
│²┴╦╩╣ė├▀\äė┐žųŲŽ“ī¦Ż¼S7-200 SMART▀Ćų¦│ų╩╣ė├PLSųĖ┴Ņ▌ö│÷PTO├}ø_ą┼╠¢ĪŻ
į┌STEP 7 Micro-WIN/SMARTĄ─ĪŠųĖ┴ŅĪ┐Ī¬ĪŠėŗöĄŲ„Ī┐ųą┐╔ęįšęĄĮPLSųĖ┴ŅŻ¼╚ńŽ┬łD╦∙╩ŠŻ║

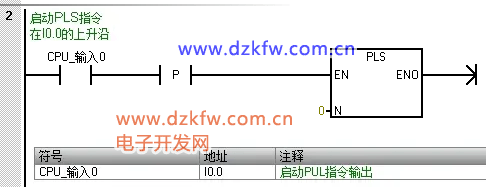
PLSųĖ┴Ņ│§╩╝╠Ē╝ėĄĮ│╠ą“ēKųąĄ─ĀŅæB╚ńŽ┬łD╦∙╩ŠŻ║

įōųĖ┴Ņ╣▓ėąā╔éĆ▌ö╚ļģóöĄŻ║EN║═NŻ¼ŲõųąŻ║
- ENŻ║▓╝Ā¢ą═ūā┴┐Ż¼PTO├}ø_▌ö│÷╩╣─▄Ż¼╩╣ė├čžą┼╠¢ė|░lŻ╗
- NŻ║ūųą═│Ż┴┐Ż¼▒Ē╩Š▌ö│÷PTOą┼╠¢Ą─═©Ą└ŠÄ╠¢Ż¼░³└©╚²ĘNŻ║0Īó1╗“2ĪŻŲõųąŻ║0=Q0.0Ż¼1=Q0.1Ż¼2=Q0.3Ż╗
ąĶę¬ūóęŌĄ─╩ŪŻ¼ų╗ėąś╦£╩ą═CPU─ŻēK▓┼ų¦│ųĖ▀╦┘├}ø_ą┼╠¢▌ö│÷ĪŻŲõųąŻ¼CPU ST20ų¦│ųā╔┬Ę├}ø_▌ö│÷ą┼╠¢Ż¼Ęųäe╩ŪQ0.0║═Q0.1Ż╗CPU ST30/ST40/ST60ų¦│ų╚²┬Ę├}ø_ą┼╠¢Ż¼Ęųäe╩ŪQ0.0ĪóQ0.1║═Q0.3Ż╗
šf├„Ż║
- «ö╩╣ė├PLSųĖ┴Ņ╝ż╗ŅPTO├}ø_░l╔·Ų„║¾Ż¼ŽÓæ¬Ą─▌ö│÷═©Ą└Ż©▒╚╚ńQ0.0Ż®▒╗├}ø_░l╔·Ų„Įė╣▄Ż¼▓╗╩▄│╠ą“ųąŲõ╦³öĄūų┴┐▌ö│÷ųĖ┴ŅĄ─┐žųŲŻ╗«ö├}ø_░l╔·Ų„╚ĪŽ¹╝ż╗Ņ║¾Ż¼▌ö│÷═©Ą└╩▄Ųš═©ųĖ┴Ņ▌ö│÷Ą─┐žųŲŻ╗
- ╚ń╣¹│╠ą“ųąęčĮøĮMæB┴╦▀\äė┐žųŲŽ“ī¦Ż¼ätęįŽ“ī¦Ą─ĮMæB×ķ£╩Ż╗
- ▓╗Į©ūh╩╣ė├└^ļŖŲ„▌ö│÷ą═CPUŻ©SR20/SR30/SR40/SR60Ż®▌ö│÷PTO├}ø_ą┼╠¢Ż╗
