
1. PID┐žųŲ
į┌╣żśI(y©©)┐žųŲųąŻ¼PID┐žųŲŻ©▒╚└²-ĘeĘų-╬óĘų┐žųŲŻ®Ą├ĄĮ┴╦ÅVĘ║Ą─æ¬(y©®ng)ė├Ż¼▀@╩Ūę“×ķPID┐žųŲŠ▀ėąęįŽ┬ā×(y©Łu)³cŻ║
1Ż®▓╗ąĶę¬ų¬Ą└▒╗┐žī”Ž¾Ą─öĄ(sh©┤)īW(xu©”)─Żą═ĪŻīŹļH╔Ž┤¾ČÓöĄ(sh©┤)╣żśI(y©©)ī”Ž¾£╩┤_Ą─öĄ(sh©┤)īW(xu©”)─Żą═╩Ū¤oĘ©½@Ą├Ą─Ż¼ī”ė┌▀@ę╗ŅÉŽĄĮy(t©»ng)Ż¼╩╣ė├PID┐žųŲ┐╔ęįĄ├ĄĮ▒╚▌^ØMęŌĄ─ą¦╣¹ĪŻō■(j©┤)╚š▒ŠĮy(t©»ng)ėŗŻ¼─┐Ū░PID╝░ūāą═PID ╝sš╝┐é┐žųŲ╗ž┬ĘöĄ(sh©┤)Ą─90%ū¾ėęĪŻ
2Ż®PID┐žųŲŲ„Š▀ėąĄõą═Ą─ĮY(ji©”)śŗ(g©░u)Ż¼│╠ą“įO(sh©©)ėŗ║åå╬Ż¼ģóöĄ(sh©┤)š{(di©żo)š¹ĘĮ▒ŃĪŻ
3Ż®ėą▌^ÅŖĄ─ņ`╗Ņąį║═▀mæ¬(y©®ng)ąįŻ¼Ė∙ō■(j©┤)▒╗┐žī”Ž¾Ą─Š▀¾wŪķørŻ¼┐╔ęį▓╔ė├Ė„ĘNPID┐žųŲĄ─ūāĘN║═Ė─▀MĄ─┐žųŲĘĮ╩ĮŻ¼╚ń PIĪóPDĪóĦ╦└ģ^(q©▒)Ą─PIDĪóĘeĘųĘųļx╩ĮPIDĪóūā╦┘ĘeĘųPIDĄ╚ĪŻļSų°ųŪ─▄┐žųŲ╝╝ąg(sh©┤)Ą─░l(f©Ī)š╣Ż¼PID┐žųŲ┼c─Ż║²┐žųŲĪó╔±Įø(j©®ng)ŠW(w©Żng)Įj(lu©░)┐žųŲĄ╚¼F(xi©żn)┤·┐žųŲĘĮĘ©ŽÓĮY(ji©”)║ŽŻ¼┐╔ęįīŹ¼F(xi©żn)PID┐žųŲŲ„Ą─ģóöĄ(sh©┤)ūįš¹Č©Ż¼╩╣PID┐žųŲŲ„Š▀ėąĮø(j©®ng)Š├▓╗╦źĄ─╔·├³┴”ĪŻ
2. ╚²┴ŌplcīŹ¼F(xi©żn)PID┐žųŲĄ─ĘĮĘ©
╚ńłD1╦∙╩Š×ķ▓╔ė├PLCī”─ŻöM┴┐īŹąąPID┐žųŲĄ─ŽĄĮy(t©»ng)ĮY(ji©”)śŗ(g©░u)┐“łDĪŻė├PLCī”─ŻöM┴┐▀MąąPID┐žųŲĢrŻ¼┐╔ęį▓╔ė├ęįŽ┬ÄūĘNĘĮĘ©Ż║
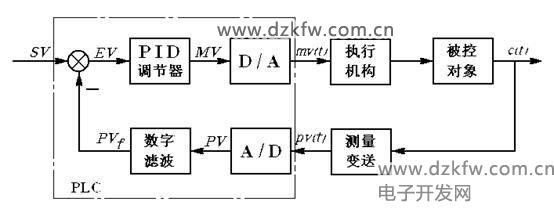
łD1 ė├PLCīŹ¼F(xi©żn)─ŻöM┴┐PID┐žųŲĄ─ŽĄĮy(t©»ng)ĮY(ji©”)śŗ(g©░u)┐“łD
1Ż®╩╣ė├PID▀^│╠┐žųŲ─ŻēKĪŻ▀@ĘN─ŻēKĄ─PID┐žųŲ│╠ą“╩ŪPLC╔·«a(ch©Żn)ÅS╝ęįO(sh©©)ėŗĄ─Ż¼▓ó┤µĘ┼į┌─ŻēKųąŻ¼ė├æ¶į┌╩╣ė├Ģrų╗ąĶę¬įO(sh©©)ų├ę╗ą®ģóöĄ(sh©┤)Ż¼╩╣ė├ŲüĒĘŪ│ŻĘĮ▒ŃŻ¼ę╗ēK─ŻēK┐╔ęį┐žųŲÄū┬Ę╔§ų┴Äū╩«┬Ęķ]Łh(hu©ón)╗ž┬ĘĪŻĄ½╩Ū▀@ĘN─ŻēKĄ─ārĖ±░║┘FŻ¼ę╗░Ńį┌┤¾ą═┐žųŲŽĄĮy(t©»ng)ųą╩╣ė├ĪŻ╚ń╚²┴ŌĄ─AŽĄ┴ąĪóQŽĄ┴ąPLCĄ─PID┐žųŲ─ŻēKĪŻ
2Ż®╩╣ė├PID╣”─▄ųĖ┴ŅĪŻ¼F(xi©żn)į┌║▄ČÓųąąĪą═ PLCČ╝╠ß╣®PID┐žųŲė├Ą─╣”─▄ųĖ┴ŅŻ¼╚ńFX2NŽĄ┴ąPLCĄ─PIDųĖ┴ŅĪŻ╦³éāīŹļH╔Ž╩Ūė├ė┌PID┐žųŲĄ─ūė│╠ą“Ż¼┼cA/DĪóD/A─ŻēKę╗Ų╩╣ė├Ż¼┐╔ęįĄ├ĄĮŅÉ╦Ųė┌╩╣ė├PID▀^│╠┐žųŲ─ŻēKĄ─ą¦╣¹Ż¼ārĖ±ģs▒Ńę╦Ą├ČÓĪŻ
3Ż®╩╣ė├ūįŠÄ│╠ą“?q©▒)Ź¼F(xi©żn)PIDķ]Łh(hu©ón)┐žųŲĪŻėąĄ─PLCø]ėąėąPID▀^│╠┐žųŲ─ŻēK║═ PID┐žųŲųĖ┴ŅŻ¼ėąĢrļm╚╗ėąPID┐žųŲųĖ┴ŅŻ¼Ą½ė├涎Ż═¹▓╔ė├ūāą═PID┐žųŲ╦ŃĘ©ĪŻį┌▀@ą®ŪķørŽ┬Ż¼Č╝ąĶę¬ė╔ė├æ¶ūį╝║ŠÄųŲPID┐žųŲ│╠ą“ĪŻ
3. FX2NĄ─PIDųĖ┴Ņ
PIDųĖ┴ŅĄ─ŠÄ╠¢×ķFNC88Ż¼╚ńłD2╦∙╩Šį┤▓┘ū„öĄ(sh©┤)Ż█S1Ż▌ĪóŻ█S2Ż▌Īó[S3]║═─┐ś╦▓┘ū„öĄ(sh©┤)[D]Š∙×ķöĄ(sh©┤)ō■(j©┤)╝─┤µŲ„DŻ¼16╬╗ųĖ┴ŅŻ¼š╝9éĆ│╠ą“▓ĮĪŻŻ█S1Ż▌║═Ż█S2Ż▌Ęųäeė├üĒ┤µĘ┼ĮoČ©ųĄSV║═«öŪ░£y┴┐ĄĮĄ─Ę┤üųĄPVŻ¼Ż█S3Ż▌~[S3]Ż½6ė├üĒ┤µĘ┼┐žųŲģóöĄ(sh©┤)Ą─ųĄŻ¼▀\╦ŃĮY(ji©”)╣¹MV┤µĘ┼į┌Ż█DŻ▌ųąĪŻį┤▓┘ū„öĄ(sh©┤)Ż█S3Ż▌š╝ė├Å─Ż█S3Ż▌ķ_╩╝Ą─25éĆöĄ(sh©┤)ō■(j©┤)╝─┤µŲ„ĪŻ
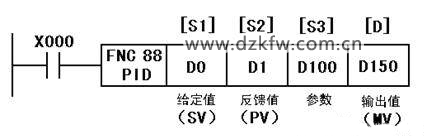
łD2 ╚²┴ŌPLCĄ─PIDųĖ┴Ņ
PIDųĖ┴Ņ╩Ūė├üĒš{(di©żo)ė├PID▀\╦Ń│╠ą“Ż¼į┌PID▀\╦Ńķ_╩╝ų«Ū░Ż¼æ¬(y©®ng)╩╣ė├MOVųĖ┴ŅīóģóöĄ(sh©┤)Ż©ęŖ▒ĒŻ®įO(sh©©)Č©ųĄŅA(y©┤)Ž╚īæ╚ļī”æ¬(y©®ng)Ą─öĄ(sh©┤)ō■(j©┤)╝─┤µŲ„ųąĪŻ╚ń╣¹╩╣ė├ėąöÓļŖ▒Ż│ų╣”─▄Ą─öĄ(sh©┤)ō■(j©┤)╝─┤µŲ„Ż¼▓╗ąĶę¬ųžÅ═(f©┤)īæ╚ļĪŻ╚ń╣¹─┐ś╦▓┘ū„öĄ(sh©┤)[D]ėąöÓļŖ▒Ż│ų╣”─▄Ż¼æ¬(y©®ng)╩╣ė├│§╩╝╗»├}ø_M8002Ą─│Żķ_ė|³cīóŲõÅ═(f©┤)╬╗ĪŻ
▒Ē PID┐žųŲģóöĄ(sh©┤)╝░įO(sh©©)Č©
|
į┤▓┘ū„öĄ(sh©┤) |
ģó öĄ(sh©┤) |
įO(sh©©)Č©ĘČć·╗“šf├„ |
éõ ūó |
|
Ż█S3Ż▌ |
▓╔śėų▄Ų┌Ż©TsŻ® |
1~32767ms |
▓╗─▄ąĪė┌Æ▀├Ķų▄Ų┌ |
|
Ż█S3Ż▌+ 1 |
äėū„ĘĮŽ“Ż©ACTŻ® |
Bit0: 0×ķš²ū„ė├Īó1×ķĘ┤ū„ė├ Bit1: 0×ķ¤o▌ö╚ļūā╗»┴┐ł¾Š» 1×ķėą▌ö╚ļūā╗»┴┐ł¾Š» Bit2: 0×ķ¤o▌ö│÷ūā╗»┴┐ł¾Š» 1×ķėą▌ö│÷ūā╗»┴┐ł¾Š» |
Bit3 ~ Bit15▓╗ė├ |
|
Ż█S3Ż▌+ 2 |
▌ö╚ļ×V▓©│ŻöĄ(sh©┤)Ż©LŻ® |
0~99Ż©%Ż® |
ī”Ę┤ü┴┐Ą─ę╗ļAæTąįöĄ(sh©┤)ūų×V▓©Łh(hu©ón)╣Ø(ji©”) |
|
Ż█S3Ż▌+ 3 |
▒╚└²į÷굯©K pŻ® |
1~32767Ż©%Ż® |
|
|
Ż█S3Ż▌+ 4 |
ĘeĘųĢrķgŻ©T IŻ® |
0~32767Ż©Ī┴100msŻ® |
0┼cĪžū„═¼śė╠Ä└Ē |
|
Ż█S3Ż▌+ 5 |
╬óĘųį÷ęµ (K D) |
0~100Ż©%Ż® |
|
|
Ż█S3Ż▌+ 6 |
╬óĘųĢrķgŻ©T DŻ® |
0~32767Ż©Ī┴10msŻ® |
0×ķ¤o╬óĘų |
|
Ż█S3Ż▌+ 7 ~ [S3]+ 19 |
Ī¬ |
Ī¬ |
PID▀\╦Ńš╝ė├ |
|
Ż█S3Ż▌+ 20 |
▌ö╚ļūā╗»┴┐Ż©į÷ĘĮŻ®Š»ł¾įO(sh©©)Č©ųĄ |
0~32767 |
ė╔ė├æ¶įO(sh©©)Č©ACTŻ©Ż█S3Ż▌+ 1Ż®×ķK2~K7Ģrėąą¦Ż¼╝┤ACTĄ─Bit1 ║═Bit2ų┴╔┘ėąę╗éĆ×ķ1Ģr▓┼ėąą¦Ż╗ «öACTĄ─Bit1 ║═Bit2Č╝×ķ0ĢrŻ¼Ż█S3Ż▌+ 20 ~Ż█S3Ż▌+ 24¤oą¦ |
|
Ż█S3Ż▌+ 21 |
▌ö╚ļūā╗»┴┐Ż©£pĘĮŻ®Š»ł¾įO(sh©©)Č©ųĄ |
0~32767 | |
|
Ż█S3Ż▌+ 22 |
▌ö│÷ūā╗»┴┐Ż©į÷ĘĮŻ®Š»ł¾įO(sh©©)Č©ųĄ |
0~32767 | |
|
Ż█S3Ż▌+ 23 |
▌ö│÷ūā╗»┴┐Ż©£pĘĮŻ®Š»ł¾įO(sh©©)Č©ųĄ |
0~32767 | |
|
Ż█S3Ż▌+ 24 |
Š»ł¾▌ö│÷ |
Bit0: ▌ö╚ļūā╗»┴┐Ż©į÷ĘĮŻ®│¼│÷ Bit1: ▌ö╚ļūā╗»┴┐Ż©£pĘĮŻ®│¼│÷ Bit2: ▌ö│÷ūā╗»┴┐Ż©į÷ĘĮŻ®│¼│÷ Bit3: ▌ö│÷ūā╗»┴┐Ż©£pĘĮŻ®│¼│÷ |
PIDųĖ┴Ņ┐╔ęį═¼ĢrČÓ┤╬╩╣ė├Ż¼Ą½╩Ūė├ė┌▀\╦ŃĄ─[S3]Īó[D]Ą─öĄ(sh©┤)ō■(j©┤)╝─┤µŲ„į¬╝■╠¢▓╗─▄ųžÅ═(f©┤)ĪŻ
PIDųĖ┴Ņ┐╔ęįį┌Č©ĢrųąöÓĪóūė│╠ą“Īó▓Į▀MųĖ┴Ņ║═▐D(zhu©Żn)ęŲųĖ┴Ņā╚(n©©i)╩╣ė├Ż¼Ą½╩Ūæ¬(y©®ng)īóŻ█S3Ż▌Ż½7ŪÕ┴ŃŻ©▓╔ė├├}ø_ł╠(zh©¬)ąąĄ─MOVųĖ┴ŅŻ®ų«║¾▓┼─▄╩╣ė├ĪŻ
┐žųŲģóöĄ(sh©┤)Ą─įO(sh©©)Č©║═ PID▀\╦ŃųąĄ─öĄ(sh©┤)ō■(j©┤)│÷¼F(xi©żn)Õeš`ĢrŻ¼Ī░▀\╦ŃÕeš`Ī▒ś╦ųŠM8067×ķ ONŻ¼Õeš`┤·┤a┤µĘ┼į┌D8067ųąĪŻ
PIDųĖ┴Ņ▓╔ė├į÷┴┐╩ĮPID╦ŃĘ©Ż¼┐žųŲ╦ŃĘ©ųą▀ĆŠC║Ž╩╣ė├┴╦Ę┤ü┴┐ę╗ļAæTąįöĄ(sh©┤)ūų×V▓©Īó▓╗═Ļ╚½╬óĘų║═Ę┤ü┴┐╬óĘųĄ╚┤ļ╩®Ż¼╩╣įōųĖ┴Ņ▒╚Ųš═©Ą─PID╦ŃĘ©Š▀ėąĖ³║├Ą─┐žųŲą¦╣¹ĪŻ
PID┐žųŲ╩ŪĖ∙ō■(j©┤)Ī░äėū„ĘĮŽ“Ī▒Ż©[S3]+1Ż®Ą─įO(sh©©)Č©ā╚(n©©i)╚▌Ż¼▀Mąąš²ū„ė├╗“Ę┤ū„ė├Ą─PID▀\╦ŃĪŻPID▀\╦Ń╣½╩Į╚ńŽ┬Ż║
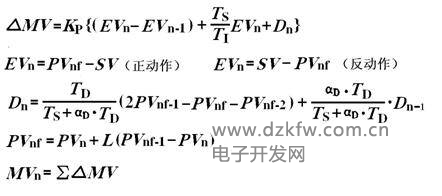
ęį╔Ž╣½╩ĮųąŻ║Ī„MV╩Ū▒Š┤╬║═╔Žę╗┤╬▓╔śėĢrPID▌ö│÷┴┐Ą─▓ŅųĄŻ¼MVn╩Ū▒Š┤╬Ą─PID▌ö│÷┴┐Ż╗EVn║═ EVn-1Ęųäe╩Ū▒Š┤╬║═╔Žę╗┤╬▓╔śėĢrĄ─š`▓ŅŻ¼SV×ķįO(sh©©)Č©ųĄŻ╗PVn╩Ū▒Š┤╬▓╔śėĄ─Ę┤üųĄŻ¼PVnfĪóPVnf-1║═PVnf-2Ęųäe╩Ū▒Š┤╬ĪóŪ░ę╗┤╬║═Ū░ā╔┤╬×V▓©║¾Ą─Ę┤üųĄŻ¼L╩ŪæTąįöĄ(sh©┤)ūų×V▓©Ą─ŽĄöĄ(sh©┤)Ż╗Dn║═Dn-lĘųäe╩Ū▒Š┤╬║═╔Žę╗┤╬▓╔śėĢrĄ─╬óĘų▓┐ĘųŻ╗K p╩Ū▒╚└²į÷굯¼T S╩Ū▓╔śėų▄Ų┌Ż¼T I║═T DĘųäe╩ŪĘeĘųĢrķg║═╬óĘųĢrķgŻ¼”┴D╩Ū▓╗═Ļ╚½╬óĘųĄ─×V▓©Ģrķg│ŻöĄ(sh©┤)┼c╬óĘųĢrķgTDĄ─▒╚ųĄĪŻ
4.PIDģóöĄ(sh©┤)Ą─š¹Č©
PID┐žųŲŲ„ėą4éĆų„ꬥ─ģóöĄ(sh©┤)K pĪóT IĪóT D║═T SąĶš¹Č©Ż¼¤ošō──ę╗éĆģóöĄ(sh©┤)▀xō±Ą├▓╗║Ž▀mČ╝Ģ■ė░Ēæ┐žųŲą¦╣¹ĪŻį┌š¹Č©ģóöĄ(sh©┤)Ģræ¬(y©®ng)░č╬šūĪPIDģóöĄ(sh©┤)┼cŽĄĮy(t©»ng)äėæB(t©żi)ĪóņoæB(t©żi)ąį─▄ų«ķgĄ─ĻP(gu©Īn)ŽĄĪŻ
į┌PŻ©▒╚└²Ż®ĪóIŻ©ĘeĘųŻ®ĪóDŻ©╬óĘųŻ®▀@╚²ĘN┐žųŲū„ė├ųąŻ¼▒╚└²▓┐Ęų┼cš`▓Ņą┼╠¢į┌Ģrķg╔Ž╩Ūę╗ų┬Ą─Ż¼ų╗꬚`▓Ņę╗│÷¼F(xi©żn)Ż¼▒╚└²▓┐ĘųŠ═─▄╝░ĢrĄž«a(ch©Żn)╔·┼cš`▓Ņ│╔š²▒╚Ą─š{(di©żo)╣Ø(ji©”)ū„ė├Ż¼Š▀ėąš{(di©żo)╣Ø(ji©”)╝░ĢrĄ─╠ž³cĪŻ▒╚└²ŽĄöĄ(sh©┤)K pįĮ┤¾Ż¼▒╚└²š{(di©żo)╣Ø(ji©”)ū„ė├įĮÅŖŻ¼ŽĄĮy(t©»ng)Ą─ĘĆ(w©¦n)æB(t©żi)Š½Č╚įĮĖ▀Ż╗Ą½╩Ūī”ė┌┤¾ČÓöĄ(sh©┤)ŽĄĮy(t©»ng)Ż¼K p▀^┤¾Ģ■╩╣ŽĄĮy(t©»ng)Ą─▌ö│÷┴┐š±╩Ä╝ėäĪŻ¼ĘĆ(w©¦n)Č©ąįĮĄĄ═ĪŻ
ĘeĘųū„ė├┼c«öŪ░š`▓ŅĄ─┤¾ąĪ║═š`▓ŅĄ─Üv╩ĘŪķørČ╝ėąĻP(gu©Īn)ŽĄŻ¼ų╗꬚`▓Ņ▓╗×ķ┴ŃŻ¼┐žųŲŲ„Ą─▌ö│÷Š═Ģ■ę“ĘeĘųū„ė├Č°▓╗öÓūā╗»Ż¼ę╗ų▒ꬥĮš`▓ŅŽ¹╩¦Ż¼ŽĄĮy(t©»ng)╠Äė┌ĘĆ(w©¦n)Č©ĀŅæB(t©żi)ĢrŻ¼ĘeĘų▓┐Ęų▓┼▓╗į┘ūā╗»ĪŻę“┤╦Ż¼ĘeĘų▓┐Ęų┐╔ęįŽ¹│²ĘĆ(w©¦n)æB(t©żi)š`▓ŅŻ¼╠ßĖ▀┐žųŲŠ½Č╚Ż¼Ą½╩ŪĘeĘųū„ė├Ą─äėū„ŠÅ┬²Ż¼┐╔─▄ĮoŽĄĮy(t©»ng)Ą─äėæB(t©żi)ĘĆ(w©¦n)Č©ąįĦüĒ▓╗┴╝ė░ĒæĪŻĘeĘųĢrķg│ŻöĄ(sh©┤)T Iį÷┤¾ĢrŻ¼ĘeĘųū„ė├£p╚§Ż¼ŽĄĮy(t©»ng)Ą─äėæB(t©żi)ąį─▄Ż©ĘĆ(w©¦n)Č©ąįŻ®┐╔─▄ėą╦∙Ė─╔ŲŻ¼Ą½╩ŪŽ¹│²ĘĆ(w©¦n)æB(t©żi)š`▓ŅĄ─╦┘Č╚£p┬²ĪŻ
╬óĘų▓┐Ęų╩ŪĖ∙ō■(j©┤)š`▓Ņūā╗»Ą─╦┘Č╚Ż¼╠ßŪ░Įo│÷▌^┤¾Ą─š{(di©żo)╣Ø(ji©”)ū„ė├ĪŻ╬óĘų▓┐ĘųĘ┤ė│┴╦ŽĄĮy(t©»ng)ūā╗»Ą─┌ģä▌Ż¼╦³▌^▒╚└²š{(di©żo)╣Ø(ji©”)Ė³×ķ╝░ĢrŻ¼╦∙ęį╬óĘų▓┐ĘųŠ▀ėą│¼Ū░║═ŅA(y©┤)£yĄ─╠ž³cĪŻ╬óĘųĢrķg│ŻöĄ(sh©┤)T Dį÷┤¾ĢrŻ¼│¼š{(di©żo)┴┐£pąĪŻ¼äėæB(t©żi)ąį─▄Ą├ĄĮĖ─╔ŲŻ¼Ą½╩ŪęųųŲĖ▀ŅlĖ╔ö_Ą──▄┴”Ž┬ĮĄĪŻ
▀x╚Ī▓╔śėų▄Ų┌T SĢrŻ¼æ¬(y©®ng)╩╣╦³▀h▀hąĪė┌ŽĄĮy(t©»ng)ļA▄SĒææ¬(y©®ng)Ą─╝ā£■║¾Ģrķg╗“╔Ž╔²ĢrķgĪŻ×ķ╩╣▓╔śėųĄ─▄╝░ĢrĘ┤ė│─ŻöM┴┐Ą─ūā╗»Ż¼T SįĮąĪįĮ║├ĪŻĄ½╩ŪT S╠½ąĪĢ■į÷╝ėCPUĄ─▀\╦Ń╣żū„┴┐Ż¼ŽÓÓÅā╔┤╬▓╔śėĄ─▓ŅųĄÄū║§ø]ėą╩▓├┤ūā╗»Ż¼╦∙ęįę▓▓╗ę╦īóT S╚ĪĄ├▀^ąĪĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū