
基礎(chǔ)實(shí)用入門(mén)的西門(mén)子S7-200PLC學(xué)習(xí)筆記
一、輸入信號(hào):I0.0-I0.7; I1.0-I1.7
二、輸出信號(hào):Q0.0-Q0.7; Q1.0-Q1.5
三、繼電器:M0.0-M31.7;共256位
四、時(shí)間繼電器(從T37開(kāi)始編):通電延時(shí)(TON)
有記憶的通電延時(shí)(TONR)
斷電延時(shí)(TOF)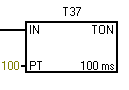
圖1
以圖1為例,IN為輸入信號(hào),TON表示這個(gè)時(shí)間繼電器是通電延時(shí),T37表示這個(gè)繼電器命名為T(mén)37,100ms是單位基數(shù), PT為延遲時(shí)間
時(shí)間繼電器延遲時(shí)間算法:PT時(shí)間單位基數(shù);圖1中延遲時(shí)間為100100ms=10000ms=10s
五、計(jì)數(shù)器(C0-C255):增計(jì)數(shù)器(CTU)
減計(jì)數(shù)器(CTD)
增減計(jì)數(shù)器(CTUD)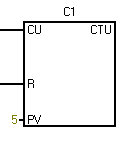
圖2
以圖2為例,C1表示這個(gè)計(jì)時(shí)器命名為C1,CTU表示這個(gè)計(jì)數(shù)器為增計(jì)數(shù)器,CU為觸發(fā)信號(hào),R為復(fù)位信號(hào),PV為計(jì)數(shù)次數(shù)
提示:1. 計(jì)數(shù)器CU端與R端不能存在or狀態(tài)
2.計(jì)數(shù)器要從最左端主線直接輸入信號(hào)
3.一個(gè)網(wǎng)絡(luò)里只能有一個(gè)計(jì)數(shù)器
六、上升沿(P):上升沿觸發(fā),當(dāng)輸入信號(hào)狀態(tài)由0—1則發(fā)生動(dòng)作,反之由1—0則不動(dòng)作
下降沿(N):下降沿觸發(fā),當(dāng)輸入信號(hào)狀態(tài)由1—0則發(fā)生動(dòng)作,反之由0—1則不動(dòng)作
七、特殊功能寄存器(SM):
SM0.0:使運(yùn)行時(shí)一直為1,是常ON繼電器,一般用在程序開(kāi)始最左側(cè)第一位置,辦證每次都掃描;
SM0.1:是CPU第一次上電運(yùn)行時(shí)動(dòng)作一次,也就是一個(gè)上升沿,一般作為初始故障復(fù)位使用;
SM0.2:當(dāng)機(jī)器執(zhí)行數(shù)學(xué)運(yùn)算結(jié)果為負(fù)時(shí),該位被置1;
SM0.3:開(kāi)機(jī)后進(jìn)入RUN方式,該位被置1一個(gè)掃描周期;
SM0.4:是以1min為周期的脈沖波形,可以作為計(jì)數(shù)器觸發(fā)使用;
SM0.5:是以1秒為周期的脈沖波形,可以作為計(jì)數(shù)器觸發(fā)使用;
SM0.6:為掃描時(shí)鐘脈沖,首次掃描為1,下次為0,在下次為1,以此類推;
SM1.0:當(dāng)執(zhí)行某些指令,其結(jié)果為0時(shí),將改位置為1;
SM1.1:當(dāng)執(zhí)行某些指令,其結(jié)果溢出或非法數(shù)值時(shí),將改位置為1;
SM1.2:當(dāng)執(zhí)行數(shù)學(xué)運(yùn)算指令,其結(jié)果為負(fù)數(shù)時(shí),將改位置為1;
SM1.3:試圖除以0時(shí),將改位置為1。
八、順序控制繼電器(S):
順序控制繼電器區(qū)為順序控制繼電器的數(shù)據(jù)而建立一個(gè)存儲(chǔ)區(qū),用S表示;可以按位、字節(jié)、字、雙字四種方式來(lái)存取。
(1)位:S0.0-S31.7,共256點(diǎn)
(2)字節(jié):SB0-SB31,共32字節(jié)
(3)字:SW0-SW30,共16字
(4)雙字:SD0-SD28,共8個(gè)雙字
注:程序中S上方是置位的起始位置,下方的數(shù)字是從起始位置開(kāi)始的總點(diǎn)數(shù),如圖三表示從Q0.0開(kāi)始置位三個(gè)點(diǎn)(Q0.0,Q0.1,Q0.2);R的上方下方表達(dá)意思與S一樣。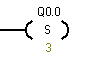
圖3
九、復(fù)位(R):用法與順序控制繼電器一樣,順序控制繼電器是置位,R為復(fù)位。
十、跳轉(zhuǎn)指令與標(biāo)簽指令
跳轉(zhuǎn)指令(JMP):在預(yù)置觸發(fā)信號(hào)接通時(shí),使程序跳轉(zhuǎn)到標(biāo)簽處執(zhí)行;
標(biāo)簽(LBL):標(biāo)記跳轉(zhuǎn)的目的地位置;
JMP與LBL指令上方的數(shù)字為對(duì)應(yīng)的位置,即當(dāng)JMP指令上方數(shù)字為n時(shí),接通時(shí)會(huì)自動(dòng)跳轉(zhuǎn)到相對(duì)應(yīng)的上方數(shù)字為n的LBL命令的位置來(lái)執(zhí)行程序,常用來(lái)切換兩個(gè)不同工作狀態(tài)下的不同的程序。
十一、高速計(jì)數(shù)器(HC)
用來(lái)累積比CPU的掃描速率更快的事件,計(jì)數(shù)過(guò)程與掃描周期無(wú)關(guān)。
十二、累加器(AC)
用來(lái)向子程序傳遞參數(shù)和從子程序返回參數(shù),或用來(lái)臨時(shí)保存中間的運(yùn)算結(jié)果。
十三、程序組織單元(POU)
將主程序、子程序和中斷程序統(tǒng)稱為程序組織單元(POU),各POU都有自己的64B的局部存儲(chǔ)器;使用梯形圖和功能模塊圖時(shí),將保留局部存儲(chǔ)器的最后4B。
十四、局部存儲(chǔ)器(L)、變量存儲(chǔ)器(V)
僅在它被創(chuàng)建的POU中有效,各POU不能訪問(wèn)別的POU的局部存儲(chǔ)器;變量存儲(chǔ)器(V)是全局存儲(chǔ)器,可以被所有的POU訪問(wèn)。
十五、模擬量輸入(AI)
AI模塊將連續(xù)變化的模擬量按比例轉(zhuǎn)換為一個(gè)字長(zhǎng)(16位)的數(shù)字量,用區(qū)域標(biāo)識(shí)符AI、表示數(shù)據(jù)長(zhǎng)度的W(字)和起始字節(jié)的地址來(lái)表示模擬量輸入的地址,例如AW16,模擬量輸入值為只讀數(shù)據(jù)。
十六、模擬量輸出(AQ)
AO模塊將長(zhǎng)度為一個(gè)字的數(shù)字轉(zhuǎn)換為現(xiàn)實(shí)世界的模擬量,用區(qū)域標(biāo)識(shí)符AQ、表示數(shù)據(jù)長(zhǎng)度W(字)和起始字節(jié)的地址來(lái)表示存儲(chǔ)模擬量輸出的地址,例如AQW32,模擬量輸出值是只寫(xiě)數(shù)據(jù),用戶不能讀取模擬量輸出值。
十七、使能輸入與使能輸出
梯形圖中,用方框鏢師某些指令,例如定時(shí)器和數(shù)學(xué)運(yùn)算指令,通常方框指令的輸入端在左邊,輸出端在右邊;能流從左至右,不能有短路、開(kāi)路和反方向的能流,前一個(gè)方框的輸出可以作為后一個(gè)方框的輸入。
十八、移位指令與循環(huán)移位指令
| 梯形圖 | 語(yǔ)句表 | 描述 |
|---|---|---|
| SHR_B | SRB OUT,N | 右移字節(jié) |
| SHL_B | SLB OUT,N | 左移字節(jié) |
| SHR_W | SRW OUT,N | 右移字 |
| SHL_W | SLW OUT,N | 左移字 |
| SHR_DW | SRD OUT,N | 右移雙字 |
| SHL_DW | SLD OUT,N | 左移雙字 |
表1、移位指令
| 梯形圖 | 語(yǔ)句表 | 描述 |
|---|---|---|
| ROR_B | RRB OUT,N | 循環(huán)右移字節(jié) |
| ROL_B | RLB OUT,N | 循環(huán)左移字節(jié) |
| ROR_W | RRW OUT,N | 循環(huán)右移字 |
| ROL_W | RLW OUT,N | 循環(huán)左移字 |
| ROR_DW | RRD OUT,N | 循環(huán)右移雙字 |
| ROL_DW | RLD OUT,N | 循環(huán)左移雙字 |
| SHRB | SHRB DATA,S BIT,N | 移位寄存器 |
表2、循環(huán)移位指令
十九、數(shù)據(jù)轉(zhuǎn)換指令
實(shí)現(xiàn)字節(jié)(B)與整數(shù)(I)、整數(shù)與雙整數(shù)(DI)、BCD碼與整數(shù)、雙整數(shù)(DI)與實(shí)數(shù)(R)之間的轉(zhuǎn)換指令,以及七段譯碼指令。
| 梯形圖 | 語(yǔ)句表 | 描述 |
|---|---|---|
| B_I | BTI IN,OUT | 字節(jié)轉(zhuǎn)換為整數(shù) |
| I_B | ITB IN,OUT | 整數(shù)轉(zhuǎn)換為字節(jié) |
| I_DI | ITD IN,OUT | 整數(shù)轉(zhuǎn)換為雙整數(shù) |
| DI_I | DTI IN,OUT | 雙整數(shù)轉(zhuǎn)換為整數(shù) |
| DI_R | DTR IN,OUT | 雙整數(shù)轉(zhuǎn)換為實(shí)數(shù) |
| I_BCD | IBCD OUT | 整數(shù)轉(zhuǎn)換為BCD碼 |
| BCD_I | BCDI OUT | BCD碼轉(zhuǎn)換為整數(shù) |
| ROUND | ROUND IN,OUT | 實(shí)數(shù)四舍五入為雙整數(shù) |
| TRUNC | TRUNC IN,OUT | 實(shí)數(shù)截位取整為雙整數(shù) |
| SEG | SEG IN,OUT | 段碼 |
| DECO | DECO IN,OUT | 解碼 |
| ENCO | ENCO IN,OUT | 編碼 |
表3、數(shù)據(jù)轉(zhuǎn)換指令
二十、時(shí)鐘指令
| 梯形圖 | 語(yǔ)句表 | 描述 |
|---|---|---|
| READ_RTC | TORD T | 讀取實(shí)時(shí)時(shí)鐘 |
| SET_RTC | TODW T | 設(shè)置實(shí)時(shí)時(shí)鐘 |
| READ_RTCX | TODRX T | 讀取擴(kuò)展實(shí)時(shí)時(shí)鐘 |
| SET_RTCX | TODWX T | 設(shè)置擴(kuò)展實(shí)時(shí)時(shí)鐘 |
表4、時(shí)鐘指令
例: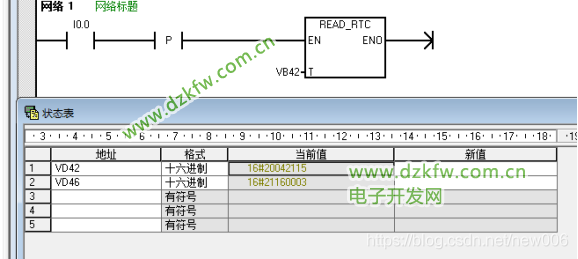
圖4
如圖4所示,表示在I0.0的上升沿讀取日期時(shí)間值,用VB42開(kāi)始的時(shí)間緩沖區(qū)保存讀取的值。將所編程序下載到PLC之后,打開(kāi)I0.0,可以在狀態(tài)表里監(jiān)控VD42和VD46中讀取的BCD碼值,圖中讀取的值為2020年4月21日15點(diǎn)21分16秒,星期二;
在星期的取值中,星期的取值范圍為07,1表示星期日,27表示星期一到星期六,為0時(shí)將禁用星期(保持為0)。
二十一、看門(mén)狗
CPU循環(huán)的循環(huán)監(jiān)視時(shí)間的開(kāi)始(500ms);程序執(zhí)行時(shí)間超過(guò)500ms或者進(jìn)入死循環(huán)時(shí)會(huì)報(bào)錯(cuò)。
二十二、過(guò)程映像區(qū)
在循環(huán)程序處理過(guò)程中,CPU需要一致的過(guò)程映像信號(hào)。為此在程序執(zhí)行之前讀取/寫(xiě)入過(guò)程信號(hào)。在隨后的程序處理中。CPU在對(duì)輸入(I)和輸出(Q)地址區(qū)尋址時(shí)不直接訪問(wèn)信號(hào)模塊,而是訪問(wèn)包含I/O過(guò)程映像的CPU系統(tǒng)存儲(chǔ)區(qū)。
二十三、主程序、子程序、中斷程序
主程序循環(huán)執(zhí)行,可以調(diào)用子程序;
子程序可以清晰的指出程序需要的功能,主程序中加入的子程序要先執(zhí)行子程序才能執(zhí)行下一段主程序,子程序中還可以調(diào)用子程序,一共可以調(diào)用8個(gè),想全部執(zhí)行完才能進(jìn)入下一段主程序;S7-200 CPU最多可以調(diào)用64個(gè)子程序(CPU226為128個(gè));子程序可以帶參數(shù)調(diào)用,在子程序的局部變量表中設(shè)置參數(shù)的類型,一共可以帶16個(gè)參數(shù)。
中斷程序:發(fā)生某一事件后執(zhí)行此程序;只能嵌一個(gè)子程序;中斷程序有不同的優(yōu)先級(jí),中斷程序不能再被打斷,會(huì)按照發(fā)生的時(shí)間順序和優(yōu)先級(jí)排隊(duì)。
二十四、如圖5,分別為:
取反
與
或
異或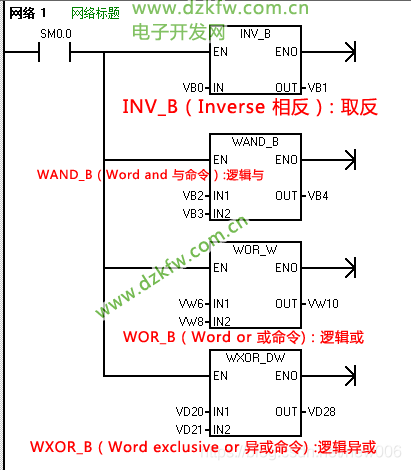
圖5
二十五、FOR/NEXT指令
每條FOR指令必須對(duì)應(yīng)一條NEXT指令;FOR/NEXT指令循環(huán)可嵌套深度可達(dá)8層;FOR指令用沿觸發(fā);循環(huán)結(jié)束,當(dāng)下一次允許時(shí),F(xiàn)OR/NEXT指令復(fù)位它自己,并把初始值拷貝到INDX中。
二十六、程序控制,順序控制
每條SCR指令必須對(duì)應(yīng)有SCRE結(jié)束之靈;
不能把同一個(gè)S位用于不同程序中,例如:如果在主程序中用了S0.1,在子程序中就不能再使用它;
在SCR段之間不能使用JMP和LBL指令,但可以在SCR段內(nèi)使用跳轉(zhuǎn)和標(biāo)號(hào)指令;SCR段之間的跳轉(zhuǎn),可以使用SCRT或復(fù)位/置位指令
在SCR段中不能使用END指令
二十七、程序控制其余指令
RET:根據(jù)前一個(gè)邏輯從子程序返回主程序;軟件自動(dòng)在子程序最后增加無(wú)條件返回。
END:根據(jù)前一個(gè)邏輯條件終止主程序;可以在主程序中使用“有條件結(jié)束”指令,但不能在子程序或中斷程序中使用;軟件自動(dòng)在主程序最后增加無(wú)條件結(jié)束。
STOP:重新將PLC轉(zhuǎn)換至STOP模式。
WDR:重新觸發(fā)CPU的看門(mén)狗定時(shí)器,擴(kuò)展掃描允許使用的時(shí)間,而不會(huì)出現(xiàn)看門(mén)狗錯(cuò)誤;慎用!!!
DIAG-LED:設(shè)置診斷LED燈;當(dāng)輸入?yún)?shù)IN的數(shù)值為零,則診斷LED會(huì)被設(shè)置為不發(fā)光。如果輸入?yún)?shù)IN的數(shù)值大于零,則診斷LED會(huì)被設(shè)置為發(fā)光(黃色)。
二十八、BGN-ITIME和CAL-ITIME指令可測(cè)量?jī)扇蝿?wù)的時(shí)間間隔,也可間接實(shí)現(xiàn)定時(shí)功能。
二十九、rs-485口MODBUS通訊
Modbus主站讀寫(xiě)程序
注意:1、Modbus RTU主站功能是通過(guò)指令庫(kù)中預(yù)先編好的程序功能塊實(shí)現(xiàn)的,該庫(kù)只針對(duì)Port0口有效
2、Modbus RTU主站使用了一些用戶中斷,在用戶程序中不能禁止中斷
3、此處訪問(wèn)的為一個(gè)從站,若訪問(wèn)不同的從站,可通過(guò)改變從站地址來(lái)實(shí)現(xiàn)
第一步初始化:復(fù)位modbus庫(kù)完成位,初始化完成后,啟動(dòng)讀寫(xiě)指令m0.1置位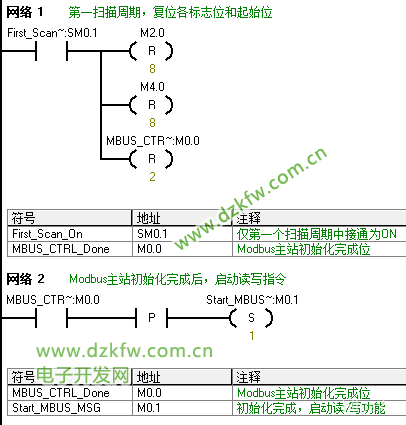
第二步:填寫(xiě)從站通訊參數(shù)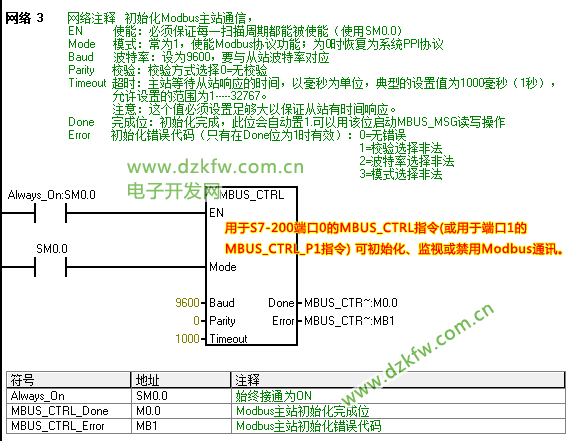
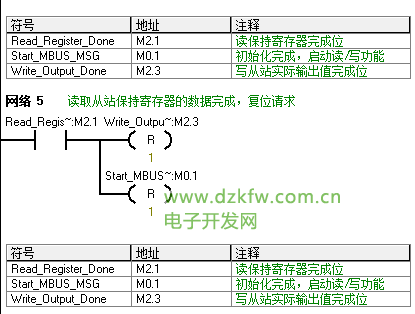
第三步:M0.1置位讀取從站數(shù)據(jù),讀取保持寄存器40001-40008 8個(gè)數(shù)據(jù)根據(jù)數(shù)據(jù)格式寫(xiě)入&VB1000,40001,40002為32位浮點(diǎn)數(shù),則保持在VB1000 VB1001 VB1002 VB1003中,依次類推,讀取完成M2.1置位,復(fù)位讀取從站保持寄存器MO.1 M2.3
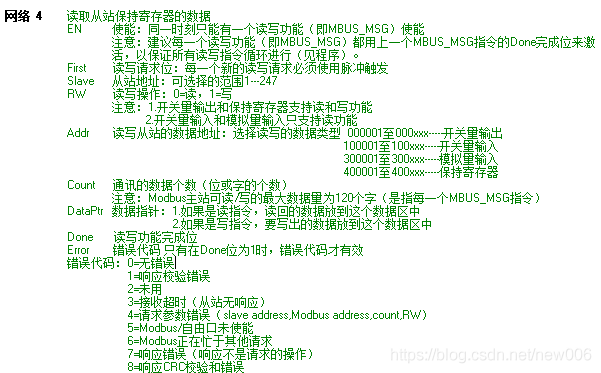
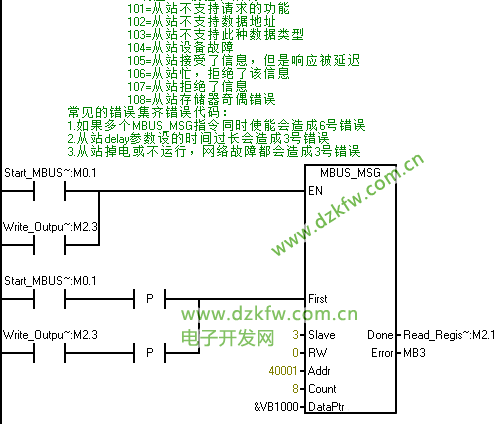
讀取輸入寄存器,讀取完成M2.2置位,復(fù)位M2.1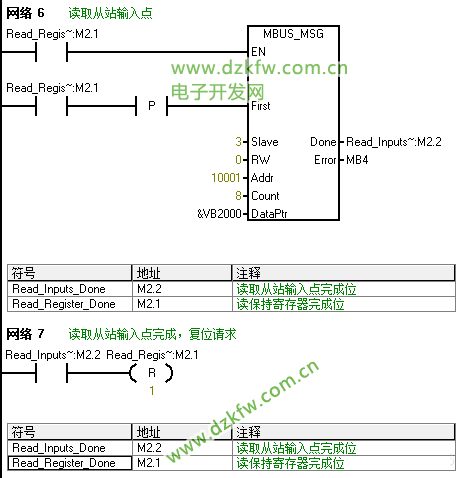
M2.2置位,寫(xiě)數(shù)據(jù)開(kāi)始,VB3000寫(xiě)入00001中,寫(xiě)完成,M2.3置位,開(kāi)始讀,M2.2復(fù)位。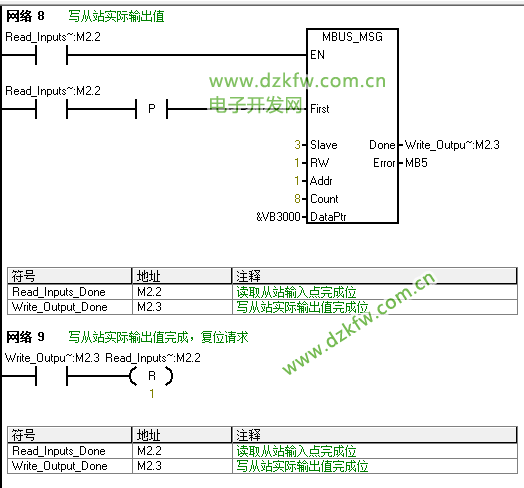
將程序?qū)懭隤LC,通過(guò)串口調(diào)試助手,PLC給電腦發(fā)送如下指令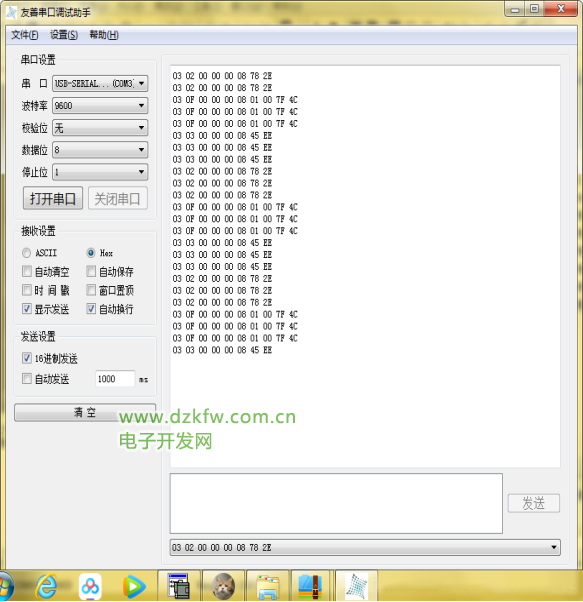
03 02 00 00 00 08 78 2E是PLC要讀取從站的輸入點(diǎn)
03 0F 00 00 00 08 01 00 7F 4C是PLC要寫(xiě)從站的輸入點(diǎn)
03 03 00 00 00 08 45 EE是PLC要讀從站的保持寄存器
三十、PLC為從站MODBUS通訊
PLC中各寄存器地址與MODBUS地址對(duì)照表
| 功能號(hào) | Modbus地址 | s7-200Plc地址 | 描述 |
|---|---|---|---|
| 0 | 00001—00128 | Q0.0—Q15.7 | Q輸出 |
| 00001 | Q0.0 | ||
| 00002 | Q0.1 | ||
| 00003 | Q0.2 | ||
| … | … | ||
| 00127 | Q15.6 | ||
| 00128 | Q15.7 | ||
| 1 | 10001—10128 | I0.0—I15.7 | I輸入 |
| 10001 | I0.0 | ||
| 10002 | I0.1 | ||
| 10003 | I0.2 | ||
| … | … | ||
| 10127 | I15.6 | ||
| 10128 | I15.7 | ||
| 3 | 30001—30032 | AIW0—AIW62 | AI模擬量輸入 |
| 30001 | AIW0 | ||
| 30002 | AIW2 | ||
| 30003 | AIW4 | ||
| … | … | ||
| 30031 | AIW60 | ||
| 30032 | AIW62 | ||
| 4 | 40001—4**** | T—T+2*(****-1) | V區(qū)(T為起始位) |
| 40001 | T | ||
| 40002 | T+2*(2-1) | ||
| 40003 | T+2*(3-1) | ||
| … | … |
三十一、SCR指令
SCR指令專門(mén)用于編制順序控制程序。順序控制程序被分為L(zhǎng)SCR與SCRE指令之間的若干個(gè)SCR段,一個(gè)SCR段對(duì)應(yīng)于順序功能圖中的一步。
一個(gè)SCR程序段一般有以下三種功能:
1)驅(qū)動(dòng)處理:在該段狀態(tài)有效時(shí),要做什么工作,有時(shí)也可能不做任何工作。
2)指定轉(zhuǎn)移條件和目標(biāo):滿足什么條件后狀態(tài)轉(zhuǎn)移到何處。
3)轉(zhuǎn)移源自動(dòng)復(fù)位功能:狀態(tài)發(fā)生轉(zhuǎn)移后,置位下一個(gè)狀態(tài)的同時(shí),自動(dòng)復(fù)位原狀態(tài)。
S7-200 PLC提供了三條順序控制指令:裝載SCR(LSCR)指令、SCR傳輸(SCRT)指令和SCR結(jié)束(SCRE)指令。如下圖所示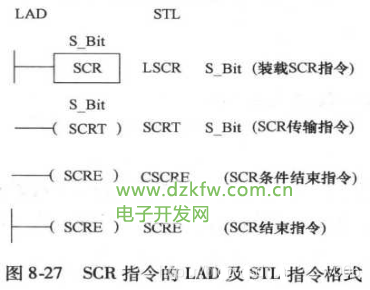
SCR指令的操作如下:
1)裝載SCR (LSCR,Load SCR)指令用來(lái)表示一個(gè)SCR段(即順序功能圖中的步)的開(kāi)始。指令中的操作數(shù)S—Bit為順序控制繼電器S(BOOL型)的地址,順序控制繼電器S為1狀態(tài)時(shí),執(zhí)行對(duì)應(yīng)的SCR段中的程序,反之則不執(zhí)行。
2) SCR傳輸(SCRT,SCR Transition)指令將程序控制權(quán)從一個(gè)激活的SCR段傳遞到另一個(gè)SCR段,即步的活動(dòng)狀態(tài)的轉(zhuǎn)換。執(zhí)行SCRT指令,當(dāng)SCRT線圈“得電”時(shí),SCRT指令中指定的順序功能圖中的后續(xù)步對(duì)應(yīng)的順序控制繼電器S位置位(變?yōu)?狀態(tài)),同時(shí)當(dāng)前活動(dòng)步對(duì)應(yīng)的順序控制繼電器S位被系統(tǒng)程序復(fù)位(變?yōu)?狀態(tài)),當(dāng)前步變?yōu)椴换顒?dòng)步。
在SCRT指令執(zhí)行時(shí),復(fù)位當(dāng)前激活的程序段的S位并不會(huì)影響S堆棧。SCR段會(huì)一直保持能流直到退出。
3) SCR結(jié)束(SCRE,SCR END)指令標(biāo)志著SCR段的結(jié)束。
使用SCR指令時(shí)有以下的限制:
1) SCR指令僅對(duì)元件S有效,順序控制繼電器S也具有一般繼電器的功能,所以對(duì)它能夠使用其他指令。
2)不能把同一個(gè)S位用于不同程序中,例如如果在主程序中使用了SO.1,則在子程序中就不能再使用它。
3)在SCR段中不能使用JMP和LBL指令,即不允許用跳轉(zhuǎn)的方法跳入或跳出SCR段;但可以在SCR段附近使用跳轉(zhuǎn)和標(biāo)號(hào)指令或者在段內(nèi)跳轉(zhuǎn)。
4)在SCR段中不能使用FOR、NEXT和END指令。
5)在狀態(tài)發(fā)生轉(zhuǎn)移后,所有的SCR段的元件一般也要復(fù)位,如果希望繼續(xù)輸出,可使用置位/復(fù)位指令。
6)在使用順序功能圖時(shí),SCR段的編寫(xiě)可以不按順序編排。
三十二、閉環(huán)控制與PID控制器
PID控制(即比例-積分-微分)優(yōu)點(diǎn):
1、即使沒(méi)有控制系統(tǒng)的數(shù)學(xué)模型,也能得到比較滿意的控制效果;
2、通過(guò)調(diào)用PID指令來(lái)編程,程序設(shè)計(jì)簡(jiǎn)單,參數(shù)調(diào)整方便;
3、有較強(qiáng)的靈活性和適應(yīng)性,根據(jù)被控對(duì)象的具體情況,可以采用P、PI、PD、和PID等方式,S7-200的PID指令還采用了一些改進(jìn)的控制方式。
模擬量閉環(huán)控制:
在模擬量閉環(huán)控制系統(tǒng)中,被控量c(t)被傳感器和變送器轉(zhuǎn)換為標(biāo)準(zhǔn)量程的直流電流、電壓信號(hào)PV(t),PLC用模擬量輸入模塊中的A-D轉(zhuǎn)換器,將它們轉(zhuǎn)換為時(shí)間上離散的多位二進(jìn)制過(guò)程變量(又稱為反饋值)PVn。
模擬量與數(shù)字量之間的相互轉(zhuǎn)換和PID程序的執(zhí)行都是周期性的操作,其間隔時(shí)間稱為采樣周期Ts。各數(shù)字量中的下標(biāo)n表示該變量是第n次采樣計(jì)算時(shí)的數(shù)字量。
工作原理:
閉環(huán)負(fù)反饋控制可以使過(guò)程變量PVn等于或跟隨設(shè)定值SPn。
性能指標(biāo):
由于給定輸入信號(hào)或擾動(dòng)輸入信號(hào)的變化,使系統(tǒng)的輸出量發(fā)生變化,在系統(tǒng)輸出量達(dá)到穩(wěn)態(tài)之前的過(guò)程稱為過(guò)渡過(guò)程或動(dòng)態(tài)過(guò)程;系統(tǒng)的動(dòng)態(tài)過(guò)程的性能指標(biāo)用階躍響應(yīng)的參數(shù)來(lái)描述,階躍響應(yīng)是指系統(tǒng)的輸入信號(hào)階躍變化時(shí)系統(tǒng)的響應(yīng)。
閉環(huán)控制帶來(lái)的問(wèn)題:
使用閉環(huán)控制后,并不能保證得到良好的動(dòng)靜態(tài)性能,這主要是由系統(tǒng)中的滯后因素造成的,閉環(huán)中的滯后因素主要來(lái)源于被控對(duì)象。
閉環(huán)控制反饋極性的確定:
閉環(huán)控制必須保證系統(tǒng)是負(fù)反饋(誤差=設(shè)定值-過(guò)程變量),而不是正反饋(誤差=設(shè)定值+過(guò)程變量);如果系統(tǒng)接成了正反饋,將會(huì)失控,被控量會(huì)往單一方向增大或減少,給系統(tǒng)的安全帶來(lái)極大的威脅。
判斷反饋極性的辦法:
在調(diào)試時(shí)斷開(kāi)模擬量輸出模塊與執(zhí)行機(jī)構(gòu)之間的連線,在開(kāi)環(huán)狀態(tài)下運(yùn)行PID控制程序。如果控制器有積分環(huán)節(jié),因?yàn)榉答伇粩嚅_(kāi)了,不能消除誤差,模擬量輸出模塊的輸出電壓或電流會(huì)向一個(gè)方向變化;這時(shí)如果假設(shè)接上執(zhí)行機(jī)構(gòu),能減少誤差,則為負(fù)反饋,反之為正反饋。
自己學(xué)習(xí)所記錄,有不足請(qǐng)指教,若有興趣一起交流,關(guān)注微信公眾號(hào):電子開(kāi)發(fā)網(wǎng)
 返回頂部
返回頂部 刷新頁(yè)面
刷新頁(yè)面 下到頁(yè)底
下到頁(yè)底