
PLC┐žųŲĄ─īŻė├ūįäė╣źĮzŽĄĮy(t©»ng)įO(sh©©)ėŗ
š¬ę¬Ż║ßśī”─│Ų¾śI(y©©)īŻė├┴Ń╝■╣źĮz╔·«a(ch©Żn)ą¦┬╩Ą═Īó╝ė╣żŠ½Č╚▓ŅĄ╚å¢Ņ}Ż¼įO(sh©©)ėŗ┴╦īŻė├ūįäė╣źĮzŽĄĮy(t©»ng)ĪŻįōŽĄĮy(t©»ng)ų„ę¬ęį╬„ķTūė200ŽĄ┴ąPLC×ķų„┐žųŲŲ„Ż¼╦╔Ž┬A5ŽĄ┴ą╦┼Ę■ļŖÖC×ķł╠(zh©¬)ąąÖCśŗ(g©░u)Ż¼┼õ╠ū╦┼Ę■“ī(q©▒)äėŲ„×ķė▓╝■ŲĮ┼_ĪŻ╩╣ė├STEP7-Micro/WIN▄ø╝■ŠÄīæųĖ┴Ņ«a(ch©Żn)╔·Ė▀╦┘├}ø_┤«īŹ¼F(xi©żn)╦┼Ę■“ī(q©▒)äėŲ„Ą─╬╗ų├┐žųŲŻ¼ūŅĮKīŹ¼F(xi©żn)┴╦ĮzÕFī”┴Ń╝■Ą─Š½┤_Č©╬╗╝ė╣żĪŻŽĄĮy(t©»ng)▓┘ū„║åå╬Īó▀\ąą░▓╚½ĘĆ(w©¦n)Č©Ż¼╠ßĖ▀┴╦╔·«a(ch©Żn)ą¦┬╩Ż¼ĮĄĄ═┴╦╝ė╣ż│╔▒ŠĪŻ
ĻP(gu©Īn)µIį~Ż║īŻė├ūįäė╣źĮzŽĄĮy(t©»ng)Ż╗PLCŻ╗╦┼Ę■ļŖÖCŻ╗╬╗ų├┐žųŲ
0ĪĪę²čį
į┌ūįäė╗»╔·«a(ch©Żn)Īó╝ė╣żųŲįņ▀^│╠ųąŻ¼Įø(j©®ng)│ŻąĶę¬ī”╝ė╣ż┴Ń┼õ╝■▀Mąą╣źĮzŻ¼╚╗Č°é„Įy(t©»ng)Ą─╝ė╣żįO(sh©©)éõ╔·«a(ch©Żn)ą¦┬╩Ą═Ż¼Ūę«a(ch©Żn)ŲĘ╣źĮzŠ½Č╚▓╗─▄▒ŻūCĪŻ─┐Ū░╩ął÷╔ŽĄ─ūįäė╣źĮzįO(sh©©)éõārĖ±░║┘FŻ¼▓┘ū„Å═ļsŻ¼×ķØMūŃ┐ņ╦┘Ė▀Š½Č╚Ą─╝ė╣żę¬Ū¾Ż¼į┌▀\äė┐žųŲŽĄĮy(t©»ng)ųąŻ¼═©│Żęį╦┼Ę■ļŖÖCū„×ķ“ī(q©▒)äėįO(sh©©)éõĪŻ▒Š╬─ĮY(ji©”)║ŽPLC┐╣Ė╔ö_─▄┴”ÅŖĪóĘĆ(w©¦n)Č©ąį║├Ą╚ā×(y©Łu)³cŻ¼▓╔ė├╬„ķTūėPLC┐žųŲ╦┼Ę■ļŖÖCĄ─ą²▐D(zhu©Żn)▀\äė▓óīóŲõ▐D(zhu©Żn)╗»×ķĮzÕFĄ─ų▒ŠĆ▀\äė▀@ę╗╦╝ŽļŻ¼įO(sh©©)ėŗ┴╦īŻė├ūįäė╣źĮzŽĄĮy(t©»ng)ĪŻ
1ĪĪ┐žųŲŽĄĮy(t©»ng)ĘĮ░Ė
1.1ĪĪūįäė╣źĮzŽĄĮy(t©»ng)ų„ę¬ĮM│╔
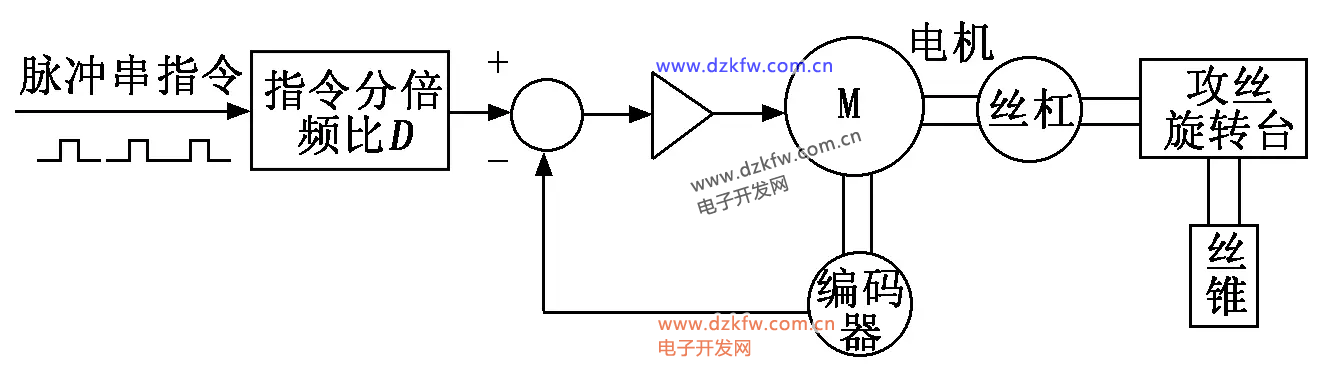
łD1×ķūįäė╣źĮzŽĄĮy(t©»ng)╣żū„╩ŠęŌłDĪŻ▒ŠŽĄĮy(t©»ng)ų„ę¬ė╔▓┘ū„┼_┐žųŲPLC░l(f©Ī)╦═├}ø_ųĖ┴ŅüĒ┐žųŲ╦┼Ę■“ī(q©▒)äėŲ„Ż¼╦┼Ę■“ī(q©▒)äėŲ„░čĮė╩šĄĮĄ─├}ø_ą┼╠¢▐D(zhu©Żn)╗»×ķļŖą┼╠¢üĒ“ī(q©▒)äė╦┼Ę■ļŖÖCĄ─▐D(zhu©Żn)äėÅ─Č°┐žųŲĮzÕFą²▐D(zhu©Żn)┼_╔ŽĄ─ĮzÕFī”╣ż╝■▀Mąą╣źĮzĪŻĖ∙ō■(j©┤)▒╗┐žī”Ž¾║═▌ö╚ļ▌ö│÷ą┼╠¢Ą─öĄ(sh©┤)┴┐ĪóŅÉą═╝░┐žųŲę¬Ū¾[2-3]Ż¼øQČ©▓╔ė├╬„ķTūėPLC CPU224XP CN DC\DC\DCū„×ķų„┐žųŲŲ„Ż¼┐╝æ]ĄĮ╔·«a(ch©Żn)╝ė╣żŠ½Č╚ę¬Ū¾Ż¼▀xė├┬▌ŠÓ×ķ5 mmĄ─ĮzĖ▄Ż¼ĮzÕFęÄ(gu©®)Ė±M5ĪŻ×ķĘĮ▒Ńė├æ¶╩╣ė├Ż¼į┌▓┘ū„┼_╔ŽĘųäeįO(sh©©)ų├┴╦åóäė░┤Ōo║══Żų╣░┤ŌoŻ¼╣żū„┼_Ą─┴Ń³cČ©╬╗║═│¼│╠Ž▐╬╗ė╔Ė▀Š½Č╚ļŖĖą╩ĮĮėĮ³ķ_ĻP(gu©Īn)īŹ¼F(xi©żn)Ż¼ŲõųąAĪóB╠Ä×ķŽ▐╬╗ķ_ĻP(gu©Īn)Ż¼O╠Ä×ķįŁ³cÖz£yķ_ĻP(gu©Īn)ĪŻ
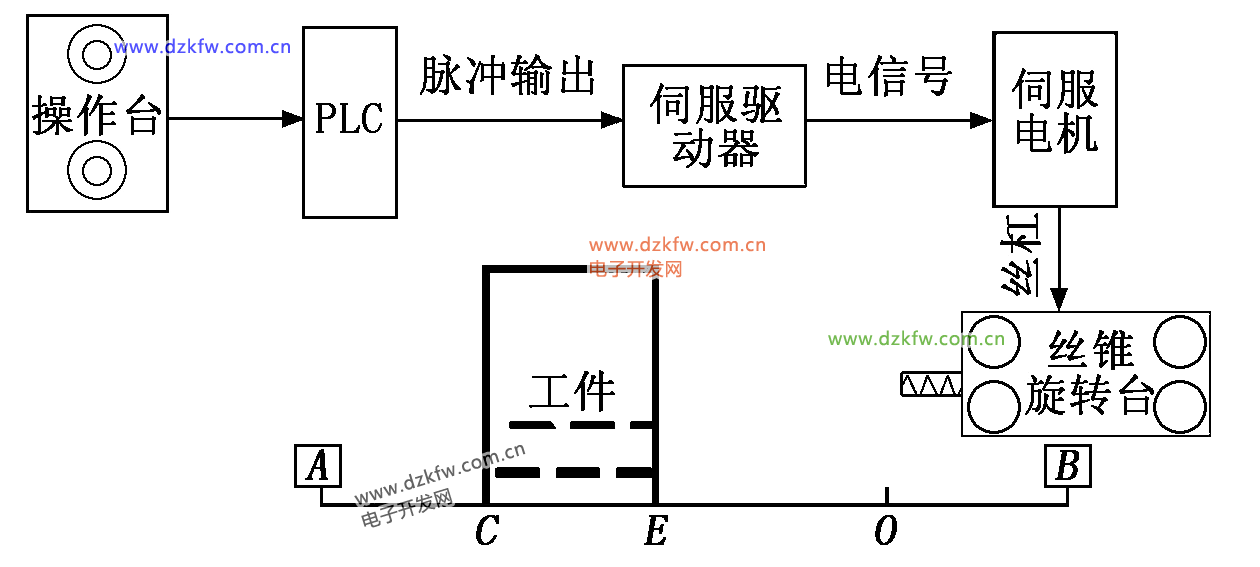
łD1ĪĪūįäė╣źĮzŽĄĮy(t©»ng)╣żū„╩ŠęŌłD
1.2ĪĪ╦┼Ę■ļŖÖCĄ─▀x╚Ī┼c┐žųŲĘĮ╩ĮĄ─▀xō±
Ė∙ō■(j©┤)ļŖÖC╦∙ąĶžō▌d┼ż┴”Īó╦┘Č╚ĪóŠ½Č╚Ą╚ę¬Ū¾Ż¼▒ŠŽĄĮy(t©»ng)▀xė├╦╔Ž┬Į╗┴„╦┼Ę■ļŖÖCMSME041G1Ż¼┼õ╠ū╦┼Ę■“ī(q©▒)äėŲ„MCDHT3120ū„×ķ▒ŠŽĄĮy(t©»ng)Ą─äė┴”▓┐ĘųĪŻė╔ė┌╬╗ų├┐žųŲ─Ż╩Į╩Ū═©▀^═Ō▓┐▌ö╚ļ├}ø_ųĖ┴ŅüĒ┤_Č©▐D(zhu©Żn)äė▌S▐D(zhu©Żn)äė╦┘Č╚Ą─┐ņ┬²┼c▐D(zhu©Żn)äėĄ─ĮŪČ╚Ż¼╣╩▒ŠŽĄĮy(t©»ng)▓╔ė├╬╗ų├┐žųŲ─Ż╩Į┐žųŲ╦┼Ę■ļŖÖCĄ─åó═ŻĪóš²▐D(zhu©Żn)║═Ę┤▐D(zhu©Żn)ĪŻ
2ĪĪ┐žųŲŽĄĮy(t©»ng)Ą─ļŖ┬ĘįO(sh©©)ėŗ
2.1ĪĪ┐žųŲŽĄĮy(t©»ng)įŁ└Ē
łD2×ķ┐žųŲŽĄĮy(t©»ng)įŁ└ĒłDĪŻPLC░┤šš╦∙ŠÄīæĄ─│╠ą“ųĖ┴Ņ░l(f©Ī)╦═├}ø_ą┼╠¢Įo╦┼Ę■“ī(q©▒)äėŲ„Ż¼Įø(j©®ng)▀^×V▓©▒ČŅl╠Ä└Ē║¾▌ö│÷ŽÓæ¬ļŖą┼╠¢▓ó▐D(zhu©Żn)ōQ│╔ļŖäėÖC▌S╔ŽĄ─ĮŪ╬╗ęŲ╗“ĮŪ╦┘Č╚Ż¼═©▀^▌S╔ŽĄ─┬ō(li©ón)▌SŲ„Ħäė╣źĮzą²▐D(zhu©Żn)┼_╔ŽĄ─ĮzĖ▄╩╣ĮzÕFū÷ų▒ŠĆ▀\äėŻ¼ę“┤╦ų╗ąĶ꬚{(di©żo)╣Ø(ji©”)▌ö│÷Ą─├}ø_ą┼╠¢Š═┐╔ęįķgĮė═Ļ│╔ĮzÕFęŲäėĄ─╦┘Č╚║═ŠÓļx┐žųŲĪŻęčų¬ŠÄ┤aŲ„ęÄ(gu©®)Ė±×ķ20 bit,ļŖÖCĄ─Ņ~Č©▐D(zhu©Żn)╦┘×ķ3 000 r/minŻ¼ĮzĖ▄═©▀^┬ō(li©ón)▌SŲ„ų▒Įė┼c╦┼Ę■ļŖÖC┬ō(li©ón)ĮėŻ¼é„äė▒╚×ķ1Ī├1Ż¼ŲõųąŽ┬Ž▐╬╗é„ĖąŲ„╦∙į┌╬╗ų├AŠÓļx╣ż╝■Ąū├µC╩Ū20 mmŻ¼╔ŽŽ▐╬╗é„ĖąŲ„B╦∙į┌╬╗ų├ŠÓļxįŁ³cO╩Ū20 mmŻ¼ĮzÕFį┌įŁ³cOŠÓļx╣ż╝■▒Ē├µEĄ─┤╣ų▒Ė▀Č╚╩Ū100 mmŻ¼╣ż╝■ąĶę¬╣źĮzĄ─│▀┤ń×ķ60 mmĪŻĮY(ji©”)║Ž╝ė╣żŠ½Č╚┼c╔·«a(ch©Żn)ą¦┬╩┐╝æ]Ż¼įO(sh©©)Č©╬╗ų├Ęų▒µ┬╩”żM=0.005 mmŻ¼ätųĖ┴ŅĘų▒ČŅl▒╚ =
= ĪŻ
ĪŻ
Å─įŁ³c╬╗ų├O▀\äėĄĮ╣ż╝■▒Ē├µ╬╗ų├E╦∙ąĶ├}ø_öĄ(sh©┤) =2.0Ī┴104Ż¼
=2.0Ī┴104Ż¼
Å─╣ż╝■▒Ē├µE╬╗ų├╣źĮzĄĮ─┐ś╦╬╗ų├C╦∙ąĶ├}ø_öĄ(sh©┤) =1.2Ī┴104ĪŻ
=1.2Ī┴104ĪŻ
2.2ĪĪ╦┼Ę■ļŖÖC┼c“ī(q©▒)äėŲ„ļŖ┬ĘįO(sh©©)ėŗ
łD3×ķ╦┼Ę■“ī(q©▒)äėŲ„ų„ę¬ĮėŠĆłDĪŻłD3ųąŻ¼L1ĪóL2ĪóL3×ķ╦┼Ę■“ī(q©▒)äėŲ„Ą─ų„╗ž┬ĘļŖį┤ĮėŠĆČ╦ūėŻ¼L1CĪóL2C×ķ┐žųŲ╗ž┬ĘļŖį┤ĮėŠĆČ╦ūėŻ¼▓ó┬ō(li©ón)║¾Įė╚ļĮ╗┴„220 VļŖį┤Ż╗UĪóVĪóW×ķ▌ö│÷ļŖÖCĄ─ļŖį┤ĮėŠĆČ╦ūėŻ¼PE×ķļŖÖCĄ─ĄžŠĆČ╦ūėŻ¼╦┼Ę■ļŖÖCŠÄ┤aŲ„ŠĆ┼c“ī(q©▒)äėŲ„X6Įė┐┌ī”ĮėŻ╗ALM+/ALM-×ķł¾Š»ą┼╠¢▌ö│÷Č╦ūė,ALM-ĮėPLC▌ö╚ļČ╦ūėI0.2Ż╗RDY+/RDY-×ķ╦┼Ę■£╩éõą┼╠¢▌ö│÷Č╦ūėŻ¼RDY-Įė╚ļPLC▌ö╚ļČ╦ūėI0.3Ż╗GND×ķą┼╠¢ĮėĄžČ╦ūėŻ¼COM+┼c═ŌĮė24 Vų▒┴„ļŖį┤Ą─š²śOŽÓ▀BŻ¼COM-┼c═ŌĮė24 Vų▒┴„ļŖį┤Ą─žōśOŽÓ▀BŻ╗├}ø_ą┼╠¢Č╦ūėPULS1/PULS2┼cĘĮŽ“ą┼╠¢Č╦ūėSING1/SING2×ķ╬╗ų├┐žųŲ─Ż╩ĮŽ┬╦∙╠žėąĄ─ā╔┬Ęą┼╠¢Č╦ūėŻ¼PULS1▀BĮėPLCĄ─▌ö│÷Č╦ūėQ0.0Ż¼SING1▀BĮėPLCĄ─▌ö│÷Č╦ūėQ0.2Ż¼×ķ╩╣▌ö╚ļļŖ┴„▒Ż│ųį┌╦┼Ę■“ī(q©▒)äėŲ„į╩įSĄ─ĘČć·ā╚(n©©i)Ż¼┤╦ĢrĖ„ąĶ┤«┬ō(li©ón)ę╗éĆ2 k”ĖĄ─ļŖūĶŻ¼«öĘĮŽ“ą┼╠¢Č╦ūėĮė╩šą┼╠¢ūā╗»ĢrŻ¼╦┼Ę■ļŖÖCĄ─▀\▐D(zhu©Żn)ĘĮŽ“░l(f©Ī)╔·Ė─ūāŻ¼Š▀¾w▐D(zhu©Żn)äėĘĮŽ“┼c╦∙įO(sh©©)ģóöĄ(sh©┤)ėąĻP(gu©Īn)Ż╗S-ON×ķ╦┼Ę■╩╣─▄ą┼╠¢▌ö╚ļČ╦ūėŻ¼▀BĮė24 Vų▒┴„ļŖį┤žōśOĪŻ
łD2ĪĪ┐žųŲŽĄĮy(t©»ng)įŁ└ĒłD
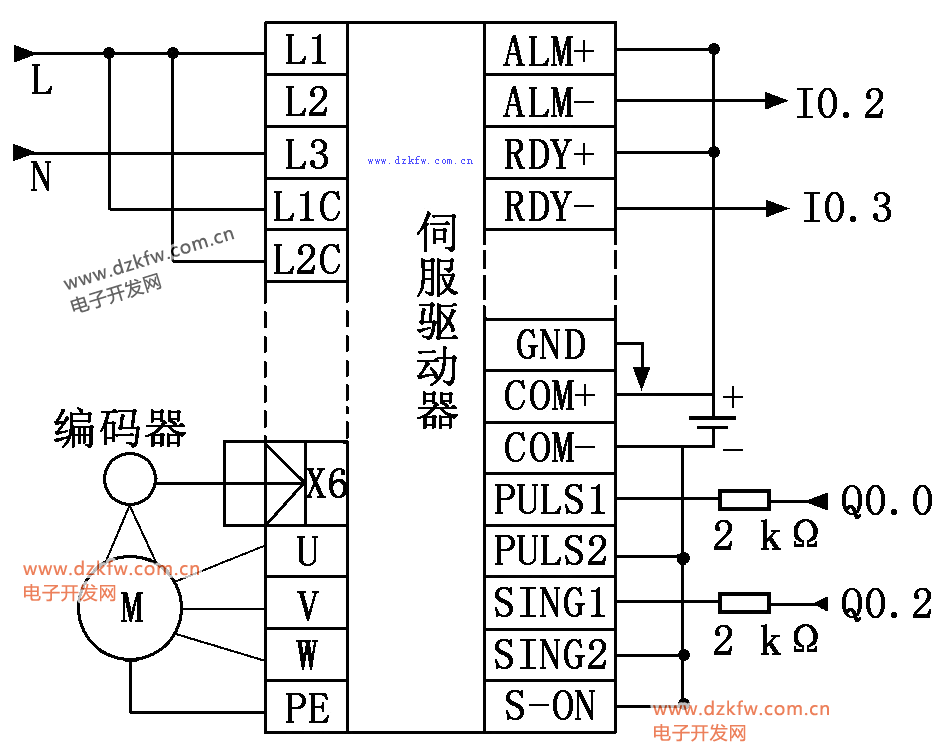
łD3ĪĪ╦┼Ę■“ī(q©▒)äėŲ„ų„ę¬ĮėŠĆłD
2.3ĪĪI/OĄžųĘĘų┼õ
PLC▓╔ė├PTO├}ø_┤«▌ö│÷ĘĮ╩ĮüĒīŹ¼F(xi©żn)╦┼Ę■ļŖÖCĄ─╬╗ų├┐žųŲŻ¼Ė∙ō■(j©┤)╔Ž╩÷įO(sh©©)ų├Ą─ļŖūė²X▌å▒╚┐╔ų¬ļŖÖC├┐ę╗▐D(zhu©Żn)╦∙ąĶĄ─├}ø_öĄ(sh©┤)×ķ1 000Ż¼╚ń╣¹ļŖÖC▀\ąąį┌ūŅĖ▀╦┘Č╚Ż¼
ätPLC▌ö│÷├}ø_Ņl┬╩×ķ =50 kHzĪŻė╔ė┌CPU224XPCNŠ¦¾w╣▄▌ö│÷ūŅĖ▀Ņl┬╩▀_100 kHzŻ¼╣╩▀xė├CPU224XP CN DC/DC/DC┐╔ęįØMūŃ╔Ž╩÷ę¬Ū¾ĪŻ┤╦ą═╠¢CPU┼õų├ėąā╔éĆā╚(n©©i)ų├├}ø_░l(f©Ī)╔·Ų„Č╦┐┌Q0.0║═Q0.1Ż¼ęįQ0.0ū„×ķ╦┼Ę■“ī(q©▒)äėŲ„Ą─├}ø_▌ö╚ļČ╦ūėŻ¼Ė∙ō■(j©┤)Ęų╬÷Ą├ĄĮĄ─PLC I/OĘų┼õ╚ń▒Ē1╦∙╩ŠĪŻ
=50 kHzĪŻė╔ė┌CPU224XPCNŠ¦¾w╣▄▌ö│÷ūŅĖ▀Ņl┬╩▀_100 kHzŻ¼╣╩▀xė├CPU224XP CN DC/DC/DC┐╔ęįØMūŃ╔Ž╩÷ę¬Ū¾ĪŻ┤╦ą═╠¢CPU┼õų├ėąā╔éĆā╚(n©©i)ų├├}ø_░l(f©Ī)╔·Ų„Č╦┐┌Q0.0║═Q0.1Ż¼ęįQ0.0ū„×ķ╦┼Ę■“ī(q©▒)äėŲ„Ą─├}ø_▌ö╚ļČ╦ūėŻ¼Ė∙ō■(j©┤)Ęų╬÷Ą├ĄĮĄ─PLC I/OĘų┼õ╚ń▒Ē1╦∙╩ŠĪŻ
▒Ē1ĪĪPLCĄ─I/OĘų┼õ
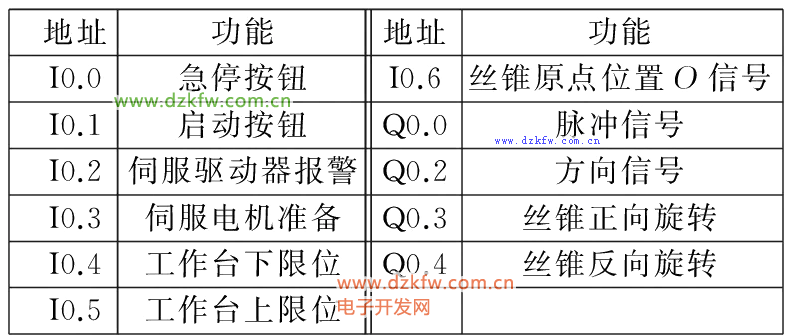
ĄžųĘ╣”─▄ĄžųĘ╣”─▄I0.0╝▒═Ż░┤ŌoI0.6ĮzÕFįŁ³c╬╗ų├Oą┼╠¢I0.1åóäė░┤ŌoQ0.0├}ø_ą┼╠¢I0.2╦┼Ę■“ī(q©▒)äėŲ„ł¾Š»Q0.2ĘĮŽ“ą┼╠¢I0.3╦┼Ę■ļŖÖC£╩éõQ0.3ĮzÕFš²Ž“ą²▐D(zhu©Żn)I0.4╣żū„┼_Ž┬Ž▐╬╗Q0.4ĮzÕFĘ┤Ž“ą²▐D(zhu©Żn)I0.5╣żū„┼_╔ŽŽ▐╬╗
3ĪĪŽĄĮy(t©»ng)▄ø╝■įO(sh©©)ėŗ
3.1ĪĪ╦┼Ę■“ī(q©▒)äėŲ„ų„ę¬ģóöĄ(sh©┤)įO(sh©©)ų├
╦┼Ę■“ī(q©▒)äėŲ„ų„ę¬ģóöĄ(sh©┤)įO(sh©©)ų├ęŖ▒Ē2ĪŻŲõųąŻ¼Pr0.00įO(sh©©)×ķ0Ż¼š²Ž“ųĖ┴ŅĢrŻ¼Å─▌Sé╚(c©©)┐┤ļŖÖC×ķĒśĢrßśĘĮŽ“ą²▐D(zhu©Żn)Ż¼žōŽ“ųĖ┴ŅĢrŻ¼Å─▌Sé╚(c©©)┐┤ļŖÖC×ķ─µĢrßśĘĮŽ“ą²▐D(zhu©Żn)Ż╗ģóöĄ(sh©┤)Pr0.01×ķ┐žųŲ─Ż╩Į▀xō±Ż¼įO(sh©©)ų├0×ķ╬╗ų├┐žųŲ─Ż╩ĮŻ╗Pr0.05×ķųĖ┴Ņ├}ø_▌ö╚ļ─Ż╩Į▀xō±╣”─▄┤·┤aŻ¼įO(sh©©)ų├0×ķ╣ŌļŖ±Ņ║ŽŲ„▌ö╚ļŻ╗Pr0.06×ķųĖ┴Ņ├}ø_śOąįįO(sh©©)ų├╣”─▄┤·┤aŻ¼Pr0.07×ķųĖ┴Ņ├}ø_▌ö╚ļ─Ż╩Į▀xō±╣”─▄┤·┤aŻ¼ā╔ųĖ┴ŅĒÜ┼õ║Ž╩╣ė├Ż¼▒Š┐žųŲŽĄĮy(t©»ng)▓╔ė├├}ø_ą“┴ą+Ę¹╠¢├}ø_┤«▌ö│÷ą╬╩ĮŻ¼įO(sh©©)Č©Pr0.06=0,Pr0.07=3Ż╗Pr0.09┼cPr0.10Ęųäe×ķųĖ┴ŅĘų▒ČŅlĄ─Ęųūė┼cĘų─ĖģóöĄ(sh©┤)įO(sh©©)ų├╣”─▄┤·┤aŻ¼ė╔ė┌ųĖ┴ŅĘų▒ČŅl▒╚D=1 048 576/1 000,įO(sh©©)ų├Pr0.09=1 048 576,Pr0.10=1 000ĪŻ
▒Ē2ĪĪ╦┼Ę■“ī(q©▒)äėŲ„ų„ę¬ģóöĄ(sh©┤)įO(sh©©)ų├
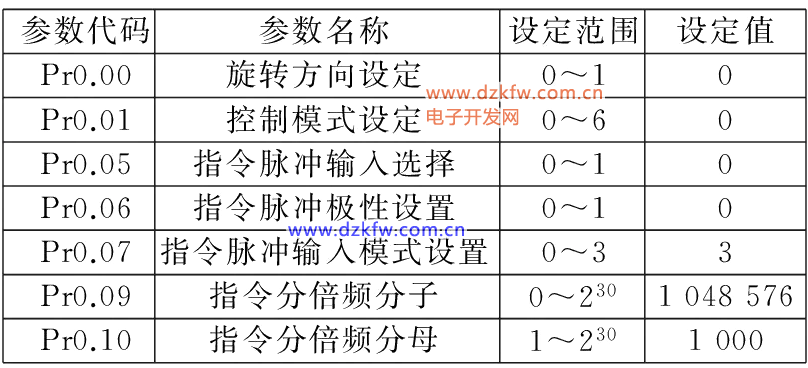
ģóöĄ(sh©┤)┤·┤aģóöĄ(sh©┤)├¹ĘQįO(sh©©)Č©ĘČć·įO(sh©©)Č©ųĄPr0.00ą²▐D(zhu©Żn)ĘĮŽ“įO(sh©©)Č©0Ī½10Pr0.01┐žųŲ─Ż╩ĮįO(sh©©)Č©0Ī½60Pr0.05ųĖ┴Ņ├}ø_▌ö╚ļ▀xō±0Ī½10Pr0.06ųĖ┴Ņ├}ø_śOąįįO(sh©©)ų├0Ī½10Pr0.07ųĖ┴Ņ├}ø_▌ö╚ļ─Ż╩ĮįO(sh©©)ų├0Ī½33Pr0.09ųĖ┴ŅĘų▒ČŅlĘųūė0Ī½2301048576Pr0.10ųĖ┴ŅĘų▒ČŅlĘų─Ė1Ī½2301000
3.2ĪĪ┐žųŲ▀^│╠Ęų╬÷
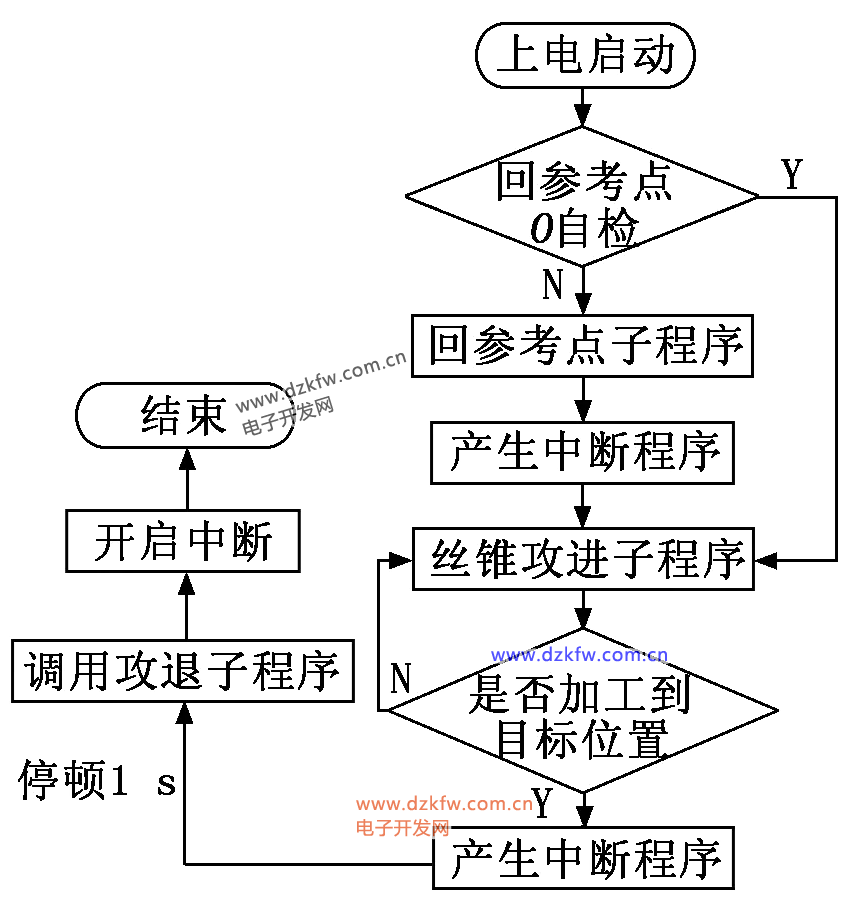
łD4×ķPLC┐žųŲŽĄĮy(t©»ng)┴„│╠ĪŻ╔ŽļŖ░┤Ž┬åóäė░┤ŌoŻ¼PLC╩ūŽ╚Ģ■▀Mąą│╠ą“│§╩╝╗»Ż¼Öz£y¤o«É│Żł¾Š»║¾Ż¼╚¶ĮzÕFø]ėą╗žĄĮįŁ³c╬╗ų├OŻ¼ätåóäė╗žģó┐╝³cūė│╠ą“▀Mąą╗žįŁ³c▓┘ū„Ż¼┤_šJĮzÕF╗žĄĮįŁ³c╬╗ų├O║¾Ż¼ĮzÕFķ_╩╝▐D(zhu©Żn)äėŻ¼š{(di©żo)ė├ĮzÕF▀MĄČ╝ė╣żūė│╠ą“Ż¼PLC░l(f©Ī)│÷├}ø_ą┼╠¢Ż¼ĮzÕFÅ─įŁ³c╬╗ų├OĮø(j©®ng)▀^Ž╚╝ė╦┘║¾║Ń╦┘į┘£p╦┘ĄĮ▀_╣ż╝■▒Ē├µE╬╗ų├Ż¼į┘║Ń╦┘▀MĮoĄĮ─┐ś╦╬╗ų├CŻ¼═Żų╣▀MĄČ1 s║¾Ż¼š{(di©żo)ė├ĮzÕF═╦ĄČūė│╠ą“Ż¼ĮzÕF┼c╦┼Ę■ļŖÖCĘ┤ĘĮŽ“║Ń╦┘═╦╗žĄĮ╣ż╝■▒Ē├µE╬╗ų├Ż¼Įø(j©®ng)▀^Ž╚╝ė╦┘║¾║Ń╦┘į┘£p╦┘═╦╗žĄĮįŁ³cO╬╗ų├║¾Ż¼ŽĄĮy(t©»ng)═ŻÖCŻ¼Ą╚┤²Ž┬┤╬åóäėĪŻ┤╦Ģr═Ļ│╔┴╦ę╗éĆ╣żū„裣h(hu©ón)Ż¼├┐³cäėę╗┤╬åóäė░┤Ōo═Ļ│╔ę╗éĆ┴Ń╝■Ą─╝ė╣żŻ¼╚ń┤╦Ę┤Å═裣h(hu©ón)═Ļ│╔ī”┼·┴┐┴Ń╝■Ą─╣źĮzĪŻ
łD4ĪĪPLC┐žųŲŽĄĮy(t©»ng)┴„│╠
3.3ĪĪ│╠ą“įO(sh©©)ėŗ
PLC═©▀^Ė▀╦┘├}ø_░l(f©Ī)╔·Č╦┐┌Q0.0▌ö│÷Ą─├}ø_Ņl┬╩üĒ┐žųŲ╦┼Ę■ļŖÖC▌S▐D(zhu©Żn)äė┐ņ┬²Ż¼ė╔▌ö│÷├}ø_Ą─éĆöĄ(sh©┤)üĒ┐žųŲ╦┼Ę■ļŖÖC▐D(zhu©Żn)äėĄ─ĮŪČ╚Ż¼Įø(j©®ng)▀^ī”ŽĄĮy(t©»ng)╣żū„┴„│╠▀MąąĘų╬÷Ż¼Ė∙ō■(j©┤)«a(ch©Żn)ŲĘ╝ė╣ż╔·«a(ch©Żn)ą¦┬╩┼c┘|(zh©¼)┴┐ę¬Ū¾Ż¼▓╔ė├─ŻēK╗»ŠÄ│╠įO(sh©©)ėŗ╦╝ŽļŻ¼īóūįäė╣źĮzŽĄĮy(t©»ng)│╠ą“Ęų×ķų„│╠ą“╝ė3éĆūė│╠ą“║═3éĆųąöÓ│╠ą“Ż¼│╠ą“ĮY(ji©”)śŗ(g©░u)╚ńłD5╦∙╩ŠĪŻ
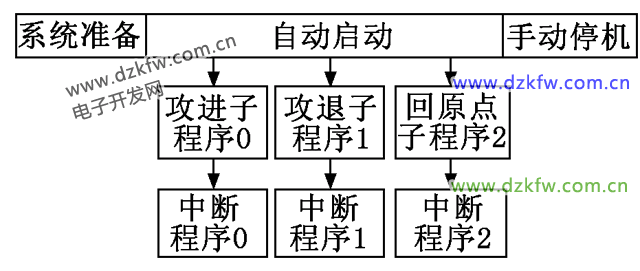
łD5ĪĪ│╠ą“ĮY(ji©”)śŗ(g©░u)
4ĪĪĮY(ji©”)╩°šZ
═©▀^Ęų╬÷īŻė├┴Ń╝■╣źĮz▀^│╠┼c«a(ch©Żn)ŲĘ╝ė╣żę¬Ū¾Ż¼└¹ė├╬„ķTūėPLC┼c╦╔Ž┬╦┼Ę■ļŖÖCŽÓĮY(ji©”)║ŽŻ¼▓╔ė├╦┼Ę■ļŖÖC╬╗ų├┐žųŲ─Ż╩ĮŻ¼įO(sh©©)ėŗ┴╦īŻė├ūįäė╣źĮzŽĄĮy(t©»ng)Ż¼ŽĄĮy(t©»ng)ūįäė╗»│╠Č╚Ė▀Ż¼╠ßĖ▀┴╦╔·«a(ch©Żn)ą¦┬╩;║Ž└Ē└¹ė├ų„ÖCūįĦĄ─ā╔┬ĘĖ▀╦┘├}ø_▌ö│÷Č╦┐┌┐žųŲ╦┼Ę■ļŖÖCĄ─▀\äėŻ¼╣Ø(ji©”)╝s┴╦│╔▒ŠĪŻŲõæ¬ė├▀Ć┐╔ęįöUš╣ĄĮŅÉ╦ŲĄ─ā╔┼_╦┼Ę■ļŖÖC╗“▓Į▀MļŖÖC┐žųŲĄ─╝ė╣żįO(sh©©)éõųąŻ¼ī”ŅÉ╦ŲĄ─▀\äė┐žųŲĘĮ╩ĮŠ▀ėąę╗Č©Ą─ģó┐╝ĮĶĶbārųĄĪŻ
ģó┐╝╬─½IŻ║
[1]Åłé„┴ų,ąņ╩└įS,═§╩└╝t,Ą╚.╦┼Ę■ŽĄĮy(t©»ng)į┌ūįäė╣źĮz╔·«a(ch©Żn)ŠĆ╔ŽĄ─æ¬ė├.ÖCąĄųŲįņ┼cūįäė╗»,2010,39(1):146-147.
[2]└ŅŪÕŽŃ,ČĪĢrõh,ą▄āĆ,Ą╚.PLC┐žųŲĄ─ę║ē║╝¶░ÕÖCŽĄĮy(t©»ng)įO(sh©©)ėŗ.ÖCąĄįO(sh©©)ėŗ┼cųŲįņ,2007(11):156-157.
[3]³S▌x,║┬ĢįĻž,ŚŅĶF┼Ż,Ą╚.PLC┐žųŲĄ─īŻė├Ń@┐ūŽĄĮy(t©»ng)įO(sh©©)ėŗ.ÖCąĄįO(sh©©)ėŗ┼cųŲįņ,2009(11):63-65.
[4]äóµ┬µ┬,Åł╚ńŲ╝,Åłš²║═,Ą╚.╗∙ė┌╦┼Ę■ļŖÖC║═PLCĄ─╣żū„┼_▀\äė┐žųŲ.ÖCąĄ╣ż│╠┼cūįäė╗»,2012(4):126-128.
[5]║·╝č¹É,ķZīÜ╚,Åł░▓š,Ą╚.S7-200 PLCį┌╦┼Ę■ļŖÖC╬╗ų├┐žųŲųąĄ─æ¬ė├.ūįäė╗»āx▒Ē,2009,30(12):38-41.
[6]äó▒ŠīW,╔Ļ┐Ī,ČŁäé,Ą╚.Ė▀ą¦ūįäė╣źĮzÖCĄ─įO(sh©©)ėŗ╝░┐žųŲ蹊┐.ųŲįņśI(y©©)ūįäė╗»,2014(21):87-90.
╬─š┬ŠÄ╠¢Ż║1672-6413(2016)04-0149-02
╩šĖÕ╚šŲ┌Ż║2015-12-04Ż╗
ą▐ėå╚šŲ┌Ż║2016-05-19
ū„š▀║åĮķŻ║ŚŅéb(1978-)Ż¼─ąŻ¼║■▒▒░▓Ļæ╚╦Ż¼Į╠╩┌Ż¼▓®╩┐Ż¼┤T╩┐╔·ī¦Ä¤Ż¼ų„ę¬Å─╩┬╩»ė═ÖCąĄĪó╗»╣żÖCąĄĪóļŖÜŌūįäė╗»ĘĮ├µĄ─蹊┐ĪŻ
ųąłDĘųŅÉ╠¢Ż║TP273
╬─½Iś╦ūR┤aŻ║A
Design of Special Automatic Tapping System Based on PLC
YANG Xia, LI Shu-peng, XIAO Ang, GUO Zhao
(School of Mechanical and Electrical Engineering, Wuhan Institute of Technology, Wuhan 430073,China)
AbstractŻ║ A special automatic tapping system is designed to improve production efficiency and machining precision of the special tapping parts by cooperating with the enterprise. The system is mainly comprised of Siemens 200 series PLC that is the main controller, Panasonic A5 series servo motor as the actuator, matching servo drive as hardware platform. By using STEP7-Micro/WIN software to write instructions to generate high-speed pulse sequence, the position control of AC servo driver is achieved, it has finally achieved the precise positioning fabrication of the parts. The system operation is simple, safe and stable, which improves the production efficiency and reduces the manufacturing cost. It will has a good application foreground in the aspect of special components bath tapping, and the control method has certain reference value for similar automation production equipment.
Key wordsŻ║ special automatic tapping system; PLC; position control
*ć°╝ęūį╚╗┐ŲīW╗∙Į┘Yų·ĒŚ─┐(51276131)
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū