
ę╗Īó ╚╬äš(w©┤)├Ķ╩÷
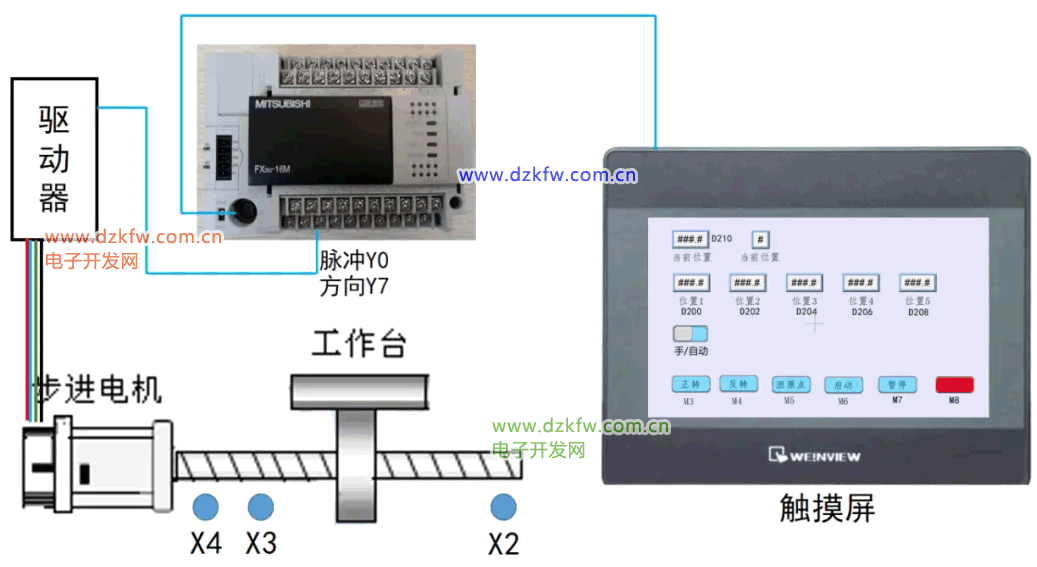
1Īó░Ė└²Ż©ĒŚ(xi©żng)─┐Ż®├Ķ╩÷╚ńŽ┬Ż¼ėąę╗┼_ė|├■Ų┴Ż¼▀BĮė┴╦ę╗┼_3UĄ─PLCŻ¼PLCŽ┬├µÄ¦┴╦ę╗┼_▓Į▀M(j©¼n)ļŖÖC(j©®)Ż¼¼F(xi©żn)į┌ąĶę¬īæę╗Č╬┐žųŲĄ─│╠ą“?q©▒)”▓Į▀M(j©¼n)ļŖÖC(j©®)▀M(j©¼n)ąą┐žųŲĪŻŻ© ▓Į▀M(j©¼n)ļŖÖC(j©®)▓ĮŠÓĮŪ1.8Ż¼┬▌ŠÓ2mmŻ¼╝Ü(x©¼)ĘųįO(sh©©)ų├×ķ4Ż╗X5╩Ūžō(f©┤)śOŽ▐ Ż¼X4╩ŪįŁ³c(di©Żn)Ż¼X3╩Ūš²śOŽ▐Ż®ĪŻ
1Ż®╩ųäė(d©░ng)─Ż╩ĮŽ┬Ż¼┐╔ūįäė(d©░ng)š²Ę┤▐D(zhu©Żn)ĪŻ
2Ż®░┤Ž┬╗žįŁ³c(di©Żn)░┤ŌoŻ¼─▄ē“ūįäė(d©░ng)╗žįŁ³c(di©Żn)Ż¼╗ž═ĻįŁ³c(di©Żn)▓┼┐╔▀M(j©¼n)ąąūįäė(d©░ng)ĪŻ
3Ż®ūįäė(d©░ng)─Ż╩ĮŽ┬Ż¼═¼Ģr(sh©¬)įŁ³c(di©Żn)╗žÜw═Ļ«ģ Ż¼░┤Ž┬åóäė(d©░ng)░┤ŌoŻ¼ļŖÖC(j©®)░┤ššįO(sh©©)Č©Ą─╬╗ų├ū▀Ż©╬╗ų├1Ī¬Ī¬╬╗ų├2Ī¬Ī¬╬╗ų├3Ī¬Ī¬╬╗ų├4Ī¬Ī¬╬╗ų├5Ī¬Ī¬╬╗ų├1Ż®▓╗öÓ裣h(hu©ón)ĪŻ
4Ż®░┤Ž┬╝▒═Ż░┤Ōo░┤ŌoŻ¼▓Į▀M(j©¼n)ļŖÖC(j©®)┴ó╝┤═Żų╣▀\(y©┤n)ąąĪŻąĶųžą┬ł╠(zh©¬)ąąę╗┤╬įŁ³c(di©Żn)╗žÜwųĖ┴ŅĪŻ
5Ż®░┤Ž┬Ģ║═Ż░┤ŌoĢr(sh©¬)Ż¼įO(sh©©)éõ═Żų╣Ż¼ųžą┬░┤Ž┬åóäė(d©░ng)Ģr(sh©¬)įO(sh©©)éõ└^└m(x©┤)äė(d©░ng)ū„ĪŻ
Č■Īóį¬╝■▀xą═I/O┼┼▓╝
1ĪóļŖÜŌį¬╝■▀xą═Ż║

╚²ĪóļŖÖC(j©®)ĮėŠĆ

╦─Īó│╠ą“ŠÄīæ
1Īó╩ųäė(d©░ng)┐žųŲŻ║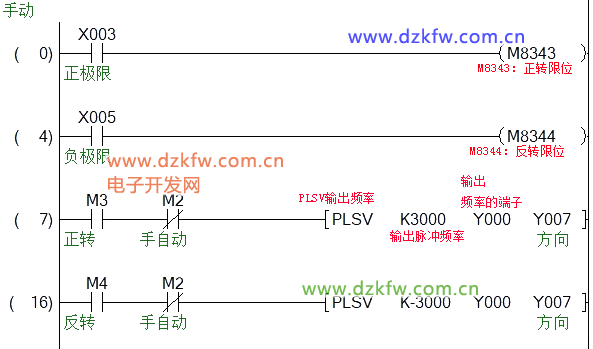
M8343║═M8344Ęųäe╩ŪY0▌SĄ─š²žō(f©┤)śOŽ▐╠ž╩Ō└^ļŖŲ„Ż¼ų▒Įė║══Ō▓┐ą┼╠¢ę╗ę╗ī”æ¬(y©®ng)Ż¼▀@śėļŖÖC(j©®)┼÷ĄĮī”æ¬(y©®ng)Ą─śOŽ▐Š═Ģ■═ŻŻ¼į┌╩ųäė(d©░ng)M2öÓķ_Ģr(sh©¬)Ż¼M2│Żķ]ė|³c(di©Żn)ī¦(d©Żo)═©Ż¼ė|├■Ų┴Ą─š²Ę┤▐D(zhu©Żn)░┤ŌoM3║═M4┐žųŲ┴╦┐╔ūā╦┘├}ø_▌ö│÷ųĖ┴Ņ┐žųŲļŖÖC(j©®)š²Ę┤▐D(zhu©Żn)Ż¼Ņl┬╩Ģ║Ģr(sh©¬)╣╠Č©×ķ3000HZĪŻ
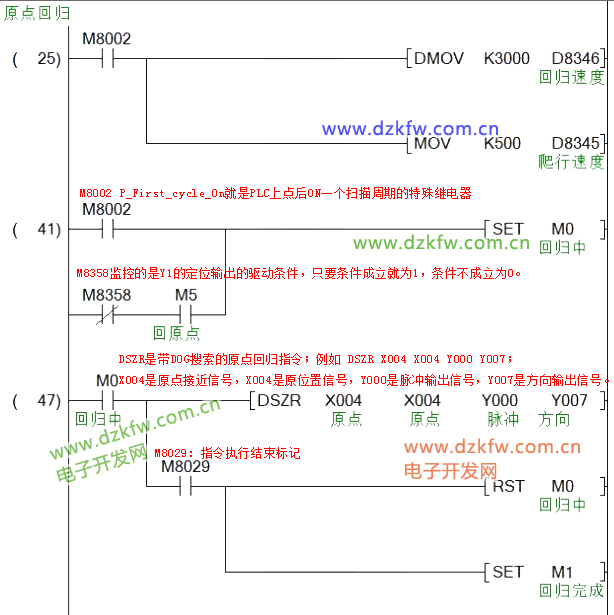
2ĪóįŁ³c(di©Żn)╗žÜwŻ║PLCķ_ÖC(j©®)Ģr(sh©¬)Ż¼ė├M8002įO(sh©©)ų├┼└ąą╦┘Č╚║═╗žÜw╦┘Č╚Ż¼░č╗žÜw╦┘Č╚įO(sh©©)ų├×ķ3000HZŻ¼┼└ąą╦┘Č╚įO(sh©©)ų├×ķ500HZŻ╗
«ö(d©Īng)plcķ_ÖC(j©®)Ģr(sh©¬)Ż¼╗“š▀ė|├■Ų┴░┤Ž┬╗žįŁ³c(di©Żn)░┤ŌoM5Ģr(sh©¬)Ż¼ė|░l(f©Ī)M0╚ź“ī(q©▒)äė(d©░ng)įŁ³c(di©Żn)╗žÜwųĖ┴ŅŻ¼ł╠(zh©¬)ąąįŁ³c(di©Żn)╗žÜwŻ¼ł╠(zh©¬)ąą═Ļ«ģŠ═Å═(f©┤)╬╗M0,═¼Ģr(sh©¬)ų├╬╗M1,M1ų├╬╗įŁ³c(di©Żn)╗žÜw═Ļ│╔ś╦(bi©Īo)ųŠ╬╗Ż¼╦³ī¦(d©Żo)═©┴╦šf├„įŁ³c(di©Żn)╗žÜw═Ļ│╔Ż¼║¾├µ▓┼┐╔ęį┐žųŲūįäė(d©░ng)┐žųŲĄ─äė(d©░ng)ū„ĪŻ
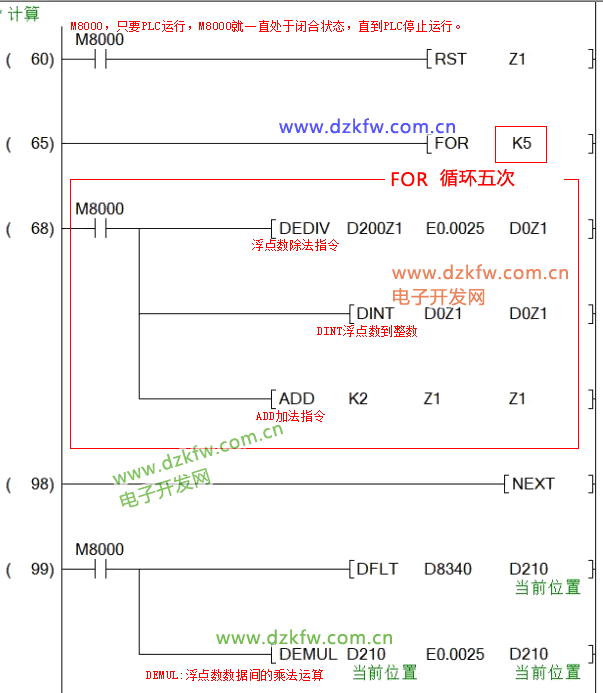
ęčų¬▓Į▀M(j©¼n)ļŖÖC(j©®)▓ĮŠÓļxĮŪ1.8ĪŃŻ¼╝Ü(x©¼)Ęų4Ż¼ę▓Š═╩Ūę╗éĆ(g©©)├}ø_ū▀Ą─ĮŪČ╚╩Ū1.8/4=0.45ĪŃŻ¼360ĪŃ│²ęį0.45Č╚Ż¼Ą╚ė┌800Ż¼ę▓Š═╩Ū░l(f©Ī)╦═800éĆ(g©©)├}ø_▐D(zhu©Żn)äė(d©░ng)ę╗╚”Ż¼ęčų¬┬▌ŚUĄ─┬▌ŠÓ╩Ū2mmŻ¼ļŖÖC(j©®)▐D(zhu©Żn)äė(d©░ng)ę╗╚”ū▀2mmŻ¼ąĶę¬800éĆ(g©©)├}ø_Ż¼┐╔ęįĄ├│÷├}ø_«ö(d©Īng)┴┐=2mm/800 =0.0025mm
ėŗ(j©¼)╦ŃĢr(sh©¬)Ż¼ė├ŠÓļx│²ęį├}ø_«ö(d©Īng)┴┐Š═╩ŪīŹ(sh©¬)ļH├}ø_öĄ(sh©┤)Ż¼░č5éĆ(g©©)╬╗ų├Ą─ŠÓļxÅ─D200ĪóD202ĪóD204ĪóD206ĪóD208▐D(zhu©Żn)╗»ĄĮD0ĪóD2ĪóD4ĪóD6ĪóD8ĪŻ
D8340╩ŪY0ų▄Ą─╬╗ų├ą┼ŽóŻ¼░č├}ø_ą┼Žó═©▀^DFLTųĖ┴Ņ▐D(zhu©Żn)ōQ│╔ĖĪ³c(di©Żn)öĄ(sh©┤)Ż¼╚╗║¾│╦ęį├}ø_«ö(d©Īng)┴┐Ż¼Š═Ą├│÷īŹ(sh©¬)ļHŠÓļxŻ¼Ę┼į┌D210└’├µŻ¼į┌ė|├■Ų┴▀M(j©¼n)ąą’@╩ŠĪŻ
4Īóūįäė(d©░ng)┐žųŲåó═ŻŻ║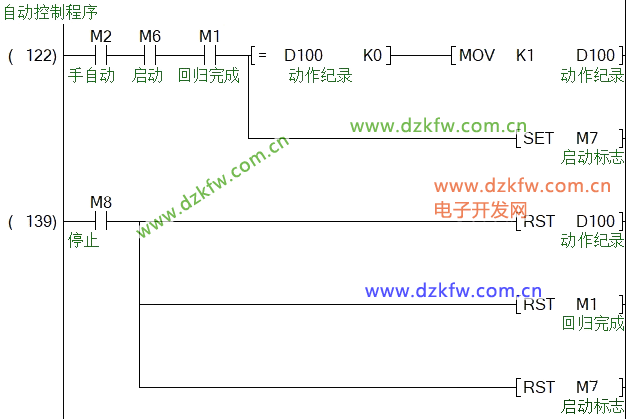
į┌╩ųäė(d©░ng)ĀŅæB(t©żi)Ż¼▓óŪę╗žįŁ³c(di©Żn)═Ļ│╔Ż¼D100 =0Ģr(sh©¬)Ż¼Š═▀M(j©¼n)╚ļĄ┌1▓Įäė(d©░ng)ū„Ż¼ī¦(d©Żo)═©M7åóäė(d©░ng)ś╦(bi©Īo)ųŠ╬╗Ż¼Ēśą“▀\(y©┤n)ąąĄ─│╠ą“į┌║¾├µīæĪŻ
░┤Ž┬═Żų╣░┤ŌoÅ═(f©┤)╬╗D100,Å═(f©┤)╬╗įŁ³c(di©Żn)╗žÜw═Ļ│╔Ż¼Å═(f©┤)╬╗åóäė(d©░ng)ś╦(bi©Īo)ųŠĪŻ
5ĪóĒśą“┐žųŲŻ║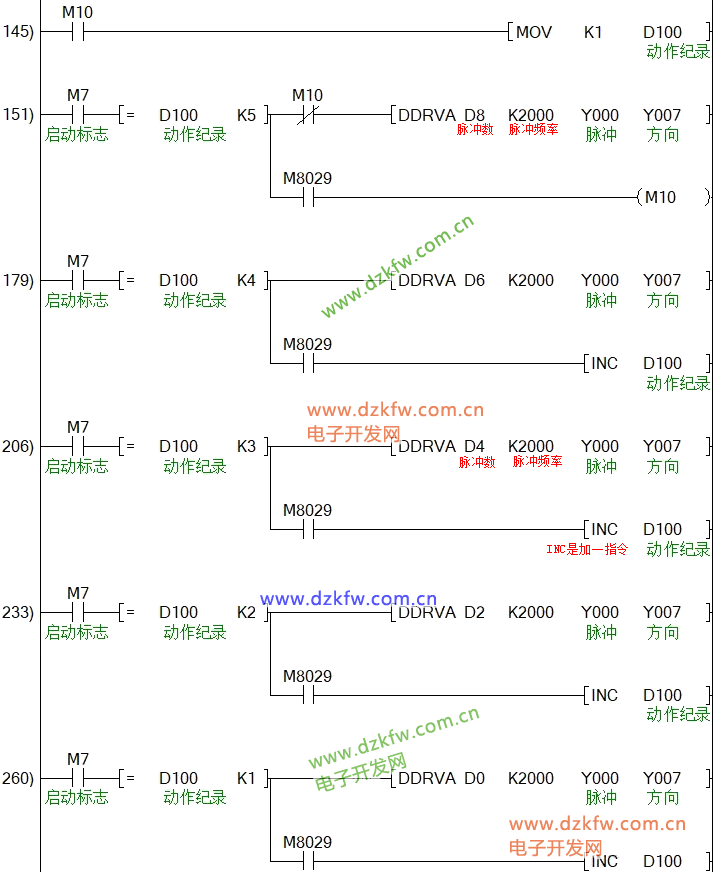
äė(d©░ng)ū„ąĶę¬─µą“?q©▒)æŻ¼Ą┌ę╗▓Įīæį┌ūŅ║¾Ż¼ä?d©░ng)ū„═Ļ│╔M8029Ģ■ī¦(d©Żo)═©Ż¼╩╣ė├INCūīD100╝ė1Ż¼║¾├µ├┐ę╗▓ĮČ╝ę╗śėŻ╗▀\(y©┤n)ąąĄĮĄ┌5▓ĮŻ¼ė├M8029ī¦(d©Żo)═©M10ŠĆ╚”Ż¼M10Ą─│Żķ_īæį┌▀@ę╗ąą│╠ą“╔Ž├µŻ¼ė├MOVųĖ┴ŅūīD100╗žĄĮĄ┌1▓ĮŻ¼▀@śėīæ╩Ū×ķ┴╦Ė¶ķ_ę╗éĆ(g©©)Æ▀├Ķų▄Ų┌Ż¼ūīĄ┌5▓ĮĄ─äė(d©░ng)ū„║═Ą┌ę╗▓ĮĄ─Č©╬╗ųĖ┴Ņ▓╗į┌═¼ę╗éĆ(g©©)Æ▀├Ķų▄Ų┌└’├µ▀\(y©┤n)ąąĪŻ
ė|├■Ų┴ū÷M7Ą─░┤ŌoĢr(sh©¬)Ż¼ę¬▀xō±Å═(f©┤)╬╗░┤ŌoŻ¼░┤Ž┬═Żų╣Ż¼Š═ų╗─▄öÓķ_M7Ż¼Ž┬┤╬░┤Ž┬åóäė(d©░ng)Ģr(sh©¬)Ż¼Š═ųžą┬ī¦(d©Żo)═©M7Ż¼ųžą┬▀\(y©┤n)ąąĪŻ
ęį╔ŽŠ═╩Ū╬ęéā░Ė└²Ą─╚½▓┐ā╚(n©©i)╚▌┴╦Ż¼▀@└’į┘┴¶ę╗éĆ(g©©)╦╝┐╝Ņ}─┐Įo┤¾╝ęŻ¼╚ń╣¹ąĶę¬į┌ė|├■Ų┴╔Ž├µįO(sh©©)ų├ę╗éĆ(g©©)╦┘Č╚Ą─▌ö╚ļ┐“Ż¼å╬╬╗╩Ūmm/s,─▄īŹ(sh©¬)¼F(xi©żn)ī”╦┘Č╚Ą─š{(di©żo)╣Ø(ji©”)Ż¼įō╚ń║╬ŠÄīæ│╠ą“Ż┐
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū