Ģ■├„░ūŻ¼«ö┤µį┌ę╗éĆÕeš`ĀŅæBĢrŻ¼STL▓ĮS6║═S8š{ė├▀@éĆ│╠ą“ĪŻSTL▓ĮS55ę▓▒╗Ū░├µĄ─ČÓ┬ĘSTL╦∙š{ė├Ż¼ų„ę¬╩ŪS5,7,30,40║═50Ż¼į┌▀@éĆ╠ž╩ŌŪķørųąŻ¼S55ų╗ė├üĒÅ═╬╗║═ĘĄ╗ž│╠ą“┐žųŲĪŻ┴Ē═Ōę╗éĆę¬³c╩Ū╩╣ė├ų„┐žųĖ┴Ņ▀xō±ę¬▒╗Įė═©Ą──Ż╩Į╗“╣”─▄Ż¼«ö▀xō±┤_Č©Ż¼ś╦ųŠM50ė├ęįµiČ©╦∙ėąäeĄ─▀xō±Ż¼ų¬Ą└«öŪ░▀xō±═Ļ│╔ĪŻ
░Ė└²Š┼Ż║ėą╚żĄ─ćŖ╚¬
×ķ┴╦Ą├ĄĮę╗éĆĮŌøQĘĮĘ©Ż¼ėąĢrąĶę¬Ę┤Ž“Ąž╦╝┐╝å¢Ņ}ĪŻ═©▀^├┐éĆćŖūņ╩╣ė├ę╗éƬÜ┴ó▒├Ż¼┐╔─▄║▄╚▌ęūĄžĮŌøQŽ┬├µĄžćŖ╚¬å¢Ņ}Ż¼▒├ē║ūā╗»Ģ■╩╣ćŖ╚¬Ė▀Ą═ūā╗»ĪŻĄ½Ż¼▀@šµĄ─╩╣ūŅėąą¦Ą─ĘĮĘ©å߯┐

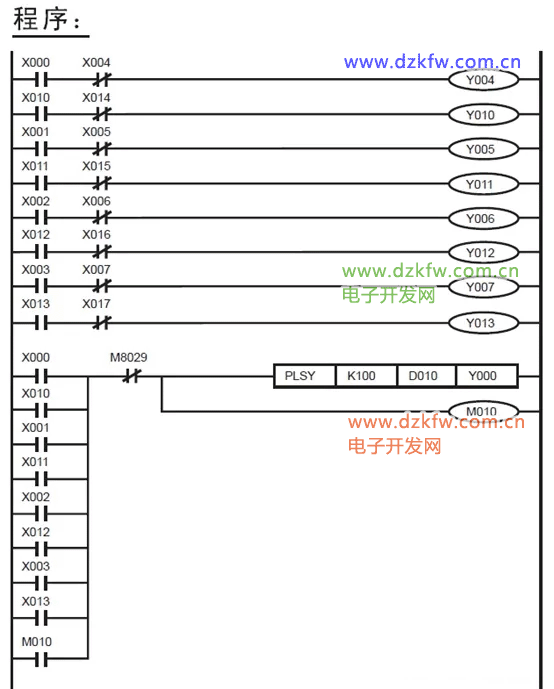
│╠ą“šf├„Ż║
▒Š└²─┐Ą─╩Ū┐žųŲ║═Ė─ūāćŖ╚¬Ą─Ė▀Ą═ĪŻ×ķ┴╦ū÷ĄĮ▀@ę╗³cŻ¼Å─▓╗═¼ćŖūņųąćŖ│÷Ą─╦«ąĶę¬ūā╗»ęįäōįņę╗ĘNŅAŲ┌Ą──Ż╩ĮĪŻę╗éĆ║åå╬ĘĮĘ©╩Ū╩╣ė├ČÓ┬Ę▒├▓óŪę┐žųŲ▒├▀\ąąĄ─ē║┴”ĪŻ╚╗Č°Ż¼ē║┴”╩Ū┴”/├µĘeĄ─║»öĄĪŻ╚ń╣¹ē║┴”▒Ż│ų×ķ│ŻöĄŻ¼Č°┴„▀^Ą─╦«├µĘeūā╗»Ż¼┴”║═ė╔┤╦ī¦ų┬Ą─╦«Ī░ćŖ╔õĪ▒ŠÓļxĢ■ūā╗»Ż¼ŲõĘĮ╩Į┼cĖ─ūā▒├ē║┴”ę²ŲĄ─ūā╗»ŽÓ═¼ĪŻ
Å─ę╗éĆ▓╗═¼Ą─ĮŪČ╚üĒ┐╝æ]▀@éĆå¢Ņ}Ż¼Š═─▄šęĄĮę╗éĆ═Ļ╚½▓╗═¼Ą─ŽļĘ©ĪŻŽ┬├µĮo│÷Ą─│╠ą“ęįę╗éĆ╣żū„│╠ą“ą╬╩Įšf├„▀@éĆŽļĘ©ĪŻ
ćŖūņ├┐░ļéĆąĪĢrĖ─ūā╦³Ą──Ż╩ĮŻ¼ę╗éĆ═©▀^│╠ą“Æ▀├Ķł╠ąąPLSYųĖ┴ŅĄ─╗ž┬Ę┐žųŲ├┐ĮMķyķTĪŻ
ā╔éĆöĄō■╝─┤µŲ„▒╗╠Ä└ĒŻ¼Å─Č°Ą├ĄĮā╔éĆ▓╗═¼Ą─ćŖ╚¬─Ż╩ĮĪŻ├┐éĆöĄō■╝─┤µŲ„Äņ░³║¼╦∙ę¬Ū¾Ą├ė├PLSYųĖ┴Ņ▌ö│÷Ą├├}ø_öĄŻ¼─┐Ą─╩ŪįOČ©▀xō±Ą├ķyķTį┘š²┤_╬╗ų├╔ŽĪŻ
ę“×ķöĄō■╝─┤µŲ„═©▀^ūāųĘ╝─┤µŲ„ZĄ├▀fį÷üĒ▀xō±Ż¼▀@ĘNĘĮĘ©ę▓ė├ė┌¬Ü┴óĄž▀xō±├┐éĆķyķTĪŻ╩Ū▀@├┤īŹ¼FĄ─Ż║ęŲäėZųąĄ─öĄō■▀M╚ļ╬╗─Ż╩ĮŻ¼Įėų°ėąą¦╬╗į¬╝■ė├üĒ“īäė╦∙▀xō±Ą─ķyķTŻ¼ę▓┐╔╩╣ė├ČÓ┬Ę▒╚▌^ųĖ┴ŅüĒ═Ļ│╔ĪŻ═©▀^Įė═©ķyķT▀xō±▌ö│÷Y5ĄĮY10ųąĄ─ę╗éĆŻ¼PLSYųĖ┴ŅŻ©Y000Ż®Ą─å╬├}ø_▌ö│÷ę╗┤╬ųžČ©Ž“ų┴├┐éĆķyķTĪŻ
░Ė└²╩«Ż║Į╗═©ųĖ╩Š¤¶
ę╗░ŃČ°čį«ö╠ß│÷ę╗éĆå¢Ņ}ĢrŻ¼ĮŌĘ©┐┤╦ŲŽÓ«ö║åå╬ĪŻ╚╗Č°Ż¼«öķ_╩╝Į©┴ó▒žę¬Ą─░▓╚½ąį║═▓┘ū„ąįĢrŻ¼Ģ■±R╔Ž╩╣─ŪéĆ║åå╬å¢Ņ}│╔×ķę╗éĆž¼ē¶Ż¼▒╚╚ń▌p▒ŃĮ╗═©ą┼╠¢¤¶ĪŁĪŁ
│╠ą“šf├„Ż║
Į╗═©ą┼╠¢¤¶Ą─╣żū„į┌╩└ĮńĖ„Ąž┬įėą▓╗═¼Ż¼▓╗▀^Ųõ╗∙▒ŠįŁ└Ē╩Ūę╗śėĄ─Ż║
1Īó ╦ŠÖCįŁĄž▓╗äėĄ╚┤²Ż¼ų¬Ą└ę╗Śl░▓╚½┬ĘŠĆ│÷¼FĪŻ
2Īó ī”š²į┌┤®įĮ±R┬ĘĄ─▄ć▌vŻ¼×ķ┴╦▒▄ķ_▄ć▌vŽÓū▓╗“šŽĄK╬’Ż¼į╩įSČ╠Ģ║═ŻŅDĪŻ
3Īó «ö╦∙ėą┐╔─▄╬ŻļU┬ĘŠĆĢ║═ŻĢrŻ¼į╩įSįŁĄžĄ╚┤²Ą─╦ŠÖCŪ░ąąĪŻ
ī”ę╗▒KĮ╗═©¤¶üĒšfŻ¼▀@▓╗╩ŪéĆÅ═ļsĄ─▀^│╠ĪŻĄ½╩ŪŻ¼╦¹éā│Ż│Ż╩ŪČÓ┬Ęę╗Ų│÷¼FĄ─Ż¼╦∙ęįę¬Ū¾═Ļ╚½╗źµi║═┐žųŲĪŻ▒Š└²ųąŻ¼ŪķørĖ³×ķÅ═ļs╗»Ż¼š²į┌╩╣ė├▀@ĮM¤¶Ą─╣żū„╚╦åTį┌ł╠ąą─│ĒŚ╣żū„╗“─│éĆ▓┘ū„ĢrŻ¼╚╬║╬▄ć▌vĮø▀^Č╝Ģ■ī¦ų┬×─ļyŻ¼╦∙ęį┤╦Ģrį╩įS╣żū„╚╦åT═Żų╣╦∙ėąĘĮŽ“Ą─Į╗═©Ż¼┤╦ĢrūŅ║åå╬Ą─ĘĮĘ©Ģrė├▓Į▀M╠▌ą╬łD╗“STLŠÄ│╠ĪŻę¬┐╝æ]├┐éĆĢrķg▓ó░č╦³▐DōQ│╔×ķę╗éĆSTL▓ĮŻ¼┤_▒Żø]ėą▀z┬®╚╬║╬▓ĮŻ¼ę“×ķ├┐ę╗éĆSTL▓ĮČ╝┐╔ęįšJ×ķĢrę╗éĆ╬óą═Ą─═Ļš¹│╠ą“Ż¼ŠÄ│╠╚╦╬’Š═ūāĄ├║åå╬ČÓ┴╦ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū