
±¾¹Ö÷ŅŖ°üĄØČēĻĀŅ»Š©ČČŻ£ŗ
1”¢Ź²Ć“ŹĒß\ÓæŲÖĘ£ØMotion Control£©£æ
1”¢Ź²Ć“ŹĒß\ÓæŲÖĘ£ØMotion Control£©£æ
ß\ÓæŲÖĘ£ØMotion Control£©ŹĒėā×ŌÓ»ÆæŲÖʵÄŅ»·ÖÖ§£Ø³£ŅµÄėā×ŌÓ»ÆæŲÖĘ°üĄØß^³ĢæŲÖĘ”¢ß\ÓæŲÖĘµČ£©£¬ĖüŹĒĶØß^æŲÖʱ»æŲ¦Ļó£ØĶس£ŹĒ²½ßMėC»ņÕßĖÅ·žėC£©µÄĖŁ¶Č”¢Ī»ŅĘ”¢Į¦¾ŲµČĪļĄķĮ棬ķĶź³ÉÖø¶ØµÄæŲÖĘČĪÕ”£±ČČē¹¤I×ŌÓ»ÆÖŠ¹¤×÷Å_ĶłĶß\ÓµÄæŲÖĘ”¢3D“ņÓ”CµÄæŲÖĘ”¢µæŲC“²µÄæŲÖĘ”¢¹¤ICĘ÷ČĖµÄæŲÖʵȶ¼ŁÓŚß\ÓæŲÖʵķ¶® ”£
øłžæŲÖʵÄėyŅ׳Ģ¶ČµÄ²»Ķ¬£¬ß\ÓæŲÖĘÓÖæÉ·ÖéĶØÓĆß\ÓæŲÖĘŗĶĶėsß\ÓæŲÖĘ”£
"ĶØÓĆß\ÓæŲÖĘ£ØGeneral Motion Control£©"ŹĒÖø±»æŲ¦ĻóµÄß\ÓŠĪŹ½Ļą¦±ČŻ^ŗĪ£Ø±ČČē¹¤×÷Å_µÄĶłĶß\Ó£©”¢Ķس£Ö»ŠčŅŖæŲÖĘŅ»ŻS”¢Ęäß\ÓÜŪE¶ąéÖ±¾µÄß\ÓæŲÖĘ£»
"Ķėsß\ÓæŲÖĘ£ØComplex Motion Control£©"ŹĒÖøÄĒŠ©ŠčŅŖæŲÖʶąŻS fÕ{ß\ӵĔ¢ß\ÓÜŪE±ČŻ^ĶėsµÄ”¢¦±»æŲ¦ĻóµÄĖŁ¶Č”¢Ī»ÖĆ”¢Į¦¾ŲµČĪļĄķĮ澫¶ČŅŖĒó±ČŻ^øßµÄß\ÓæŲÖĘ£Ø±ČČēµæŲC“²”¢¹¤ICĘ÷ČĖµÄæŲÖĘ£©£»
oÕŹĒĶØÓĆß\ÓæŲÖĘߏĒĶėsß\ÓæŲÖĘ£¬¶¼ŹĒÓÉß\ÓæŲÖĘĻµ½y£ØMotion Control System£©Ķź³ÉµÄ”£
Ņ»ĶźÕūß\ÓæŲÖĘĻµ½y°üĄØß\ÓæŲÖĘĘ÷”¢²½ßMņÓĘ÷»ņÕßĖÅ·žņÓĘ÷”¢²½ßMėC»ņÕßĖÅ·žėC½M³É”£ÓÉÓŚĖÅ·žėC±¾Éķ¼Æ³É¾“aĘ÷£¬Ņņ“ĖĶس£³Éé]hæŲÖĘĻµ½y£»¶ų²½ßMėC±¾Éķ]ÓŠ¾“aĘ÷£¬Ņņ“Ė¶ą³Éé_hæŲÖĘĻµ½y”£®Č»£¬ß@Ņ²²»ŹĒ½^¦µÄ”£æÉŅŌĶØß^ŌŚß\ÓŻSÉĻ°²Ńb¾“aĘ÷¶ųŹ¹²½ßMėCņӵįSŅ²³Éé]hĻµ½y”£
µäŠĶµÄß\ÓæŲÖĘĻµ½yČēĻĀDĖłŹ¾£ŗ
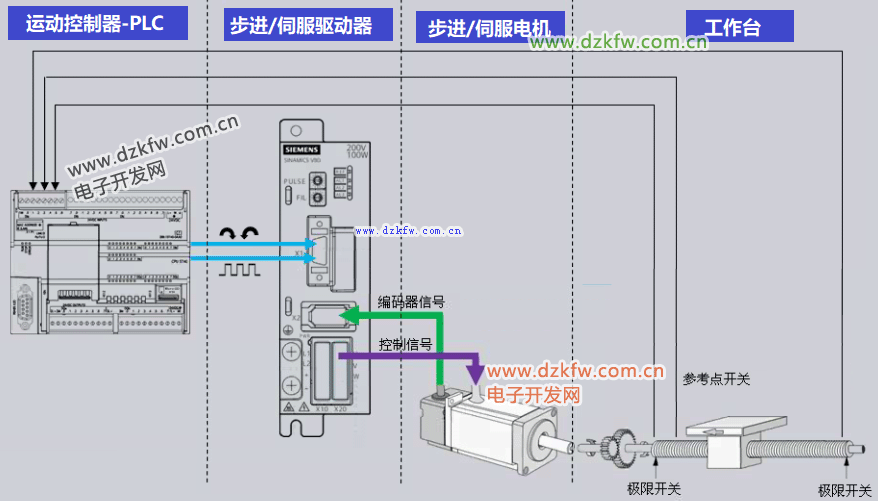
ß\ÓæŲÖĘĘ÷ĶØß^°lĖĶĆ}_»ņÕßĶ؊ŵķ½Ź½¢æŲÖĘŠÅĢ°lĖĶ½o²½ßMņÓĘ÷»ņÕßĖÅ·žņÓĘ÷£¬²½ßMņÓĘ÷»ņÕßĖÅ·žņÓĘ÷ŌŁøłžæŲÖĘÖøĮīņÓ²½ßMėC»ņÕßĖÅ·žėCßMŠŠß\Ó”£
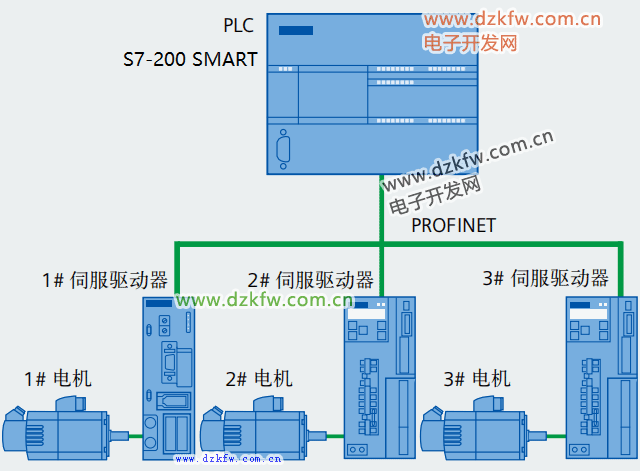
1£©”¢Ķ؊ŵķ½Ź½£ŗ
S7-200 SMARTĖŹŠĶCPUæÉŅŌĶØß^PROFINETĶ؊ŵķ½Ź½¢æŲÖĘŠÅĢ°lĖĶ½oSINAMICS V90ĖÅ·žņÓĘ÷£ØPN°ę±¾£©£¬ŗóÕßæÉŅŌæŲÖĘĖÅ·žėCßMŠŠß\Ó£»³żĮĖPROFINET£¬ĘäĖüPLCßÓŠÖ§³ÖModbus”¢CANopenµČĶØŠÅ f×hµÄ°ę±¾£»ĻĀĆęß@DŹĒS7-200 SMARTĶØß^PROFINET¾W½jæŲÖĘČżÅ_ĖÅ·žņÓĘ÷µÄŹ¾ŅāD£ŗ
2£©”¢Ć}_µÄ·½Ź½£ŗ
ß\ÓæŲÖĘĘ÷ĶØß^°lĖĶÕ¼æÕ±Čé50%µÄĆ}_ŠÅĢ½o²½ßM/ĖÅ·žņÓĘ÷£¬ŗóÕßņÓ²½ßMėC»ņÕßĖÅ·žėCßMŠŠß\Ó”£øłžŌOÖĆµÄ²»Ķ¬£¬Ć}_ŠÅĢæÉŅŌÓŠ1Ā·»ņÕß2Ā·£¬ÓĆķÖøŹ¾ŽDĖŁ»ņÕß·½Ļņ”£ß@·NŠÅĢŻ³ö·½Ź½Ņ²·QéPTO£ØPulse Train Output£©£¬¼“"Ć}_“®Ż³ö"”£
SINAMICS V90ÓŠPTI°ę±¾£¬ß@ĄļµÄPTIŹĒÖø£ØPulse Train Input£©£¬¼“"Ć}_“®ŻČė"£¬Ņ²¾ĶŹĒÕfŌ°ę±¾µÄĖÅ·žņÓĘ÷½ÓŹÕPTOŠÅĢ”£
ĻĀĆęß@DŹĒS7-200 SMARTŹ¹ÓĆĆ}_µÄ·½Ź½æŲÖĘČżÅ_ĖÅ·žņÓĘ÷µÄŹ¾ŅāD£ŗ
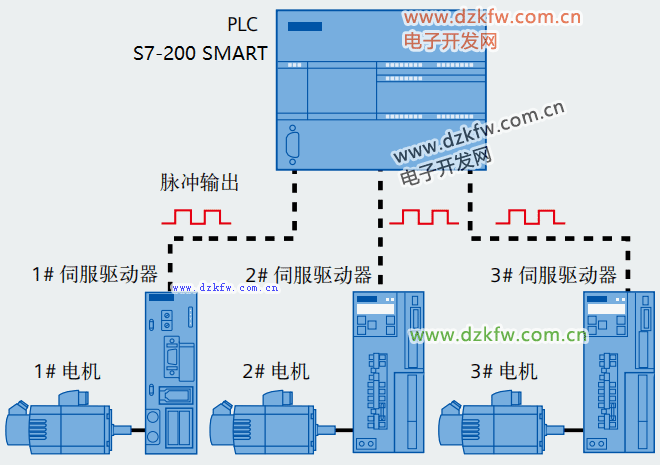
×¢Ņā£ŗS7-200 SMART¾§ów¹ÜŠĶµÄCPUæÉŅŌŻ³öĆ}_“®£ØPTO£©£¬Ą^ėĘ÷Ż³öŠĶ²»ÄÜŻ³öPTO£¬ßxŠĶµÄrŗņŅŖ¼ÓŅŌ ^·Ö£»S7-200 SMARTøßĖŁĆ}_µÄīlĀŹ·¶śé£ŗ2Hz~100KHz£Ø¼“ĆæĆė2Ć}_µ½ĆæĆė100,000Ć}_£©£»
3”¢S7-200 SMARTµÄß\ÓŻSéĮĖ·½±ćµÄßMŠŠß\ÓæŲÖĘ£¬S7-200 SMARTŅżČėĮĖß\ÓŻSµÄøÅÄī”£
ß\ÓŻSŹĒŅ»ßŻÉĻµÄøÅÄī£¬ŗĪĄķ½ā£¬ĖüŹĒŅ»Ö±¾ŠĶµÄ”¢°üĄØŻ³ö£ØėC£©ŠÅĢŗĶŻČė£ØĻŽĪ»£©ŠÅĢµÄŻS”£
S7-200 SMARTĖŹŠĶCPUÖ§³Öß\ÓæŲÖĘ¹¦ÄÜ”£ĘäÖŠ£¬CPU ST20×ī¶ąÖ§³Ö2ß\ÓŻS£»CPU ST40ŗĶST60×ī¶ąÖ§³Ö3ß\ÓŻS£»
Ćæß\ÓŻS¶¼ÓŠČżŻ³öŠÅĢ£ŗP0”¢P1ŗĶDISŠÅĢ£»
P0ŗĶP1ÓĆÓŚæŲÖĘėCµÄĖŁ¶ČŗĶ·½Ļņ£¬ÓŠĖÄ·NÅäÖĆ·½Ź½£ŗĪĻą£Ø2Ā·Ć}_Ż³ö£©”¢ėpĻą£Ø2Ā·Ć}_Ż³ö£©”¢A/BĻąĪ»Õż½»£Ø2Ā·Ć}_Ż³ö£©”¢ĪĻą£Ø1Ā·Ć}_Ż³ö£©£»
DISŠÅĢéŌ“ŠĶŻ³ö£¬ÓĆķ½ūÖ¹»ņŹ¹Äܲ½ßMņÓĘ÷»ņĖÅ·žņÓĘ÷£»
Čżß\ÓŻSµÄP0”¢P1ŗĶDIS¦ŖµÄŻ³öĶصĄČēĻĀ±ķ£ŗ
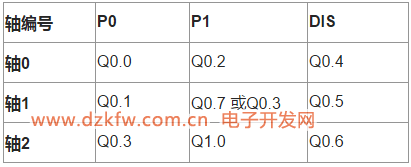
×¢Ņā£ŗČē¹ūŻS1½MBéĪĻąÉĀ·Ż³ö£ØĆ}_+·½Ļņ£©£¬tP1·ÖÅäµ½Q0.7£»Čē¹ūŻS1½MBéėpĻņŻ³ö»ņÕßA/BĻąŻ³ö£¬tP1±»·ÖÅäµ½Q0.3£¬µ«“ĖrŻS2¢²»ÄÜŹ¹ÓĆ£»
³żĮĖŻ³öŠÅĢ£¬Ćæß\ÓŻSßÓŠ¦ŖµÄŻČėŠÅĢ£¬±ČČē¹¤×÷Å_µÄ×óÓŅĻŽĪ»ŠÅĢ”¢ ¢æ¼ücŠÅĢ”¢ĮćĆ}_ŠÅĢµČµČ”£ĻĀĆęß@±ķøńŹĒCPUŻČėĶصĄ¦ŖµÄß\ÓŻSŠÅĢ£ŗ
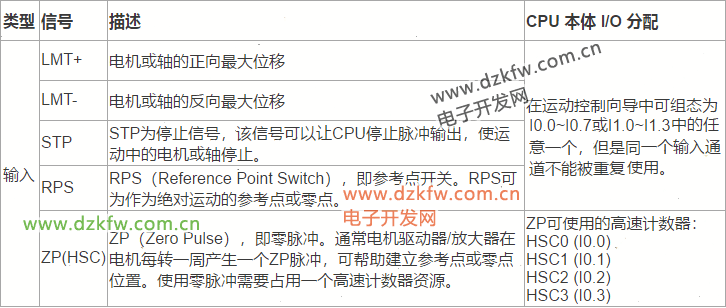
S7-200 SMARTĢį¹©ß\ÓæŲÖĘĻņ§¦ß\ÓŻSßMŠŠ½MB£»ß\ÓŻSµÄyĮæĻµ½yæÉŅŌŹĒ¹¤³ĢĪĪ»£Ø±ČČēmm£©£¬Ņ²æÉŅŌŹĒĆ}_µ£»Ö§³Ö½^¦Ī»ÖĆ”¢Ļą¦Ī»ÖƵÄß\Ó£»Ö§³Ö ¢æ¼üc²éÕŅ£»Ģį¹©æɽMBµÄ·“_Ńa£»×ī¶ąÖ§³Ö32½MĒś¾£¬Ćæ½MĒś¾×ī¶ąÖ§³Ö16 ²½£»Ģį¹©ß\ÓæŲÖĘĆę°åÓĆÓŚŹÖÓÕ{Ō£»
³żĮĖß\ÓæŲÖĘĻņ§£¬Ņ²æÉŅŌĶØß^PLSÖøĮīķæŲÖĘPTOŠÅĢµÄŻ³ö”£ß@Š©ČČŻ¢ŌŚŗóĄmĪÄÕĀÖŠŌ¼½é½B”£
 ·µ»Ųķ²æ
·µ»Ųķ²æ Ė¢ŠĀķĆę
Ė¢ŠĀķĆę ĻĀµ½ķµ×
ĻĀµ½ķµ×