
╔ŽÄū┤╬╬ęéā╠ߥĮ┴╦╚²┴ŌPLCĄ─▀\äė┐žųŲųĖ┴Ņ╩╣ė├šf├„Ż¼Į±╠ņüĒšfŽ┬▀@ą®ųĖ┴Ņ╣”─▄Ą─ģ^(q©▒)äeęį╝░╩╣ė├ł÷║ŽĪŻų„ę¬ėąPLSYĪóPLSRĪóPLSVĪóDRVIĪóDRVA╬ÕéĆųĖ┴ŅĄ─▓╗═¼ĪŻ
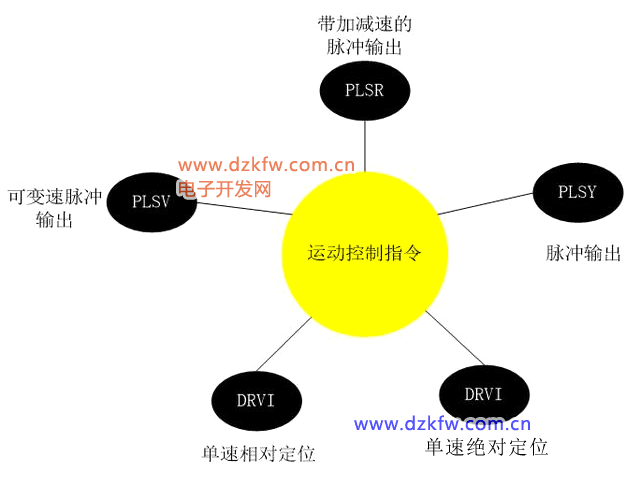
╚²┴Ō▀\äė┐žųŲųĖ┴Ņ
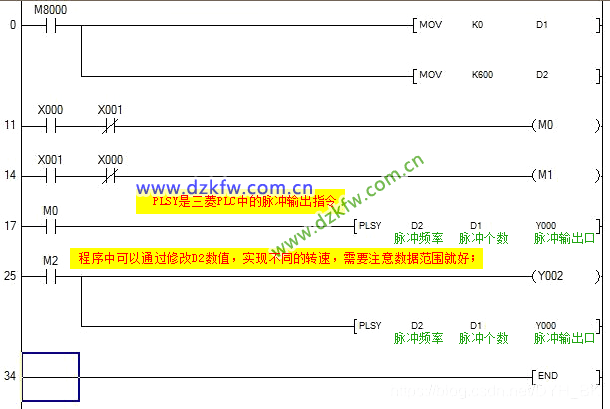
1PLSY├}ø_▌ö│÷
ųĖ┴ŅšZŠõ PLSY S1 S2 D1 S1╩ŪųĖČ©Ņl┬╩Ż¼S2╩Ū├}ø_öĄ┴┐Ż¼D1╩Ū├}ø_▌ö│÷Č╦┐┌Ż¼Å─▀@éĆųĖ┴Ņ┐┤│÷ø]ėąą²▐DĘĮŽ“┐žųŲ╗“š▀šfĘĮŽ“▓╗─▄ūįäėūRäeŻ¼į┌īŹļH▀\▐DųąąĶę¬ųĖ┴ŅĘĮŽ“Ż¼╦³Ą─├}ø_╝─┤µŲ„╩Ū└█ėŗą═Ą─Š═╩Ūšf¤ošōš²Ę┤▐D├}ø_öĄ┴┐Č╝╩Ūį÷Ą─▓╗ļSų°ą²▐DĘĮŽ“Ą─Ė─ūā▀Mąąį÷£pėŗöĄŻ¼▀@śėŠ═øQČ©┴╦ųĖ┴ŅųąöÓ║¾ø]ėą╬╗ų├ėøæøĪŻųĖ┴Ņį┌OFF║¾į┘┤╬ONĢr║“Å─ūŅ│§Ą─ķ_╩╝Ż¼ęŌ╦╝Š═╩Ūšf╬ęę¬ū▀2000éĆ├}ø_Ż¼ū▀ĄĮ1000═╗╚╗ųĖ┴ŅųąöÓŻ¼ųžą┬ON║¾Ż¼ėųąĶę¬ū▀2000éĆ▓┼═ŻŽ┬üĒĪŻąĶę¬ūóęŌĄ─╩ŪųĖ┴Ņł╠(zh©¬)ąąųąą▐Ė─S1ėąą¦Ż¼S2¤oą¦Ż¼ąĶꬎ┬┤╬ł╠(zh©¬)ąąėąą¦Ż¼ųĖ┴ŅųąöÓ║¾┴ó╝┤═Żų╣├}ø_▌ö│÷ø]ėą╝ė£p╦┘ĪŻ┐╔ęį┐┤│÷▀@ų╗╩Ūę╗éĆ║åå╬Ą─Č©╬╗ųĖ┴ŅŻ¼╚▒³cŻ║
(1)ą²▐DĘĮŽ“▓╗ūįäėūRäeŻ¼ąĶę¬ųĖČ©
(2)ø]ėą╬╗ų├ėøæø╣”─▄
(3)ø]ėą╝ė£p╦┘╣”─▄
PLSYīŹ└²
2ĪóPLSR╝ė£p╦┘├}ø_▌ö│÷
ųĖ┴ŅšZŠõ PLSR S1 S2 S3 D1,ŽÓ▒╚ė┌PLSYŻ¼PLSRųĖ┴ŅČÓ┴╦ę╗éĆ╝ė£p╦┘ĢrķgS3,į┌▌ö│÷├}ø_ĢrŻ¼┐╔ęį▀Mąą╝ė£p╦┘├}ø_▌ö│÷Ż¼Ųõ╦¹Č╝ę╗śėĪŻ┤╦═ŌöĄō■S1 S2ųĖ┴Ņ▀\ąąųąą▐Ė─¤oą¦Ż¼į┌Ž┬ę╗┤╬Ą─ųĖ┴Ņ“īäėĢrŻ¼Ė³Ė─ā╚╚▌ėąą¦Ż¼
3ĪóPLSV┐╔ūā╦┘├}ø_▌ö│÷
ųĖ┴ŅšZŠõPLSV S1 D1 D2Ż¼S1╩Ū├}ø_Ņl┬╩Ż¼D1╩Ū├}ø_▌ö│÷Č╦Ż¼D2╩Ūą²▐DĘĮŽ“▌ö│÷Ż¼Å─ųĖ┴Ņ┐┤│÷╦³Ą─ą²▐DĘĮŽ“▓╗ąĶę¬ųĖČ©Ż¼─▄ē“ūįäė▌ö│÷ą²▐DĘĮŽ“Ż¼ø]ėąųĖČ©Ą─Č©╬╗╣”─▄Ż¼Ą½┐╔ęįÅ─├}ø_╝─┤µŲ„½@Ą├╬╗ų├ą┼ŽóŻ¼ūóęŌŻ║a.S1Ą─ųĄ┐╔įOų├×ķžō b.ųĖ┴Ņ▀\ąąųą┐╔Ė─ūāS1Ņl┬╩Ą─ųĄ(╠žäeūóęŌį┌ōQĘ¹╠¢ĢrąĶꬎ╚īóS1įO×ķ0į┘ą▐Ė─Ż¼▒╚╚ńŅl┬╩ėą+200Ė─×ķ-500Ż¼▒žĒÜꬎ╚īóųĄėą200įOų├×ķ0į┘ė╔0Ė─×ķ-500)Ż¼c.├}ø_╝─┤µŲ„Ą─į÷£pėŗöĄė╔S1Ą─Ę¹╠¢øQČ©Ż¼═¼śėą²▐DĘĮŽ“ę▓╩ŪŻ¼d.┐╔═©▀^ų├╬╗╠ž╩Ō▌oų·└^ļŖŲ„M8338╝ż╗Ņ╝ė£p╦┘╣”─▄Ż¼╝ė£p╦┘═©▀^╠ž╩ŌöĄō■╝─┤µŲ„įOų├═Ļ│╔Ż¼į┌ė÷ĄĮųĖ┴ŅöÓķ_Īóš²Ę┤▐DśOŽ▐ś╦ųŠ£p╦┘═Żų╣ĪŻ
ŽÓ▒╚ė┌PLSYĪóPLSRČ°čįŻ¼PLSVĦėą╝ė£p╦┘╣”─▄Ż¼ą²▐DĘĮŽ“┐╔┐žŻ¼Š▀ėą╬╗ų├ėøæøŻ¼į┌Č©╬╗ąĶę¬ėŗ╦Ń─┐ś╦╬╗ų├Ą─ŠÓļx┼cĘĮŽ“ĪŻ
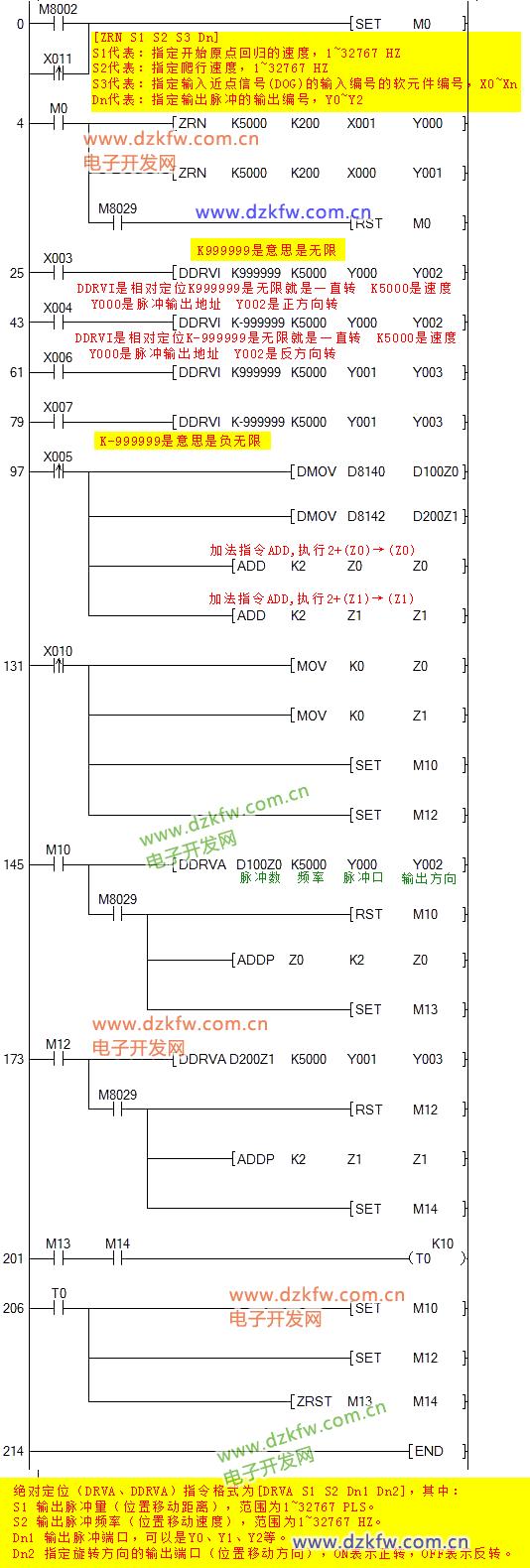
4ĪóDRVIŽÓī”å╬╦┘Č©╬╗
ųĖ┴ŅšZŠõDRVI S1 S2 D1 D2Ż¼S1╩Ū▌ö│÷├}ø_(ŽÓī”╬╗ų├)Ż¼S2╩Ū├}ø_Ņl┬╩Ż¼D1├}ø_▌ö│÷Č╦┐┌Ż¼D2╩Ūą²▐DĘĮŽ“▌ö│÷Ż¼Å─▀@ŚlųĖ┴Ņ┐┤│÷Ż¼─▄ē“Č©╬╗Ż¼ĘĮŽ“▓╗ę¬ųĖČ©─▄ūįäė▌ö│÷ą²▐DĘĮŽ“ĪŻ╦³─▄ē“▌ö│÷ųĖČ©Ą─├}ø_Ż¼├}ø_┐╔ęį╩Ūš²Ą─ę▓┐╔ęį╩ŪžōĄ─Ż¼├}ø_öĄ×ķš²š²é„D2╩ŪONĀŅæB(t©żi)Ż¼├}ø_╝─┤µŲ„į÷ėŗöĄŻ¼├}ø_öĄ×ķžōĘ┤▐DŻ¼£pėŗöĄŻ¼D2╩ŪOFFĀŅæB(t©żi)ĪŻ═¼śėŠ▀ėą╝ė£p╦┘╣”─▄ĪŻ
į┌▀@└’ę¬├„░ūŽÓī”╬╗ų├┼cĮ^ī”╬╗ų├Ą─ģ^(q©▒)äeŻ¼║åå╬šfŽÓī”╬╗ų├šfĄ─╩Ū▀^│╠Ż¼Į^ī”╬╗ų├ųĖĄ─╩Ū─┐Ą─Ż¼▒╚╚ńŻ║
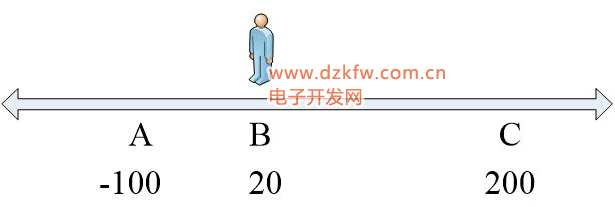
╬╗ų├
╝┘įO1¼F(xi©żn)į┌╠Äė┌BĄž³cū°ś╦╩Ū20Ż¼¼F(xi©żn)į┌═∙AĄž³c(-100)Ą─╬╗ų├ū▀Ż║
▓╔ė├ŽÓī”╬╗ų├Ż¼─ŃąĶę¬ėŗ╦ŃABĄ─ķgŠÓ-120Ż¼ätS1├}ø_▌ö│÷-120
▓╔ė├Į^ī”╬╗ų├Ż¼─Ńų╗ąĶę¬▌ö╚ļAĄ─ū°ś╦-100,ätS1├}ø_▌ö│÷-100
2╝┘įOÅ─BĄĮCĄž³cŻ║
▓╔ė├ŽÓī”╬╗ų├Ż¼─ŃąĶę¬ėŗ╦ŃABĄ─ķgŠÓ180Ż¼ätS1├}ø_▌ö│÷180
▓╔ė├Į^ī”╬╗ų├Ż¼─Ńų╗ąĶę¬▌ö╚ļAĄ─ū°ś╦200,ätS1├}ø_▌ö│÷200.
5ĪóDRVAĮ^ī”å╬╦┘Č©╬╗
ųĖ┴ŅšZŠõDRVAS1 S2 D1 D2Ż¼╗∙▒Š┼cDRVI▓Ņ▓╗ČÓŻ¼ģ^(q©▒)äeėąā╔³cŻ║
1Š═╩ŪS1▓╔ė├Į^ī”╬╗ų├Č©╬╗
2,ą²▐DĘĮŽ“Ą─▌ö│÷┼c├}ø_╝─┤µŲ„Ą─į÷£pėŗöĄŻ¼▓╔ė├─┐ś╦╬╗ų├┼c«öŪ░╬╗ų├Ą─Ą─▓ŅųĄøQČ©Ż¼▓ŅųĄ×ķš²Ż¼š²▐D╝─┤µŲ„į÷ėŗöĄŻ¼▓ŅųĄ×ķžōĘ┤▐DŻ¼╝─┤µŲ„£pėŗöĄĪŻ
╚²┴Ōplc“īäė╦┼Ę■ļŖÖC┐žųŲ╩Š└²
6Īó┐éĮY
▀\äė┐žųŲųĖ┴Ņ┤¾ų┬Ęų×ķš{╦┘ĪóČ©╬╗ĘųŅÉŻ¼ų╗▓╗▀^é╚ųž³c▓╗ę╗śėŻ¼PLSYĪóPLSV─▄īŹ¼F(xi©żn)ųĖ┴Ņ▀\ąąųąūā╦┘Ż¼PLSRų╗─▄īŹ¼F(xi©żn)▀\ąą╝ė£p╦┘(åóäė╝ė╦┘Īó£p╦┘═Żų╣)Ż¼PLSVĪóDRVIĪóDRVA┐╔īŹ¼F(xi©żn)╚╬ęŌ£p╦┘═Żų╣ĪŻPLSYĪóDRVIĪóDRVAŠ▀ėąā╚ų├Č©╬╗╣”─▄Ż¼Ą½PLSYø]ėą╬╗ų├ėøæø╣”─▄Ż¼PLSVĄ─Č©╬╗╣”─▄ąĶę¬Ė∙ō■├}ø_╝─┤µŲ„īŹ¼F(xi©żn)Č©╬╗ĪŻ
┐éĄ─üĒšfŻ¼╚ń╣¹▀\äėųąūā╦┘ę¬Ū¾Ė▀▀xė├PLSYĪóPLSVųĖ┴ŅŻ¼
╚ń╣¹ę¬Ū¾Č©╬╗ę¬Ū¾▌^Ė▀Ūę▀\äėŅlĘ▒ätąĶę¬▀xė├DRVI┼cDRVAųĖ┴ŅĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū