
01īŹ¼F╣”─▄ĮķĮB
1. ĮķĮB╚²┴ŌPLCČ©╬╗┐žųŲĄ─ę╗ą®│Żė├╠ž╩Ō╝─┤µŲ„
2. ĮķĮB╚²┴ŌPLC╗žįŁ³cĄ─Č■ĘNĘĮ╩Į
3. ╚²┴ŌPLCįŁ³c╗žÜw│╠ą“ŠÄīæ
02ė▓╝■įOéõ
1. FX3U-MT/ESS

2. MR-JE-10A

03▄ø╝■
1. GX Work2
2. MR Configurator2
04Č©╬╗│ŻęŖ╠ž╩Ō╝─┤µŲ„ĮķĮB
ę╗Īó╠ž╩Ō▌oų·└^ļŖŲ„
ŽÓĻP╠ž╩Ō▌oų·└^ļŖŲ„╚ńŽ┬▒Ē╦∙╩ŠĪŻY000ĪóY001ĪóY002ĪóY003×ķ├}ø_▌ö│÷Č╦▄øį¬╝■ĪŻ

1.į┌īŹļHŠÄ│╠▀^│╠ĘNŻ¼░čM8029║═M8329īæį┌Č©╬╗ųĖ┴Ņ║¾├µŻ¼üĒ┼ąöÓ▀@ŚlČ©╬╗ųĖ┴Ņ╩Ūʱš²│Ż═Ļ│╔Ż¼Č©╬╗ųĖ┴Ņš²│Ż▀\ąą═Ļ│╔Ż¼m8029Ģ■ī¦═©ę╗éĆÆ▀├Ķų▄Ų┌Ż¼Ę┤ų«m8329Ģ■ī¦═©ę╗éĆÆ▀├Ķų▄Ų┌ĪŻ
2.├}ø_▌ö│÷ųą▒O┐ž│Żė├ė┌▒O┐ž«öŪ░▌S╩Ūʱ╠Äė┌▀\äėĀŅæBĪŻ
3.įŁ³c╗žÜwĘĮŽ“ųĖČ©ė├üĒĖ─ūā«öŪ░▌S╗žįŁ³cĄ─ĘĮŽ“Ż¼«ö░l¼F╗žįŁ³cĘĮŽ“▓╗╩ŪīŹļHąĶę¬╗žįŁ³cĄ─ĘĮŽ“Ż¼Ė─ūā▀@éĆ╠ž╩Ō└^ļŖŲ„ĪŻ
4.š²▐DśOŽ▐║═Ę┤▐DśOŽ▐Ż¼ę╗░Ń╩Ūė├═Ō▓┐śOŽ▐é„ĖąŲ„Ą─X³cüĒ“īäėĪŻ
Č■Īó╠ž╩ŌöĄō■╝─┤µŲ„
ŽÓĻP╠ž╩ŌöĄō■╝─┤µŲ„╚ńŽ┬▒Ē╦∙╩ŠĪŻY000ĪóY001ĪóY002ĪóY003×ķ├}ø_▌ö│÷Č╦▄øį¬╝■ĪŻ

1. «öŪ░ųĄ╝─┤µŲ„D8340ė├üĒėøõø«öŪ░├}ø_▌S╬╗ų├Ż¼│Żė├ė┌DMOVé„╦═ĄĮŲõ╦¹╝─┤µŲ„Ż¼ūóęŌ╝─┤µŲ„ę¬ķgĖ¶╩╣ė├Ż¼š╝ė├32╬╗Ż¼─┐Ą─╩Ū×ķ┴╦ėøõøĖ³┤¾Ą─öĄō■Ż¼╚ń╣¹╝─┤µŲ„▀Bų°╩╣ė├Ż¼Ģ■įņ│╔╝─┤µŲ„ų«ķgöĄō■ø_═╗Ż¼ī¦ų┬öĄō■«É│Ż
2. ╗∙Ąž╦┘Č╚D8342Ż¼ė├ė┌įOČ©«öŪ░├}ø_▌S╗žįŁ³cĄ─╗∙Ąž╦┘Č╚Ż¼╩Ū«öŪ░├}ø_▌SĄ─ę╗éĆūŅĄ═╦┘Č╚ĪŻ
3. įŁ³c╗ž▀^╦┘Č╚D8346ė├ė┌įOČ©ę╗éĆ╗žįŁ³cĄ─ę╗éĆ╦┘Č╚ĪŻ
4. ┼└ąą╦┘Č╚D8345Ż¼╩Ū├}ø_▌S▀\ąą┴╦╗žįŁ³c╦┘Č╚║¾«ö┼÷ĄĮįŁ³c║¾Ż¼ėąę╗éĆ£p╦┘▀^│╠Ż¼ŪąōQ│╔┼└ąą╦┘Č╚Ż¼╚╗║¾į┌ļxķ_įŁ³cĄ─Ģr║“Ż¼═Żų╣├}ø_▌SŻ¼▓óī”«öŪ░├}ø_▌S╬╗ų├ŪÕ┴ŃĪŻ
5. ╝ė£p╦┘ĢrķgĄ─įOČ©╩Ū×ķ┴╦▌Såóäė║═▌S═Żų╣Ą─Ģr║“Ż¼ėąę╗éĆŲĮ╗¼Ą─▀^Č╔ĪŻ
05įŁ³c╗žÜwųĖ┴Ņ┼e└²
ę╗ĪóZRNųĖ┴Ņ
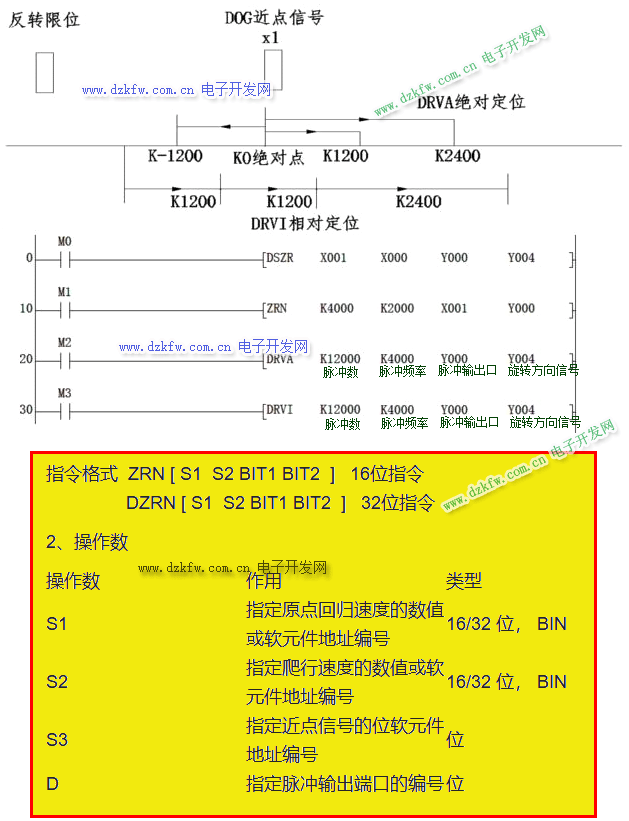
1ĪóųĖ┴ŅĖ±╩Į ZRN S1 S2 S3 D
S1Ż║ųĖ┴Ņķ_╩╝įŁ³c╗žÜwĄ─╦┘Č╚
S2: ųĖ┴Ņ┼└ąą╦┘Č╚
S3Ż║ųĖČ©▌ö╚ļĮ³³cą┼╠¢Ą─▄øį¬╝■ŠÄ│╠
DŻ║ųĖČ©ę¬▌ö│÷├}ø_Ą─▌ö│÷
2Īó┼e└²
ZRN D0 D2 X1 Y0Ī¬░┤Ž┬X1åóäė║¾Ż¼Y0║¾░l│÷ęįD0×ķŅl┬╩Ą─╗žÜw╦┘Č╚Ż©═©│Ż▌^┐ņŻ®Ż¼ĄĮ▀_X1įŁ³cķ_ĻP╬╗ų├Ż¼ūā×ķęįD2×ķŅl┬╩Ą─┼└ąą╦┘Č╚Ż©ę╗░Ń▒╚▌^┬²Ż®ĄĮäé║├ļxķ_X1Ą─╬╗ų├║¾═ŻŽ┬Ż¼×ķÖCąĄįŁ³c║═│╠ą“įŁ³cųž║ŽŻ╗
3ĪóūóęŌ
D8340×ķėøõø«öŪ░├}ø_▌S«öŪ░╬╗ų├Ż¼╗ž┴Ń³c═Ļ│╔║¾D8340Ą─ųĄūįäėŪÕ┴ŃŻ╗├┐┤╬į┌ł╠ąą╗žįŁ³cĄ─Ģr║“Ż¼ąĶę¬▒ŻūC▌SĄ─«öŪ░╬╗ų├į┌įŁ³cĄ─š²ĘĮŽ“ĪŻ
ŽÓī”Į^ī”ųĖ┴Ņ│╠ą“┼e└²Ż║
╚²┴ŌPLCųĖ┴ŅĮ╠│╠DDRVI║═DDRVAĪóZRNĪóDZRNųĖ┴Ņė├Ę©īŹ└²
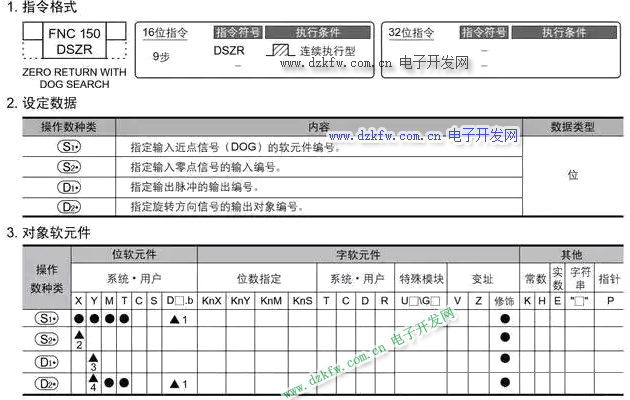
Č■ĪóDSZRųĖ┴Ņ
1ĪóųĖ┴ŅĖ±╩ĮDSZR S1 S2 D1 D2
S1Ż║Į³³c▌ö╚ļą┼╠¢ĪŻ
S2Ż║┴Ń³c▌ö╚ļą┼╠¢ĪŻ
D1Ż║├}ø_▌ö│÷Č╦ĪŻ
D2Ż║ļŖÖCą²▐DĘĮŽ“ą┼╠¢Ą─▌ö│÷Č╦ĪŻ
2Īó┼e└²
DSZR╩ŪĦDOG╦č╦„Ą─įŁ³c╗ž ÜwųĖ┴ŅŻ╗└²╚ń DSZR X0 X1 Y0 Y3Ż╗─Ū├┤X0╩ŪįŁ³cĮėĮ³ą┼╠¢Ż¼X1╩ŪįŁ╬╗ų├ą┼╠¢Ż¼Y0╩Ū├}ø_▌ö│÷ą┼╠¢Ż¼Y3╩ŪĘĮŽ“▌ö│÷ą┼╠¢ĪŻ
DSZR / ĦDOG╦č╦„Ą─įŁ³c╗žÜw
Ė┼꬯║
ł╠ąąįŁ³c╗žÜwŻ¼╩╣ÖCąĄ╬╗ų├┼c┐╔ŠÄ│╠┐žųŲŲ„ā╚Ą─«öŪ░ųĄ╝─┤µŲ„ę╗ų┬Ą─ųĖ┴ŅĪŻ
DOG╦č╦„╣”─▄Ą─ī”æ¬
į╩įS╩╣ė├Į³³cDOG║═┴Ń³cą┼╠¢Ą─įŁ³c╗žÜwŻ¼Ą½╩Ū▓╗┐╔ęįī”┴Ń³cą┼╠¢ėŗöĄ║¾øQČ©įŁ³cĪŻ

 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū