
ęįŽ┬šf├„ų╗╩Ūßśī”╚²┴ŌFXŽĄ┴ąPLC║═▓Į▀MļŖÖCĄ─▓┘ū„šf├„╝░░Ė└²Ż¼Ųõ╦¹ŽĄ┴ą╗“š▀PLC┬įėą▓╗═¼ų«╠ÄŻ¼╚ńėąę╔å¢Ż¼ÜgėŁ┤¾╝ę┴¶čįėæšōĪŻ
▒Š┤╬▓╔ė├Ą─ė▓╝■
PLCŻ║FX3SA-14MT-CM
▓Į▀M“īäėŲ„Ż║└ū┘ÉDM2282-24
▓Į▀MļŖÖCŻ║└ū┘É57CM26


ĮėŠĆ
Ī÷“īäėŲ„ĮėŠĆŻ║
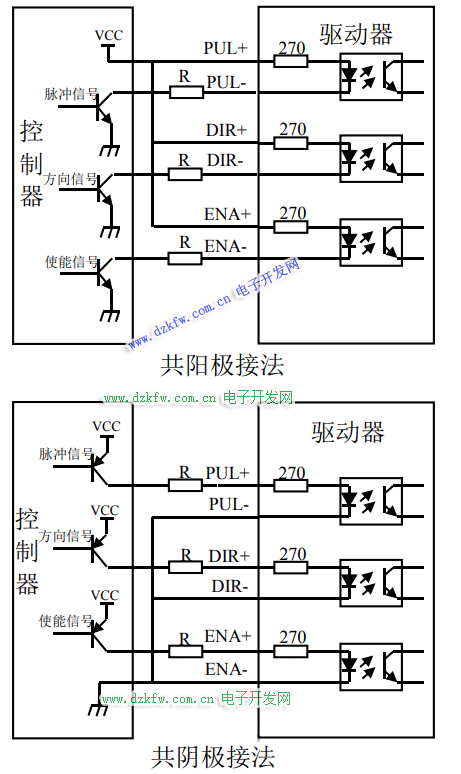
╩ūŽ╚╬ęéā═©▀^▓ķķå“īäėŲ„╩ųāį░l¼F┤╦“īäėŲ„┐╔ęįĮė╩▄NPN║═PNPā╔ĘNą═╠¢Ą─├}ø_Ż¼╬ęéāĮėĄ─╩Ū╚²┴ŌPLCŻ¼╦∙ęįę¬▀xNPNĮėĘ©Ż¼ę▓Š═╩Ū╣▓Ļ¢śOĮėĘ©ĪŻ
ė╔ė┌▒Š“īäėŲ„╩╣ė├Ą─╩Ū-24VĄ─ą═╠¢Ż¼╦∙ęį¤oąĶ┤«ļŖūĶŻ¼īŹļHĮėŠĆ╚ńŽ┬Ż║
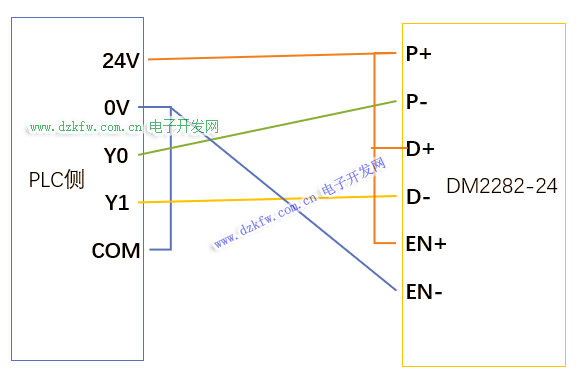
ļŖÖCäė┴”ĮėŠĆ╚ńŽ┬

“īäėŲ„įOų├Ż║
“īäėŲ„é╚ąĶę¬įOČ©Ą─ģóöĄėą╣żū„ļŖ┴„ęį╝░╝ÜĘųĪŻŻ©ūóęŌėąą®“īäėŲ„ąĶ꬚{š¹24/5Vą┼╠¢▌ö╚ļŻ¼╩╣ė├Ū░Ž╚╩ųäėŪąōQŻ¼Ę└ų╣“īäėŲ„¤²Ü¦Ż®
ļŖ┴„įOČ©╣żū„Ż©äėæBŻ®ļŖ┴„įOČ©
DM2282(V3.0)“īäėŲ„▓╔ė├░╦╬╗ō▄┤aķ_ĻPįOČ©╝ÜĘųŠ½Č╚ĪóäėæBļŖ┴„Īóņoų╣ļŖ┴„ęį╝░īŹ¼FļŖÖCģóöĄ║═ā╚▓┐š{╣ØģóöĄĄ─ūįš¹Č©ĪŻįö╝Ü├Ķ╩÷╚ńŽ┬:

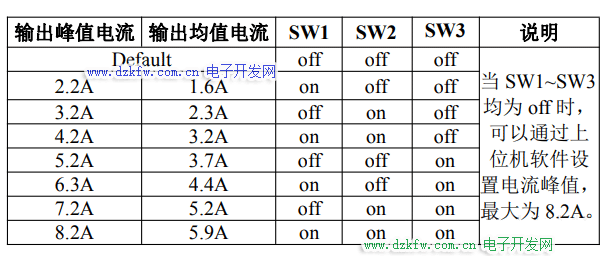
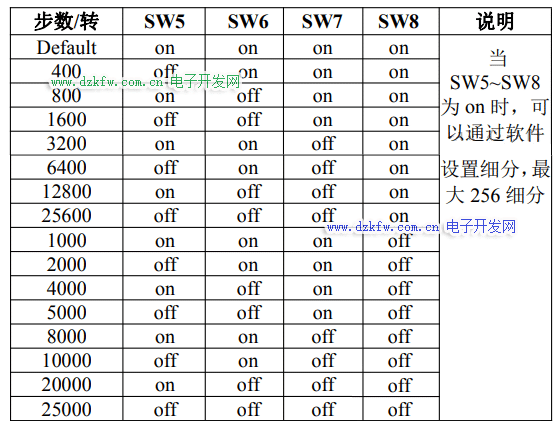
╝ÜĘųįOČ©Ż©─¼šJ├┐▐D├}ø_×ķ 400Ż®
PLC│╠ą“ŠÄīæ
Ī÷įŁ³c╗žÜwŻ║
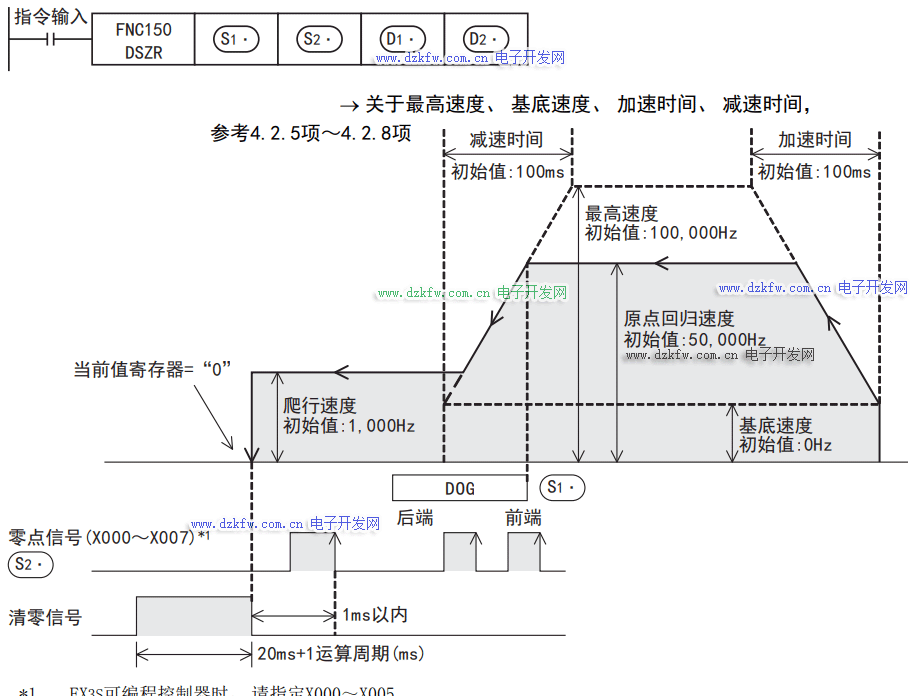
įŁ³c╗žÜwėąā╔éĆųĖ┴ŅŻ¼Ęųäe╩ŪŻ║ DSZR(FNC 150)Ż║ĦDOG╦č╦„Ą─įŁ³c╗žÜw
▀@éĆųĖ┴Ņ┐╔ęįūįäė╦č╦„Į³³c╣ĘŻ©Į³įŁ³cŻ®╬╗ų├Ż¼┼÷ĄĮĮ³³cą┼╠¢║¾£p╦┘ų┴┼└ąą╦┘Č╚Ż¼į┘┼÷ĄĮįŁ³c═Żų╣ĪŻ╚ń╣¹ø]ėą┼÷ĄĮĮ³³cą┼╠¢Ż¼ų▒Įė┼÷ĄĮŽ▐╬╗║¾Ģ■Ę┤▐Dį┘┤╬╦č╦„DOGą┼╠¢ĪŻ
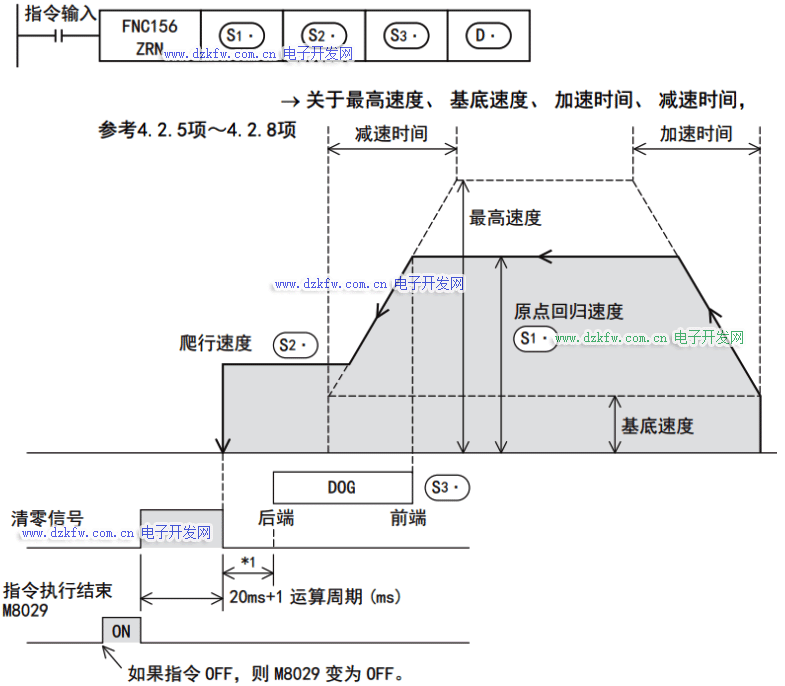
ZRN(FNC 156)Ż║įŁ³c╗žÜw
- ų▒ĮėęįųĖČ©ĘĮŽ“▀MąąįŁ³c╗žÜwĪŻ
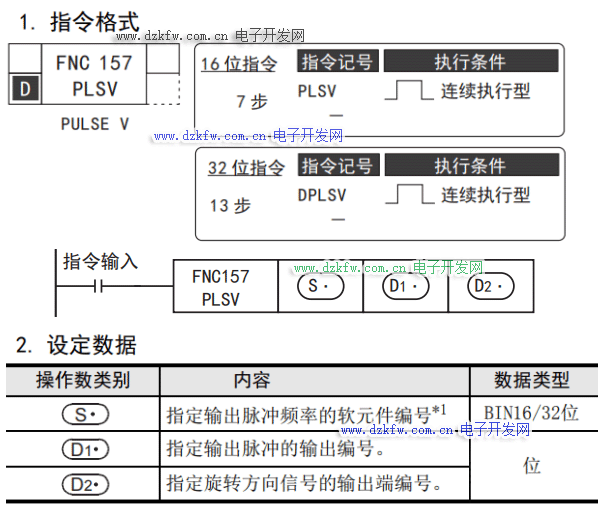
Ī÷³cäėŻ║
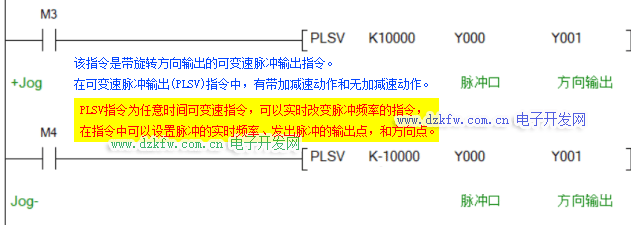
³cäė┐╔ęį╩╣ė├PLSVųĖ┴ŅīŹ¼FŻ¼ųĖ┴Ņ╩╣─▄Ģr▀\ąąŻ¼OFFĢr═Żų╣ĪŻ
Ī÷Č©╬╗Ż║
Č©╬╗Ęų×ķĮ^ī”Č©╬╗║═ŽÓī”Č©╬╗ĪŻ
Į^ī”Č©╬╗╩╣ė├«öŪ░įŁ³c×ķū°ś╦ŽĄŻ¼ęŲäėĄĮī”æ¬╬╗ų├ĪŻ
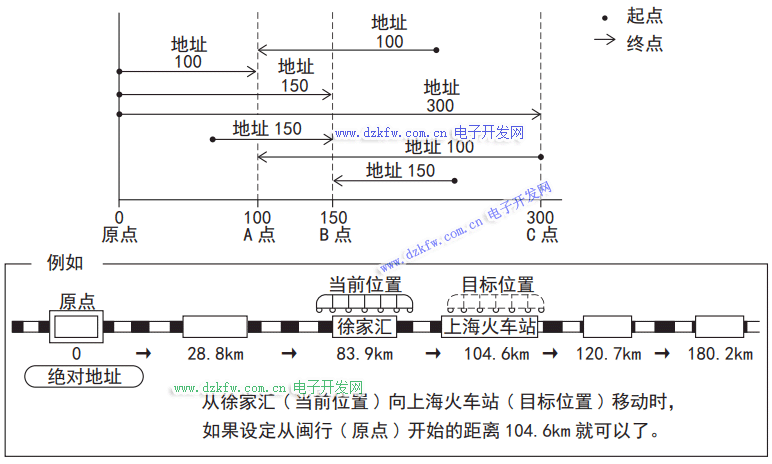
ŽÓī”Č©╬╗ęį«öŪ░╬╗ų├×ķū°ś╦ŽĄ┴Ń³cŻ¼▀MąąųĖČ©├}ø_Ą─ęŲäėĪŻ

ūŅ║¾Ż║▒Š╬─āHĮķĮB╗∙▒ŠĄ─ÄūéĆųĖ┴ŅŻ¼▀ĆėąŲõ╦¹Ą─Č©╬╗ųĖ┴ŅŻ¼┐╔ęį▓ķįāFXŽĄ┴ąČ©╬╗╩ųāįĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū