
步進電機和伺服電機,不同于三相異步電機,它們的主要作用是用作定位。也就是精確的確定工件的位置。步進電機 和伺服電機的選型,必須有電氣人員和結構人員以及工藝人員共同確定。由于伺服電機比步進電機價格、性能都要高,因此,必須根據實際的機械結構,工藝數據以及控制系統,選擇性價比最高的方案。也就是,在滿足需求的前提下,在保證可靠的情況下,降低成本。

-
1、根據軸數確定
這是選擇步進還是伺服的最基本原則,也是最容易被忽略的。對于伺服來說,由脈沖和通信兩種控制方式,而步進只有脈沖控制方式。因此,當控制軸數很多時,盡量選擇伺服,采用通信控制,這樣,無論是前期施工,還是后期維護都非常方便。一般四軸,最多六軸以內,都采用脈沖控制。而且現在PLC基本都標配四軸高速輸出,比如三菱FX5U,西門子S7-1200,歐姆龍CP1H等等。
-
2、根據節拍確定
該因素是關鍵,由于伺服和步進的自身特點,導致它們在應用上的差異。步進的加速時間在0.3到0.5秒之間,而伺服的加速時間只有幾毫秒。這些時間差異對于人類來說,幾乎沒區別,但對自動化設備來說確實至關重要。它對設備的整體節拍,有著至關重要的影響。小功率的日系伺服,額定轉速3000r/min,中大功率的伺服,額定轉速在1500到2000r/min。而極小慣量的歐系伺服,其額定轉速可以到達5000r/min,甚至9000r/min。而步進一般在500r/min左右。再加上機械結構的影響,所以,選擇步進還是伺服,直接決定了設備的節拍。
-
3、根據控制精度確定
步進電機的步距角是重要的因素,它直接決定了步進電機的精度。比如步距角0.18度的步進電機,給定一個脈沖,它就前進0.18度。這就是它所能達到的最低精度。因為不可能有半個脈沖。但是,步進都支持細分,采用各種算法,讓它的精度編程0.018度或是其它數值,但是不能無限制細分。而伺服電機的精度,是由它的編碼器決定的。比如,現在主流的日系伺服,其編碼器是21位,甚至22位。21位,也就是編碼器的精度2^21,把360度等分成2097152份,精度已經相當高了。這些,僅僅是電機能達到的精度,還要考慮機械的精度,比如減速機的反向間隙,絲杠的安裝和加工精度等等。一般說來,無論是步進還是伺服,都能實現0.1毫米的實際精度。
-
4、根據使用場合確定
主要是在一些特殊場合,由于步進電機可以做的更小,在一些空間狹窄的場合,需要使用步進電機。伺服電機最小的為200W,個別品牌有100W的產品,雖然體積比較小,但是在相同扭矩輸出下,步進電機可以做的更小。由于步進和伺服的差異,一般說來,伺服電機輸出端都是增加減速機構,而步進電機一般是直接輸出。
-
5、根據預算
相對于伺服電機來說,步進電機價格低廉,因此在滿足需求的前提下,應該盡可能使用步進。當然,如果一味追求價格,而忽視需求,那么,選用步進節省的成本,還不夠現場出問題的各種費用。
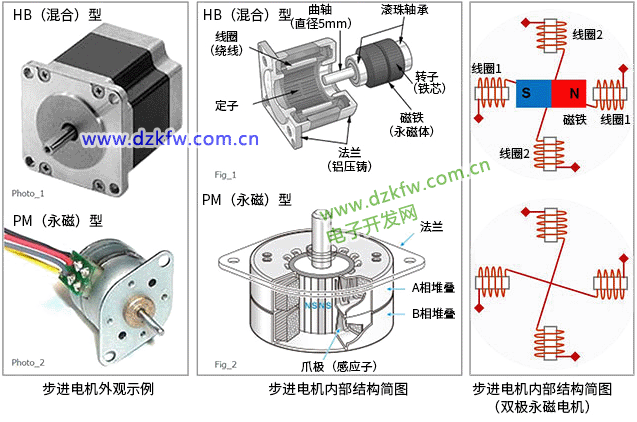
步進電機知識擴展:步進電機的相數:是指電機內部的線圈組數,目前常用的有二相、三相、四相、五相步進電機。電機相數不同,其步距角也不同,一般二相電機的步距角為0.9°/1.8°、三相的為0.75°/1.5°、五相的為0.36°/0.72° 。
保持轉矩:是指步進電機通電但沒有轉動時,定子鎖住轉子的力矩。它是步進電機最重要的參數之一,通常步進電機在低速時的力矩接近保持轉矩。
相數:產生不同對極N、S磁場的激磁線圈對數,是指電機內部的線圈組數,目前常用的有二相、三相、四相、五相步進電機。電機相數不同,其步距角也不同,一般二相電機的步距角為0.9°/1.8°、三相的為0.75°/1.5°、五相的為0.36°/0.72° 。在沒有細分驅動器時,用戶主要靠選擇不同相數的步進電機來滿足自己步距角的要求。如果使用細分驅動器,則‘相數’將變得沒有意義,用戶只需在驅動器上改變細分數,就可以改變步距角。目前應用最廣泛的是兩相和四相,四相電機一般用作兩相,五相的成本較高。
拍數:完成一個磁場周期性變化所需脈沖數或導電狀態用n表示,或指電機轉過一個齒距角所需脈沖數,以四相電機為例,有四相四拍運行方式即AB-BC-CD-DA-AB,四相八拍運行方式即 A-AB-B-BC-C-CD-D-DA-A.
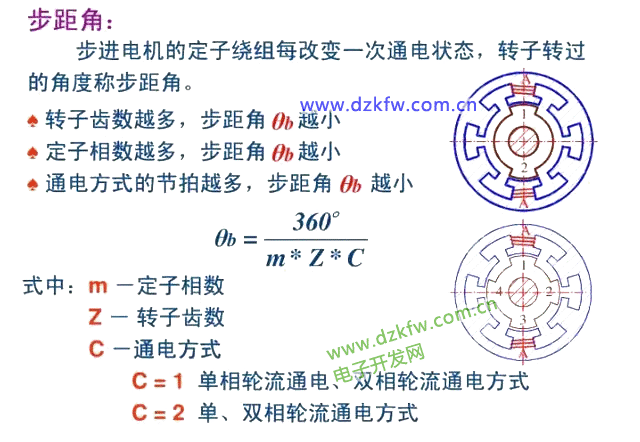
固有步距角:對應一個脈沖信號,電機轉子轉過的角位移用θ表示。θ=360度(轉子齒數J*運行拍數),以常規二、四相,轉子齒為50齒電機為例。四拍運行時步距角為θ=360度/(50*4)=1.8度(俗稱整步),八拍運行時步距角為θ=360度/(50*8)=0.9度(俗稱半步)。這個步距角可以稱之為‘電機固有步距角’,它不一定是電機實際工作時的真正步距角,真正的步距角和驅動器有關。
定位轉矩(DETENT TORQUE):電機在不通電狀態下,電機轉子自身的鎖定力矩(由磁場齒形的諧波以及機械誤差造成的),DETENT TORQUE 在國內沒有統一的翻譯方式,容易使大家產生誤解;由于反應式步進電機的轉子不是永磁材料,所以它沒有DETENT TORQUE。
最大靜轉矩:也叫保持轉矩(HOLDING TORQUE),電機在額定靜態電作用下(通電),電機不作旋轉運動時,電機轉軸的鎖定力矩,即定子鎖住轉子的力矩。此力矩是衡量電機體積(幾何尺寸)的標準,與驅動電壓及驅動電源等無關。通常步進電機在低速時的力矩接近保持轉矩。由于步進電機的輸出力矩隨速度的增大而不斷衰減,輸出功率也隨速度的增大而變化,所以保持轉矩就成為了衡量步進電機最重要的參數之一。比如,當人們說2N.m的步進電機,在沒有特殊說明的情況下是指保持轉矩為2N.m的步進電機。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底