ė╔ė┌PLSųĖ┴Ņ▒Š╔ĒāH┐╔ęįįOų├▌ö│÷═©Ą└Ą─ŠÄ╠¢Ż¼ę“┤╦Ųõ╦³ģóöĄŻ©▒╚╚ńŅl┬╩Īó├}ø_öĄĄ╚Ż®▒žĒÜ═©▀^╠ž╩Ō┤µā”Ų„ūų╣Ø/ūųüĒįOų├ĪŻ▀@ą®╠ž╩Ō┤µā”Ų„ūų╣Ø/ūų╩ŪPTO╗“PWM├}ø_ą┼╠¢╣▓ė├Ą─Ż¼ė╔ė┌▒Ššn│╠ĮķĮBĄ─PTO├}ø_Ż¼╦∙ęįŽ┬├µ╬ęéāė├PTO├}ø_üĒ├Ķ╩÷ĪŻĻPė┌PWM├}ø_Ą─╠ž╩Ō┤µā”Ų„ūų╣Ø/ūų┐╔ęį┐┤īŻÖ┌ĪČS7-200 SMARTĄ─PWM╣”─▄æ¬ė├ĪĘĪŻ
┼cPTOŽÓĻPĄ─╠ž╩Ō┤µā”Ų„ūų╣Ø┐╔ęįĘų×ķā╔ŅÉŻ║ę╗ŅÉ╩Ūė├ė┌┐žųŲPTOą┼╠¢Ą─Ż¼ĘQ×ķ┐žųŲūų╣ØŻ╗┴Ēę╗ŅÉ╩Ūė├üĒ▒Ē╩ŠPTOĀŅæBĄ─Ż¼ĘQ×ķĀŅæBūų╣ØŻ╗
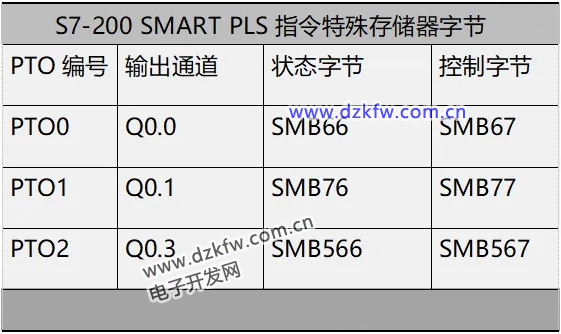
ĀŅæBūų╣Ø░³└©╚²éĆŻ║SMB66ĪóSMB76║═SMB566ĪŻŲõųąŻ¼SMB66╩ŪPTO0Ż©Q0.0Ż®Ą─ĀŅæBūų╣ØŻ╗SMB76╩ŪPTO1Ż©Q0.1Ż®Ą─ĀŅæBūų╣ØŻ╗SMB566╩ŪPTO2Ż©Q0.3Ż®Ą─ĀŅæBūų╣ØŻ╗
┐žųŲūų╣Ø░³└©╚²éĆŻ║SMB67ĪóSMB77║═SMB567ĪŻŲõųąŻ¼SMB67╩ŪPTO0Ż©Q0.0Ż®Ą─┐žųŲūų╣ØŻ╗SMB77╩ŪPTO1Ż©Q0.1Ż®Ą─┐žųŲūų╣ØŻ╗SMB567╩ŪPTO2Ż©Q0.3Ż®Ą─┐žųŲūų╣ØŻ╗╚ńŽ┬łD╦∙╩ŠŻ║
┐žųŲūų╣Ø┐é╣▓ėą8éĆ╬╗Ż¼├┐éĆ╬╗Ą─║¼┴x╚ńŽ┬Ż║
- Ą┌0╬╗Ż║PTO/PWM╩ŪʱĖ³ą┬Ņl┬╩/ų▄Ų┌ĢrķgĪŻ0=▓╗Ė³ą┬Ż╗1=Ė³ą┬Ż╗
- Ą┌1╬╗Ż║PWMĖ³ą┬├}ø_īÆČ╚ĢrķgĪŻ0=▓╗Ė³ą┬Ż╗1=Ė³ą┬Ż╗
- Ą┌2╬╗Ż║PTOĖ³ą┬├}ø_ėŗöĄųĄĪŻ0=▓╗Ė³ą┬Ż╗1=Ė³ą┬Ż╗
- Ą┌3╬╗Ż║PWMĢrķg╗∙£╩ĪŻ0=usŻ©╬ó├ļŻ®Ż╗1=msŻ©║┴├ļŻ®Ż╗
- Ą┌4╬╗Ż║▒Ż┴¶Ż╗
- Ą┌5╬╗Ż║PTOįOų├å╬Č╬╗“ČÓČ╬▓┘ū„ĪŻ0=å╬Č╬;1=ČÓČ╬Ż╗
- Ą┌6╬╗Ż║PTO/PWM─Ż╩Į▀xō±ĪŻ0=PWMŻ╗1=PTOŻ╗
- Ą┌7╬╗Ż║PTO/PWM╩╣─▄ĪŻ0=Į¹ė├Ż╗1=åóė├Ż╗
ęįPTO0×ķ└²Ż¼╚ń╣¹īóŲõįOų├×ķå╬Č╬PTO▌ö│÷Ż¼Ņl┬╩┼c├}ø_öĄČ╝▓╗Ė³ą┬Ą─ŪķørŽ┬Ż¼ätąĶę¬īóSMB67┘xųĄ×ķŻ║16#C0Ż╗╚ń╣¹ę¬īóŲõįOų├×ķå╬Č╬PTO▌ö│÷Ż¼Ņl┬╩▓╗Ė³ą┬Ż¼├}ø_öĄĖ³ą┬Ż¼ätąĶę¬īóSMB67┘xųĄ×ķŻ║16#C4Ż╗
Ž┬├µ▀@Åł▒Ē┴ą│÷┴╦┐žųŲūų╣ØĄ─ųĄŻ©16▀MųŲŻ®┼cPTOĄ─Ņl┬╩Īó├}ø_öĄĪóå╬Č╬/ČÓČ╬Ą─ī”æ¬ĻPŽĄŻ║

PTO▌ö│÷Ą─Ņl┬╩å╬╬╗╩ŪHzĪŻ
│²┴╦įOų├┐žųŲūų╣ØŻ¼╬ęéā▀ĆąĶę¬įOų├PTOęįČÓ┤¾Ą─Ņl┬╩▀Mąą▌ö│÷Ż┐ę¬▌ö│÷ČÓ╔┘éĆ├}ø_Ż┐╝░ČÓČ╬├}ø_Ž┬Ū·ŠĆĄ─Ų╩╝ĄžųĘŻ╗▀@ą®įOų├šł┐┤Ž┬├µĄ─▒ĒĖ±Ż║

PTO▌ö│÷Ą─Ņl┬╩Ą─ĘČć·╩ŪŻ║1Hz Ī▄ PTOŅl┬╩ Ī▄ 100,000Hz Ż╗╚ń╣¹įOų├Ą─Ņl┬╩ąĪė┌1HzŻ¼ätĢ■─¼šJ╩╣ė├1HzŻ╗╚ń╣¹įOų├Ą─Ņl┬╩┤¾ė┌100,000HzŻ¼ätĢ■─¼šJ╩╣ė├100,000HzŻ╗
PTO▌ö│÷Ą─├}ø_öĄĄ─ĘČć·╩ŪŻ║1 Ī▄ PTO├}ø_öĄ Ī▄ 2,147,483,647Ż╗╚ń╣¹įOų├Ą─├}ø_öĄąĪė┌1Ż¼ätĢ■─¼šJ╩╣ė├1Ż╗╚ń╣¹įOų├Ą─├}ø_öĄ┤¾ė┌2,147,483,647Ż¼ätĢ■─¼šJ╩╣ė├2,147,483,647Ż╗
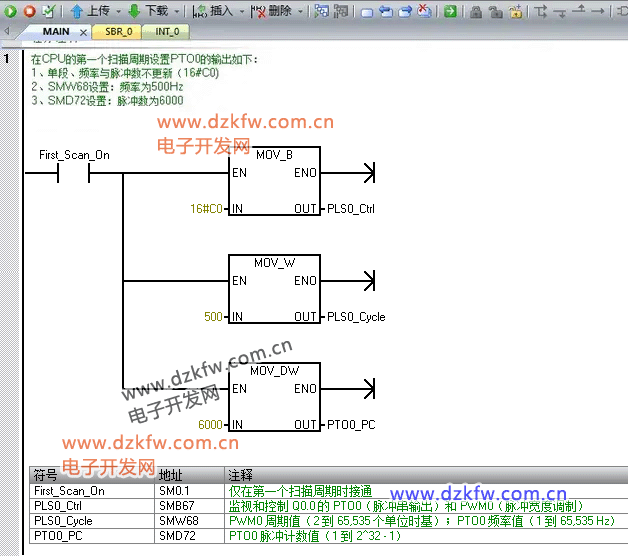
┼eéĆ└²ūėŻ║╚ń╣¹ę¬įOų├PTO0Ą─å╬Č╬▌ö│÷Ņl┬╩×ķ500HzŻ¼▌ö│÷6000éĆ├}ø_öĄŻ¼ätįOų├Ż║SMW68=500Ż¼SMD72=6000Ż╗
│╠ą“┤·┤a╚ńŽ┬łD╦∙╩ŠŻ║
į┌įOų├PTO▌ö│÷║¾Ż¼▀Ć┐╔ęį═©▀^ĀŅæBūų╣Ø▓ķ┐┤PTOĄ─ĀŅæBŻ╗
├┐éĆPTOĀŅæBūų╣Ø░³└©8éĆ╬╗Ż¼Ųõųą
- Ą┌0~3╬╗Ż║▒Ż┴¶Ż╗
- Ą┌4╬╗Ż║PTOį÷┴┐ėŗ╦ŃÕeš`Ż╗0=¤oÕeš`Ż╗1=ėąÕeš`Č°╚ĪŽ¹Ż╗
- Ą┌5╬╗Ż║PTOŪ·ŠĆĮ¹ė├Ż╗0=ĘŪ╩ųäėĮ¹ė├Ż╗1=ė├æ¶╩ųäėĮ¹ė├Ż╗
- Ą┌6╬╗Ż║PTO/PWM╣▄ŠĆ╔Žęń/Ž┬ęńŻ╗0=¤o╔Žęń/Ž┬ęńŻ╗1=╔Žęń/Ž┬ęńŻ╗
- Ą┌7╬╗Ż║PTO╩Ūʱ┐šķeŻ╗0=░l╦═ųąŻ╗1=┐šķeŻ╗
ĀŅæBūų╣ØĄ─Ąõą═æ¬ė├┐╔ęį▓ķ┐┤PTO╩Ūʱš²į┌░l╦═├}ø_ĪŻ
▒╚╚ńŻ¼ę¬Öz▓ķPTO0╩Ūʱš²į┌░l╦═├}ø_Ż¼┐╔ęį┼ąöÓSMB66.7╩Ūʱ×ķ0Ż╗
PTO1║═PTO2Ą─ĀŅæBūų╣ØĘųäe╩ŪSMB76║═SMB566Ż¼▀@éĆį┌Ū░├µĄ─▒ĒĖ±šf▀^┴╦ĪŻ
ęį╔ŽŠ═╩ŪĻPė┌S7-200 SMARTĄ─PLSųĖ┴Ņ╝░Ųõ╠ž╩Ō┤µā”Ų„ūų╣Ø/ūų/ļpūųĄ─įOų├Ż¼Š═Ž╚ĮķĮBĄĮ▀@└’ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū