
ę╗ĪóīŹ“×─┐Ą─
1ĪóšŲ╬š▓Į▀MļŖÖCĄ─╣żū„įŁ└Ē
2ĪóšŲ╬šÄ¦“īäėļŖį┤Ą─▓Į▀MļŖÖCĄ─┐žųŲĘĮĘ©
3ĪóšŲ╬šDECOųĖ┴ŅīŹ¼F▓Į▀MļŖÖCš²Ę┤▐D║═š{╦┘┐žųŲĄ─│╠ą“
Č■ĪóīŹė¢āxŲ„║═įOéõ
1ĪóPLC┐žųŲŲ„ ę╗┼_
2Īóā╔ŽÓ╦─┼─Ħ“īäėļŖį┤Ą─▓Į▀MļŖÖCę╗╠ū
3Īóš²Ę┤ŪąōQķ_ĻPĪóŲ═Żķ_ĻPĪóį÷£p╦┘ķ_ĻPĖ„ę╗éĆ
╚²Īó▓Į▀MļŖÖC╣żū„įŁ└Ē
▓Į▀MļŖÖC╩Ū╝ā┤ŌĄ─öĄūų┐žųŲļŖäėÖCŻ¼╦³īóļŖ├}ø_ą┼╠¢▐DōQ│╔ĮŪ╬╗ęŲŻ¼╝┤Įoę╗éĆ├}ø_ą┼╠¢Ż¼▓Į▀MļŖÖCŠ═▐Däėę╗éĆĮŪČ╚Ż¼łD3-1╩Ūę╗éĆ╚²ŽÓĘ┤æ¬╩Į▓Į▀MļŖÖCĮYłDĪŻÅ─łDųą┐╔ęį┐┤│÷Ż¼╦³Ęų│╔▐Dūė║═Č©ūėā╔▓┐ĘųĪŻČ©ūė╩Ūė╔╣ĶõōŲ¼»B│╔Ż¼Č©ūė╔Žėą┴∙éĆ┤┼śOŻ©┤¾śOŻ®Ż¼├┐ā╔éĆŽÓī”Ą─┤┼śOŻ©NĪóSśOŻ®ĮM│╔ę╗ī”ĪŻ╣▓ėą3ī”ĪŻ├┐ī”┤┼śOČ╝└@ėą═¼ę╗└@ĮMŻ¼ę▓╝┤ą╬│╔1ŽÓŻ¼▀@śė╚²ī”┤┼śOėą3éĆ└@ĮMŻ¼ą╬│╔╚²ŽÓĪŻ┐╔ęįĄ├│÷Ż¼╚²ŽÓ▓Į▀MļŖÖCėą3ī”┤┼śOĪó3ŽÓ└@ĮMŻ╗╦─ŽÓ▓Į▀MļŖÖCėą4ī”┤┼śOĪó╦─ŽÓ└@ĮMŻ¼ę└┤╦ŅÉ═ŲĪŻ
Ę┤æ¬╩Į▓Į▀MļŖäėÖCĄ─äė┴”üĒūįė┌ļŖ┤┼┴”ĪŻį┌ļŖ┤┼┴”Ą─ū„ė├Ž┬Ż¼▐Dūė▒╗ÅŖąą═ŲäėĄĮūŅ┤¾┤┼ī¦┬╩Ż©╗“š▀ūŅąĪ┤┼ūĶŻ®Ą─╬╗ų├Ż¼╚ńłD3-1Ż©aŻ®╦∙╩ŠŻ¼Č©ūėąĪ²X┼c▐DūėąĪ²Xī”²RĄ─╬╗ų├Ż¼▓ó╠Äė┌ŲĮ║ŌĀŅæBĪŻī”╚²ŽÓ«É▓ĮļŖäėÖCüĒšfŻ¼«ö─│ę╗ŽÓĄ─┤┼śO╠Äė┌ūŅ┤¾ī¦┤┼╬╗ų├ĢrŻ¼┴Ē═Ōā╔ŽÓŽÓ▒ž╠Äė┌ĘŪūŅ┤¾ī¦┤┼╬╗ų├Ż¼╚ńłD3-1Ż©bŻ®╦∙╩ŠŻ¼╝┤Č©ūėąĪ²X┼c▐DūėąĪ²X▓╗ī”²RĄ─╬╗ų├ĪŻ
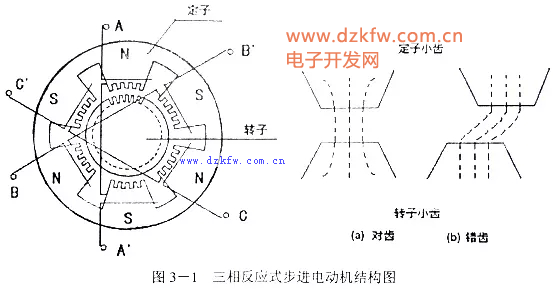
░čČ©ūėąĪ²X┼c▐DūėąĪ²Xī”²RĄ─ĀŅæBĘQ×ķī”²XŻ¼░čČ©ūėąĪ²X┼c▐DūėąĪ²X▓╗ī”²RĄ─ĀŅæBĘQ×ķÕe²XĪŻÕe²XĄ─┤µį┌╩Ū▓Į▀MļŖÖC─▄ē“ą²▐DĄ─Ū░╠ߌl╝■Ż¼╦∙ęįŻ¼į┌▓Į▀MļŖÖCĄ─ĮYśŗųą▒žĒÜ▒ŻūCėąÕe²XĄ─┤µį┌Ż¼ę▓Š═╩ŪšfŻ¼«ö─│ę╗ŽÓ╠Äė┌ī”²XĀŅæBĢrŻ¼Ųõ╦³└@ĮM▒žĒÜ╠Äė┌Õe²XĀŅæBĪŻ
▒ŠīŹ“ץ─ļŖÖC▓╔ė├ā╔ŽÓ╗ņ║Ž╩Į▓Į▀MļŖÖCŻ¼Ųõā╚▓┐╔ŽŽ┬╩Ūā╔éĆ┤┼ĶFŻ¼ųąķg╩ŪŠĆ╚”Ż¼═©┴╦ų▒┴„ļŖęį║¾Ż¼Š═│╔┴╦ļŖ┤┼ĶFŻ¼▒╗╔ŽŽ┬Ą─┤┼ĶF╬³ę²║¾Š═«a╔·┴╦Ų½▐DĪŻę“×ķųąķg▀BĮėĄ─Ż¼╩Ū▓╔ė├į┌▐D▌SĄ─╬╗ų├ė├ę╗Ė∙╗¼äėĄ─Įėė|Ų¼ĪŻ▀@śė╚ń╣¹ļŖ┤┼ĶF▐D▀^┴╦Ņ^Ż¼įŁŽ╚▀BĮėļŖ┤┼ĶFĄ─ā╔Ė∙ŠĆäé║├Š═ŽÓĘ┤┴╦Ż¼╦∙ęįļŖ┤┼ĶFĄ─NśOSśOŠ═║═ęįŪ░ŽÓĘ┤┴╦ĪŻĄ½╩ŪļŖÖC╔ŽŽ┬Ą─┤┼ĶF╩Ū▓╗ūāĄ─Ż¼╦∙ęįėų┐╔ęį└^└m╬³ę²ųąķgĄ─ļŖ┤┼ĶFĪŻ«öļŖ┤┼ĶF└^└m▐DŻ¼ė╔ė┌æTąįėų▐D▀^┴╦Ņ^Ż¼╦∙ęįļŖśOėųŽÓĘ┤┴╦ĪŻųžÅ═╔Ž╩÷▀^│╠Š═▓Į▀MļŖÖC▐D┴╦ĪŻ
Ė∙ō■▀@éĆįŁ└ĒŻ¼╚ńłD3-2╦∙╩ŠŻ¼ā╔ŽÓ▓Į▀MļŖÖCĄ─▐Däė▓Į¾EŻ¼ęįš²▐D×ķ└²Ż║

ė╔łD┐╔ęŖŻ¼¼FŽÓ«É▓ĮļŖÖCš²▐D▀^│╠Ęų×ķ╦─éĆ▓Į¾EŻ¼╝┤AŽÓš²ĘĮŽ“ļŖ┴„ĪóBŽÓš²ĘĮŽ“ļŖ┴„ĪóAŽ“Ę┤ĘĮŽ“ļŖ┴„║═BŽÓĘ┤ĘĮŽ“ļŖ┴„ĪŻĘ┤▐D╣żū„Ą─Ēśą“┼cų«ŽÓĘ┤ĪŻAĪóBā╔ŽÓŠĆ╚”▓╗╩Ū╣╠Č©Ą─ļŖ┴„ĘĮŽ“Ż¼▀@┼cŲõ╦³▓Į▀MļŖÖCĄ─┐žųŲ▀ē▌ŗėą╦∙▓╗═¼ĪŻę“┤╦Ż¼┐žųŲ▓Į▀MļŖÖC▐DäėĢrŻ¼▒žĒÜ┐╝æ]ė├ōQŽÓĄ─╦╝┬ĘįOėŗīŹ“׊Ć┬ĘĪŻ┐╔ęįĖ∙ō■─ŻöM“īäėļŖ┬ĘĄ─╣”─▄║═plc▒žĒÜĄ─▀ē▌ŗĻPŽĄ▀Mąą│╠ą“įOėŗĪŻ
╦─Īó▓╔ė├▓Į▀MļŖÖC“īäėŲ„Ą─┐žųŲĘĮ╩Į
└¹ė├▓Į▀MļŖÖC“īäėŲ„┐╔ęį═©▀^PLCĄ─Ė▀╦┘▌ö│÷ą┼╠¢┐žųŲ▓Į▀MļŖÖCĄ─▀\äėĘĮŽ“Īó▀\ąą╦┘Č╚Īó▀\ąą▓ĮöĄĄ╚ĀŅæBĪŻŲõųąŻ║▓Į▀MļŖÖCĄ─ĘĮŽ“┐žųŲŻ¼ų╗ąĶę¬═©▀^┐žųŲU/DČ╦Ą─On║═OffŠ═─▄øQČ©ļŖÖCĄ─š²▐D╗“Ę┤▐DŻ╗īó╣Ō±ŅĖ¶ļxĄ─├}ø_ą┼╠¢▌ö╚ļĄĮCPČ╦Š═─▄øQČ©▓Į▀MļŖÖCĄ─╦┘Č╚║═▓ĮöĄŻ╗┐žųŲFREEą┼╠¢Š═─▄╩╣ļŖÖC╠Äė┌ūįė╔ĀŅæBĪŻ
ę“┤╦
PLC┐žųŲŲ„
▒Ē3-1 I/OĘų┼õ▒Ē
|
▌ö╚ļ³c |
▌ö│÷³c | ||
|
X0 |
š²▐D/Ę┤▐DĘĮŽ“ |
Y0 |
ļŖÖC┐žųŲ├}ø_ |
|
X1 |
ļŖÖC▐Däė |
Y1 |
š²▐D/Ę┤▐D▀\ąą |
|
X2 |
ļŖÖC═Żų╣ |
||
|
X4 |
Ņl┬╩į÷╝ė |
||
|
X5 |
Ņl┬╩£p╔┘ |
||
.
łD3-5 ╠▌ą╬łD
╬ÕĪó▓╔ė├PLC┐žųŲŲ„ų▒Įė┐žųŲ▓Į▀MļŖÖCĘĮ╩Į
ī”ė┌ā╔ŽÓ▓Į▀MļŖÖC┐žųŲŻ¼Ė∙ō■Ųõ╣żū„įŁ└ĒŻ¼▒žĒÜ┐╝æ]ŲõōQŽ“Ą─┐žųŲĘĮ╩ĮŻ¼ę“┤╦īóŲõ▓Į¾Eė├┤·╠¢ĘųĮŌŻ¼ät×ķŻ║ó┘īŹ¼FļŖ┴„ĘĮŽ“A+Ī·A-Īóó┌īŹ¼FļŖ┴„ĘĮŽ“B+Ī·B-Īóó█īŹ¼FļŖ┴„ĘĮŽ“A-Ī·A+Īóó▄īŹ¼FļŖ┴„ĘĮŽ“B-Ī·B+ĪŻ╚ń╣¹Ę┤▐Dät░┤ššó▄Īóó█Īóó┌Īóó┘Ą─Ēśą“┐žųŲĪŻ
PLCĄ─I/OĘų┼õ▒Ē░┤šš▒Ē3-2Ż¼Ęų┼õłD░┤ššłD3-6Ż¼╠▌ą╬łDęŖłD3-7ĪŻ
▒Ē3-2 PLCĄ─I/OĘų┼õ▒Ē
|
▌ö╚ļ³c |
▌ö│÷³c | ||
|
X0 |
š²▐D▀\ąą |
COM1 |
DC+12V |
|
X1 |
Ę┤▐D▀\ąą |
Y0 |
A+ |
|
X2 |
ūįäė/╩ųäė |
Y1 |
B+ |
|
X3 |
å╬▓Į▀\ąą |
Y2 |
A- |
|
X4 |
Ņl┬╩į÷╝ė |
Y3 |
B- |
|
X5 |
Ņl┬╩£p╔┘ |
COM2 |
DC+12V GND |
|
Y4 |
A- | ||
|
Y5 |
B- | ||
|
Y6 |
A+ | ||
|
Y7 |
B+ | ||

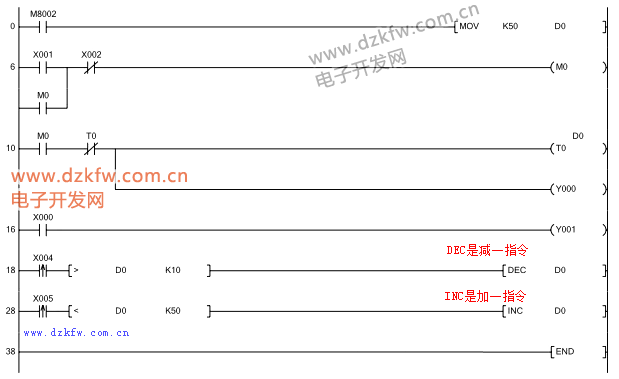
▓Į▀MļŖÖCš²Ę┤▐D║═š{╦┘┐žųŲĄ─╠▌ą╬łD╚ńłD3-7╦∙╩ŠŻ¼│╠ą“ųą▓╔ė├Ęe╦ŃČ©ĢrŲ„T246×ķ├}ø_░l╔·Ų„Ż¼ę“ŽĄĮy┼õų├Ą─PLC×ķ└^ļŖŲ„▌ö│÷ŅÉą═Ż¼Ųõ═©öÓŅl┬╩▀^Ė▀ėą┐╔─▄ōpē─
PLC┐žųŲŲ„
X0×ķONĢrŻ¼▌ö│÷š²├}ø_┴ąŻ¼▓Į▀MļŖÖCš²▐DĪŻ«öX0×ķONĢrŻ¼T246ęįD0ųĄ×ķŅAų├ųĄķ_╩╝ėŗĢrŻ¼ĢrķgĄĮŻ¼T246ī¦═©Ż¼ł╠ąąDECOųĖ┴ŅŻ¼Ė∙ō■D1öĄųĄŻ©╩ū┤╬×ķ0Ż®Ż¼ųĖČ©M10▌ö│÷Ż¼Y0ĪóY4×ķONŻ¼▓Į▀MļŖÖCAŽÓ═©ļŖŻ¼ŪęīŹ¼FļŖ┴„ĘĮŽ“A+Ī·A-Ż╗D1╝ė1Ż¼╚╗║¾Ż¼T246±R╔ŽūįąąÅ═╬╗Ż¼ųžą┬ėŗĢrŻ¼ĢrķgĄĮŻ¼T246ėųī¦═©Ż¼į┘ł╠ąąDECOųĖ┴ŅŻ¼Ė∙ō■D1öĄųĄŻ©┤╦┤╬×ķ1Ż®Ż¼ųĖČ©M11▌ö│÷Ż¼Y1ĪóY5×ķONŻ¼▓Į▀MļŖÖCBŽÓ═©ļŖŻ¼ŪęīŹ¼FļŖ┴„ĘĮŽ“B+Ī·B-Ż╗D1╝ė1Ż¼T246±R╔ŽėųūįąąÅ═╬╗Ż¼ųžą┬ėŗöĄŻ¼ĢrķgĄĮŻ¼T246ėųī¦═©Ż¼į┘ł╠ąąDECOųĖ┴ŅŻ¼Ė∙ō■D1öĄųĄŻ©┤╦┤╬×ķ2Ż®Ż¼ųĖČ©M12▌ö│÷Ż¼Y2ĪóY6×ķONŻ¼▓Į▀MļŖÖCAŽÓ═©ļŖŻ¼ŪęīŹ¼FļŖ┴„ĘĮŽ“A-Ī·A+Ż╗D1╝ė1Ż¼T246±R╔ŽėųūįąąÅ═╬╗Ż¼ųžą┬ėŗĢrŻ¼ĢrķgĄĮŻ¼T246ėųī¦═©Ż¼į┘ł╠ąąDECO├³┴ŅŻ¼Ė∙ō■D1öĄųĄŻ©┤╦┤╬×ķ3Ż®Ż¼ųĖČ©M13▌ö│÷Ż¼Y3ĪóY7×ķONŻ¼▓Į▀MļŖÖCBŽÓ═©ļŖŻ¼ŪęīŹ¼FļŖ┴„ĘĮŽ“B-Ī·B+Ż╗«öM13×ķONŻ¼D1Å═╬╗Ż¼ųžą┬ķ_╩╝ą┬ę╗▌åš²├}ø_ŽĄ┴ąĄ─«a╔·ĪŻ
X1×ķONĢrŻ¼▌ö│÷Ę┤├}ø_┴ąŻ¼▓Į▀MļŖÖCš²▐DĪŻ«öX1×ķONĢrŻ¼T246ęįD0ųĄ×ķŅAų├ųĄķ_╩╝ėŗĢrŻ¼ĢrķgĄĮŻ¼T246ī¦═©Ż¼ł╠ąąDECOųĖ┴ŅŻ¼Ė∙ō■D1öĄųĄŻ©╩ū┤╬×ķ0Ż®Ż¼ųĖČ©M10▌ö│÷Ż¼Y3ĪóY7×ķONŻ¼▓Į▀MļŖÖCBŽÓ═©ļŖŻ¼ŪęīŹ¼FļŖ┴„ĘĮŽ“B-Ī·B+Ż╗ę└┤╦ŅÉ═ŲŻ¼═Ļ│╔īŹ¼FAŽÓĘ┤ĘĮŽ“ļŖ┴„ĪóBŽÓš²ĘĮŽ“ļŖ┴„ĪóAŽÓš²ĘĮŽ“ļŖ┴„╚²éĆ├}ø_┴ą▌ö│÷Ż╗«öM13×ķONŻ¼D1Å═╬╗Ż¼ųžą┬ķ_╩╝ą┬ę╗▌åš²├}ø_ŽĄ┴ąĄ─«a╔·ĪŻ
«öX2×ķONĢrŻ¼│╠ą“ė╔ūįäė▐D×ķ╩ųäė─Ż╩ĮŻ¼«öX0Ż©X1Ż®×ķONĢrŻ¼├┐³cäėę╗┤╬X3Ż¼ī”D1öĄųĄŻ©╩ū┤╬×ķ0Ż®╝ė1Ż¼ĘųäeųĖČ©M10ĪóM11ĪóM12╝░M13▌ö│÷Ż¼Å─Č°═Ļ│╔ę╗▌åš²Ż©Ę┤Ż®├}ø_ŽĄ┴ąĄ─«a╔·ĪŻ
Ą┌73▓ĮųąŻ¼«öX4×ķONŻ¼M8012×ķONŻ¼M4×ķONŻ¼ŪęD0«öŪ░ųĄ
┴∙Īó│╠ą“š{įć╝░ł╠ąą
š{╦┘Ģr░┤X4╗“X5░┤ŌoŻ¼ė^▓ņD0Ą─ūā╗»Ż¼«öūā╗»ųĄ×ķ╦∙ąĶ╦┘Č╚ĢrßīĘ┼ĪŻ
╚ńäėū„Ūķør┼c┐žųŲę¬Ū¾ę╗ų┬▒Ē├„│╠ą“š²┤_Ż¼▒Ż┤µ│╠ą“ĪŻ╚ń╣¹░l¼F│╠ą“▀\ąą┼c┐žųŲę¬Ū¾▓╗Ę¹Ż¼æ¬ūą╝ÜĘų╬÷Ż¼šę│÷įŁę“Ż¼ųžą┬ą▐Ė─Ż¼ų▒ĄĮ│╠ą“┼c┐žųŲę¬Ū¾ŽÓĘ¹×ķų╣ĪŻ
Ų▀ĪóīŹė¢╦╝┐╝ŠÜ┴ĢŅ}
╚ń╣¹š{╦┘ąĶĮø│Ż▀MąąŻ¼┐╔īóD0Ą─ā╚╚▌’@╩Š│÷üĒŻ¼įćįOŽļĘĮ░ĖŻ¼ą▐Ė─│╠ą“Ż¼▓óīŹ“×ĪŻ
DECOPųĖ┴Ņšf├„Ż¼ZRSTģ^ķgÅ═╬╗ųĖ┴Ņ
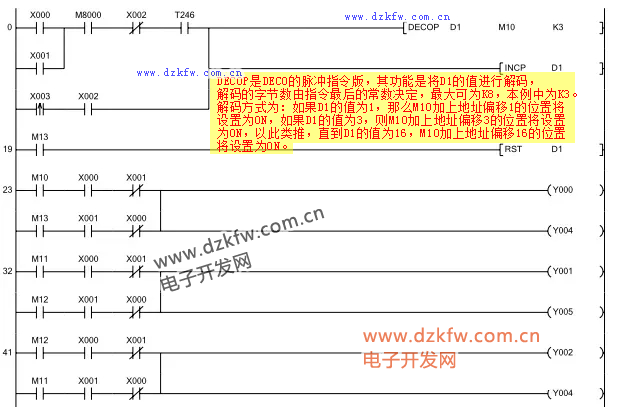
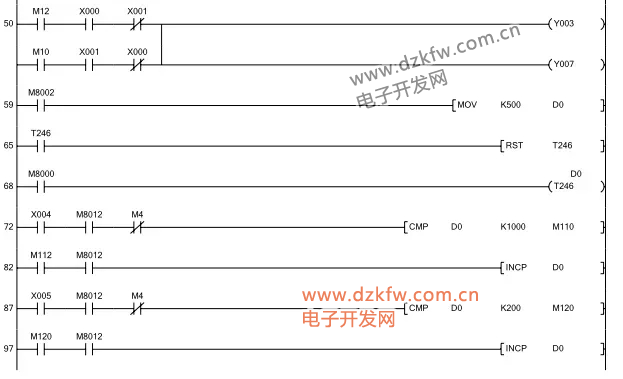
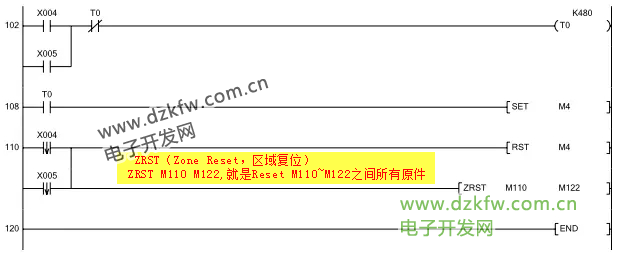
łD3-7 ▓Į▀MļŖÖCš²Ę┤▐D║═š{╦┘┐žųŲ
│╠ą“šf├„
1Īó▓Į¾E0Ż¼ųĖČ©├}ø_ą“┴ą▌ö│÷Ēśą“ęŲ╬╗ųĄŻ╗
2Īó«öX0×ķONŻ¼▌ö│÷š²├}ø_ą“┴ąŻ¼ļŖÖCš²▐DŻ╗«öX1×ķONŻ¼▌ö│÷žō├}ø_ą“┴ąŻ¼ļŖÖCĘ┤▐DŻ╗
3Īó«öX2×ķONŻ¼│╠ą“ė╔ūįäė▐D×ķ╩ųäė─Ż╩ĮŻ¼ė╔X3ĀŅæBå╬▓Įė|░lļŖÖC▀\▐DŻ╗
4Īó«öX4×ķONŻ¼╚ńD0ąĪė┌1000Ż¼├┐100msī”D0╝ė1Ż¼Å─Č°čėķL├┐├}ø_▌ö│÷Ą─ĢrķgķgĖ¶Ż¼ĮĄĄ═ļŖÖCĄ─▐D╦┘Ż╗
5Īó«öX5×ķONŻ¼╚ńD0┤¾ė┌200Ż¼├┐100msī”D0£p1Ż¼Å─Č°┐sČ╠├┐├}ø_▌ö│÷Ą─ĢrķgķgĖ¶Ż¼╝ė┐ņļŖÖCĄ─▐D╦┘Ż╗
6ĪóT0×ķŅl┬╩š{š¹Ž▐ųŲĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū