
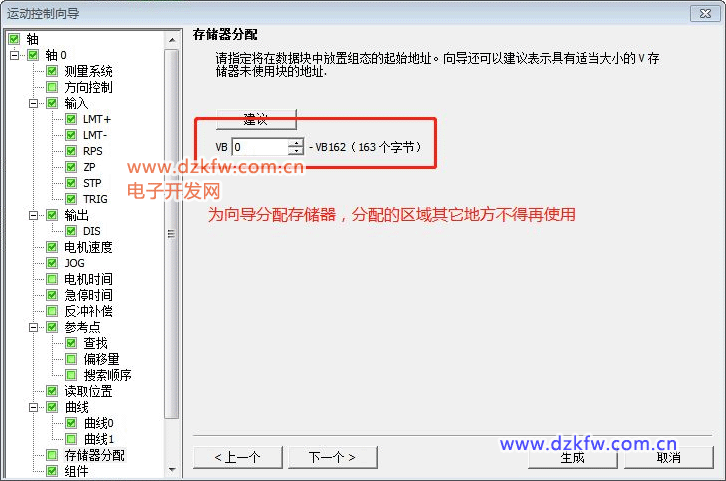
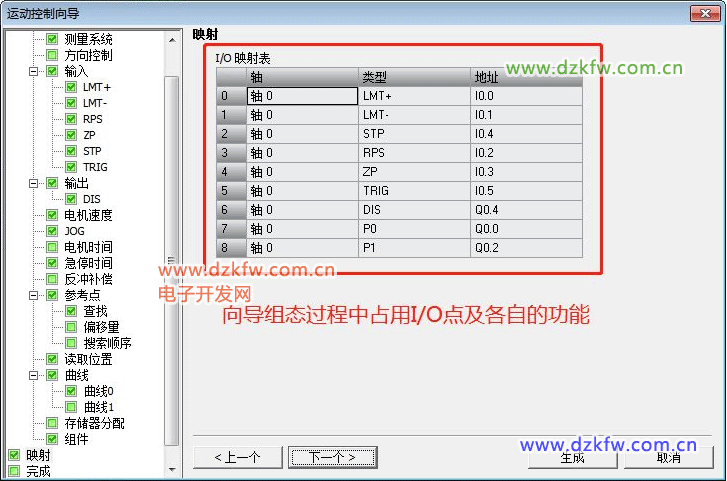
ī”ė┌S7-200 SMART PLCüĒšfŻ¼ę¬ū÷▀\äė┐žųŲŻ¼╬ęéā┐╔ęįį┌╣żŠ▀Ą─▀\äėŽ“ī¦└’├µ╚ź▀Mąą┼õų├Ż¼┼õų├═Ļ│╔║¾Ģ■╔·│╔ę╗ą®ūė│╠ą“Ż¼╬ęéāŠ═ė├╔·│╔Ą─▀@ą®ūė│╠ą“Š═┐╔ęį▀MąąŠÄ│╠ū÷▀\äė┐žųŲŻ¼ĘŪ│ŻĘĮ▒ŃĪŻŽ┬├µŠ═┐┤ę╗Ž┬▀\äėŽ“ī¦Ą─┼õų├ĘĮĘ©Ż║
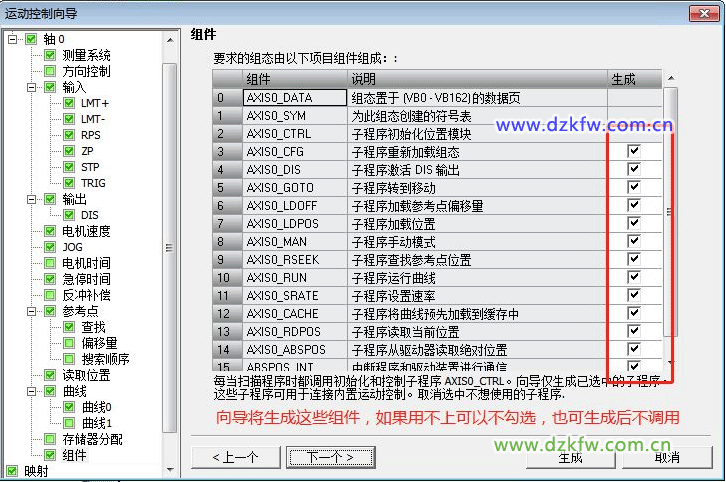
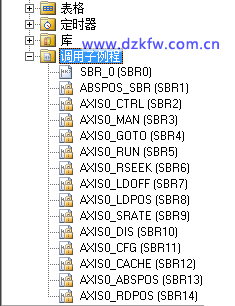
AXIS0_CTRLŻ║▀\äė▌S│§╩╝╗»ĪŻ
AXIS0_MANŻ║╩ųäėūė└²│╠ĪŻ
AXIS0_GOTOŻ║å╬Č╬Č©┴┐ūė└²│╠ĪŻŻ©┐╔įOų├×ķŽÓī”╗“Į^ī”Ż®
AXIS0_RUNŻ║ČÓČ╬Č©┴┐Ū·ŠĆūė└²│╠ĪŻš{ė├Ž“ī¦ųąĮMæBĄ─Ū·ŠĆ▀\äėĪŻ
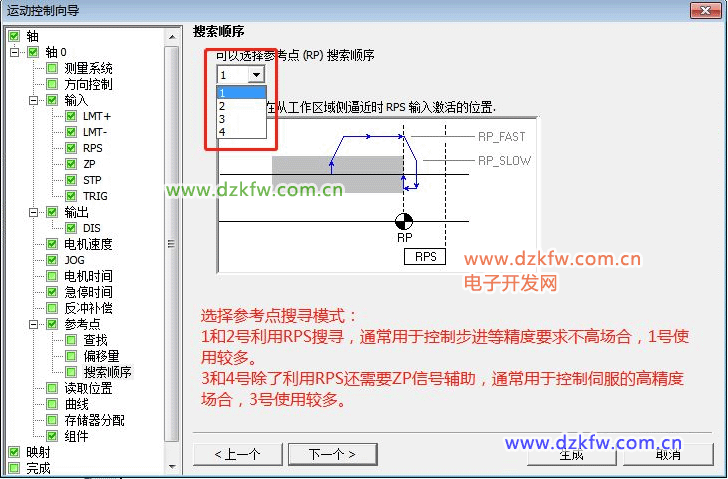
AXIS0_RSEEKŻ║╦čīżģó┐╝³cūė└²│╠ĪŻ░┤ššŽ“ī¦ųąĮMæBĄ─╦čīż╦┘Č╚║═╦čīż─Ż╩Į╦čīżRPSĮ©┴óģó┐╝³cĪŻ
AXIS0_LDPOSŻ║ą▐Ė─«öŪ░╬╗ų├ūė└²│╠Ż¼┐╔ęį×ķ▀\äėĮ©┴óę╗éĆ╠ōöMĄ─ģó┐╝³cĪŻ
AXIS0_SRATEŻ║ą▐Ė─╝ė£p╦┘╝░╝▒═ŻĢrķgūė└²│╠ĪŻ
AXIS0_CFGŻ║ųžą┬╝ė▌dĮMæBūė└²│╠ĪŻą▐Ė─Ž“ī¦öĄō■ēKųąöĄųĄ║¾Č╝ę¬ė├CFG▀Mąą╦óą┬▓┼╔·ą¦ĪŻ
ĻPė┌╬„ķTūėS7-200SMART▀\äė┐žųŲŽ“ī¦Š══Ļ│╔┴╦ŻĪ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū