
į┌ūįäė╗»║═┐žųŲŽĄĮyųąŻ¼▀\äė┐žųŲŲ„║═┐╔ŠÄ│╠▀ē▌ŗ┐žųŲŲ„(PLC)░ńč▌ų°ų┴ĻPųžę¬Ą─ĮŪ╔½ĪŻ▒M╣▄╦³éāĮø│Ż▒╗ė├ė┌īŹ¼F╣żśIÖCąĄĄ─ūįäė╗»┐žųŲŻ¼Ą½╦³éāĄ─įOėŗ─┐ś╦Īó╣”─▄║═æ¬ė├ĘČć·┤µį┌’@ų°▓Ņ«ÉĪŻį┌╣żśIūįäė╗»ŅIė“«öųąŻ¼▀\äė┐žųŲę╗ų▒╩ŪPLCæ¬ė├ŅIė“«öųąĄ─ųžę¬ĮM│╔▓┐ĘųĪŻ▀\äė┐žųŲŲ„īŻķTįOėŗė├ė┌Š½├▄Ąž┐žųŲÖCąĄ▀\äėĄ─▄ē█EĪó╦┘Č╚Īó╝ė╦┘Č╚║═╬╗ų├ĪŻ▀@ą®įOéõ═©│Żė├ė┌ę¬Ū¾Ė▀Š½Č╚║═Å═ļs▀\äė┐žųŲĄ─ł÷║ŽŻ¼╚ńÖCŲ„╚╦▒█ĪóCNCÖC┤▓Īó░ļī¦¾wųŲįņįOéõ║═Ųõ╦¹ūįäė╗»čb┼õŠĆĪŻ▀\äė┐žųŲŲ„ÅŖš{Ė▀╦┘ĪóŠ½┤_Ą─³cī”³cęŲäėŻ¼ęį╝░ČÓ▌Sģfš{▀\äėĄ──▄┴”ĪŻČ°▓Į▀MļŖÖCė╔ė┌Ųõąį─▄ĘĆČ©ĪóĒææ¬╦┘Č╚┐ņĪó▀\ąąŲĮĘĆĪóįļ궥═Ą╚╠ž³cŻ¼▒╗ÅVĘ║æ¬ė├į┌ėąŠ½Č╚ę¬Ū¾Ą─Č©╬╗┐žųŲł÷║ŽĪŻī”ė┌Į^┤¾ČÓöĄ▓Į▀M┐žųŲŽĄĮyŻ¼Č╝╩╣ė├Ą─╩Ūķ_Łh┐žųŲŻ¼ę“×ķ┐žųŲ║åå╬ĪŻ
ėąą®ŪķørŽ┬Ż¼į÷╝ėŠÄ┤aŲ„Ą─ĘĮ╩ĮŻ¼ĮM│╔▓Į▀Mķ]Łh┐žųŲŽĄĮyŻ¼╝╚─▄ĮĄĄ═įOéõ¾wĘeŻ¼▀Ć┐╔ęį£p╔┘▓Į▀MļŖÖCüG▓ĮĄ─’LļUŻ¼ŽÓ▒╚╦┼Ę■ŽĄĮy│╔▒ŠĖ³Ą═ĪŻ▒Š╬─ęį╬„ķTūėPLC×ķ┐žųŲŲ„Ż¼ĮY║ŽŠÄ┤aŲ„║═▓Į▀MļŖÖCĮM│╔ķ]ŁhŽĄĮyŻ¼ęį╣®ģó┐╝ĪŻ

1.ŽĄĮyė▓╝■ĮM│╔
ę“×ķąĶę¬ĮM│╔▓Į▀Mķ]ŁhŽĄĮyŻ¼╦∙ęįį┌▀x╚ĪPLCĄ─Ģr║“Ż¼ąĶę¬ØMūŃā╔éĆŚl╝■Ż¼ų¦│ų├}ø_▌ö│÷Ż¼ų¦│ųĖ▀╦┘ėŗöĄŲ„▌ö╚ļĪŻį┌▀@└’╩╣ė├S7-200 SMART ST20Ż¼╦³Š▀ėą2éĆ100KHzĄ─├}ø_▌ö│÷Ż¼6éĆĖ▀╦┘ėŗöĄŲ„Ż¼ØMūŃ▓Į▀Mķ]Łh┐žųŲĄ─ąį─▄ę¬Ū¾ĪŻ
▓Į▀MļŖÖC╩╣ė├čą┐ž▓Į▀MļŖÖCYK57HB76-04AŻ¼įōļŖÖC▓ĮŠÓĮŪ×ķ1.8ĪŃŻ¼▒Ż│ų▐DŠž×ķ2.0 N.mĪŻ“īäėŲ„╩╣ė├┼õ╠ūĄ─ą═╠¢YKE2405MŻ¼ļŖ┴„į┌1.5-4.0A┐╔š{Ż¼╝ÜĘų┐╔į┌400-40000ų«ķgįOų├ĪŻį┌▒ŠĒŚ─┐ųąŻ¼╝ÜĘųįOų├×ķ1000Ż¼╝┤PLC░l╦═1000éĆ├}ø_Ż¼ļŖÖCą²▐Dę╗╚”ĪŻ

ė╔ė┌ķ]ŁhĄ─ąĶ꬯¼ąĶę¬╩╣ė├ę╗┐ŅŠÄ┤aŲ„Ż¼▀@└’▀x╚ĪÜW─Ę²łĄ─į÷┴┐ŠÄ┤aŲ„E6B2-CWZ6C 1000P/R 3MŻ¼ŲõĘų▒µ┬╩×ķ1000├}ø_/╚”Ż¼īóŲõų▒Įė░▓čbį┌▓Į▀MļŖÖCĄ─▌ö│÷▌S╔ŽĪŻ
ŠC╔Ž╦∙╩÷Ż¼─Ū├┤╬ęéā┐╔ęįĄ├ĄĮįō▓Į▀M┐žųŲŽĄĮyĄ─ĻPŽĄŻ║PLC░l╦═ę╗Ū¦éĆ├}ø_Ż¼▓Į▀MļŖÖCą²▐Dę╗╚”Ż¼ŠÄ┤aŲ„ę▓ą²▐Dę╗╚”ĪŻ
×ķ┴╦Ė³║├Ą─░l╦═├}ø_Ą─▌ö╚ļųĖ┴ŅŻ¼═©│Ż╩╣ė├ė|├■Ų┴ĪŻė|├■Ų┴▌ö╚ļ├}ø_ųĖ┴ŅŻ¼ĮoĄĮPLCŻ¼PLCį┘░l╦═Įo▓Į▀M“īäėŲ„Ż¼▓Į▀M“īäėŲ„“īäėļŖÖCĪŻ═Ļ│╔ę╗ŽĄ┴ąĄ─┐žųŲĪŻį┌īŹļHæ¬ė├Ą─Ģr║“Ż¼×ķ┴╦▓┘ū„åTĄ─ęūūxČ«ĪóĘĮ▒ŃČ╚┴┐Ż¼═©│Żīó▌ö╚ļĄ─å╬╬╗▐D╗»×ķ║┴├ūĪŻ▒Š░Ė╩╣ė├Ą─╩ŪĮzŚUĮYśŗŻ¼ī¦│╠×ķ10mmŻ¼╝┤░l╦═1000├}ø_Ż¼ļŖÖCęŲäė10mmĪŻ▒ŠÖCęį═■Š]═©Ą─ė|├■Ų┴MT8051IPū„×ķģóöĄ▌ö╚ļĮń├µŻ¼«ö▌ö╚ļķLČ╚×ķPĢrŻ¼ųĖ┴Ņ├}ø_Ą─öĄ┴┐×ķQ = 100PŻ¼▓Į▀MļŖÖC▀\▐DĢrŠÄ┤aŲ„Ą─Ę┤ü├}ø_×ķFŻ¼F=QĪŻ┐éĄ─ŽĄĮyė▓╝■ĘĮ┐“łD╚ńłD1╩ŠŻ║
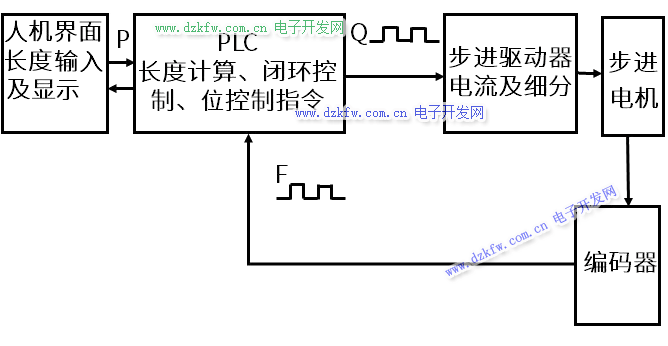
łD1 ŽĄĮyė▓╝■ĘĮ┐“łDŲ¼├Ķ╩÷
2.ŽĄĮyų„ę¬┐žųŲ╣”─▄
ŽĄĮy┐žųŲ▄ø╝■╣”─▄░³└©ķLČ╚┼cųĖ┴Ņ├}ø_ōQ╦ŃŻ¼╬╗ų├┐žųŲģóöĄįOČ©╝░Č©╬╗┐žųŲŻ¼├}ø_Ę┤ü╝░ķ]Łh┐žųŲŻ¼│¼▓Ņ╠Ä└ĒĄ╚
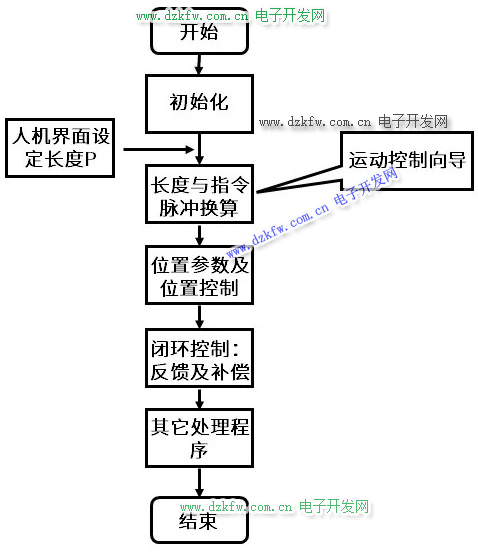
łD2 ŽĄĮy▄ø╝■┐“łD
-
Ż©ę╗Ż®▀\äė┐žųŲŽ“ī¦
×ķ┴╦īóķLČ╚å╬╬╗┼c├}ø_ųĖ┴Ņ▀MąąōQ╦ŃŻ¼S7-200 SMART ╠ß╣®┴╦ę╗éĆ▀\äėŽ“ī¦Ą─╣żŠ▀Ż¼▀@éĆ╣żŠ▀┐╔ęį┐ņ╦┘Ą─īó╣ż│╠å╬╬╗▐D╗»│╔▓Į▀M“īäėŲ„ŽÓī”æ¬Ą─┐žųŲ├}ø_ĪŻ▒Š░Ėųą▓Į▀MĄ─├}ø_╝ÜĘų×ķ1000Ż¼ī¦│╠×ķ10mmŻ¼╦∙ęįį┌▀Mąą▀\äė┐žųŲŽ“ī¦Ą─Ģr║“Ż¼įOų├ĘĮĘ©╚ńłD3╦∙╩ŠŻ║
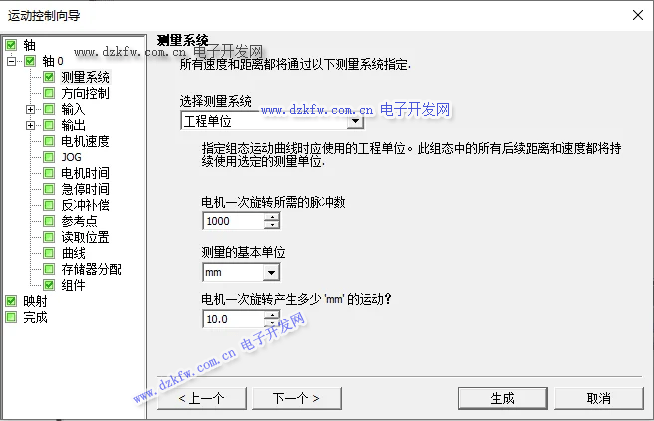
łD3 ▓Į▀M£y┴┐ŽĄĮy
-
Ż©Č■Ż®╬╗ų├ųĖ┴ŅģóöĄįOČ©
«ö╩╣ė├▀\äė┐žųŲŽ“ī¦įOų├═Ļ«ģų«║¾Ż¼Ģ■ūįÅ─╔·│╔ī”æ¬Ą─╣”─▄ēKŻ¼į┌▀MąąČ©╬╗┐žųŲĄ─Ģr║“Ż¼š{ė├ŽÓī”æ¬Ą─╣”─▄ēK╝┤┐╔ĪŻąĶę¬ūóęŌĄ─╩ŪŻ¼╩╣ė├Į^ī”Č©╬╗▀\äėŻ¼ąĶꬎ╚▀Mąą╗ž┴ŃĄ─įOų├ĪŻį┌▀MąąĮ^ī”Č©╬╗Ż¼╩╣ė├Ą─╣”─▄ēK╩ŪAXIS0_GOTOŻ¼į┌▀Mąą╬╗ų├┐žųŲĄ─Ģr║“Ż¼įOų├║├╬╗ų├öĄō■Ż¼ė|░lV2100.7ät┐╔ęį▀MąąČ©╬╗┐žųŲĪŻ
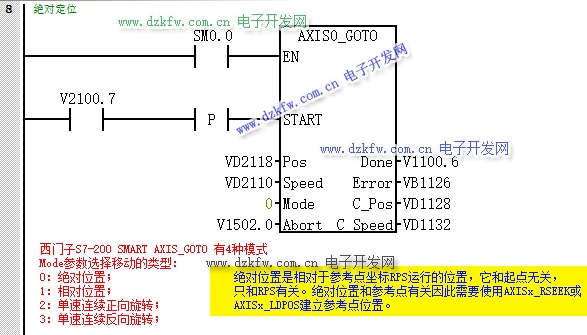
łD4 AXIS0_GOTO╣”─▄ēK
-
Ż©╚²Ż®ŠÄ┤aŲ„ķ]ŁhĘ┤üŽĄĮy
ī”ė┌ŠÄ┤aŲ„Ą─ķ]ŁhĘ┤üŻ¼┐╔ęį╩╣ė├S7-200 SMARTĄ─Ė▀╦┘ėŗöĄŲ„Ž“ī¦Ż¼üĒ═Ļ│╔ŽÓĻPģóöĄĄ─įOų├Ż¼į┌▀MąąŽÓĻPģóöĄįOų├Ą─Ģr║“Ż¼ąĶę¬┤_Č©║├ī”æ¬Ą─Ė▀╦┘ėŗöĄŲ„Ą──Ż╩ĮĪŻ═©│Żėą╦─ĘNŅÉą═Ą─Ė▀╦┘ėŗöĄŲ„Ż¼ā╚▓┐ĘĮŽ“Ė▀╦┘ėŗöĄŲ„Īó═Ō▓┐ĘĮŽ“Ė▀╦┘ėŗöĄŲ„Īó╝ė£pļpŽÓĖ▀╦┘ėŗöĄŲ„ĪóABš²Į╗Ė▀╦┘ėŗöĄŲ„Ż¼▀@╦─ĘNŅÉą═Ė∙ō■╩ŪʱėąÅ═╬╗╣”─▄ėųėą╦∙▓╗═¼ĪŻ▒Š░Ė╩╣ė├─Ż╩Į1Ż¼Ä¦ėąā╚▓┐ĘĮŽ“┐žųŲĄ─å╬ŽÓį÷/£pėŗöĄŲ„ĪŻ╩╣ė├Å═╬╗▌ö╚ļĪŻ
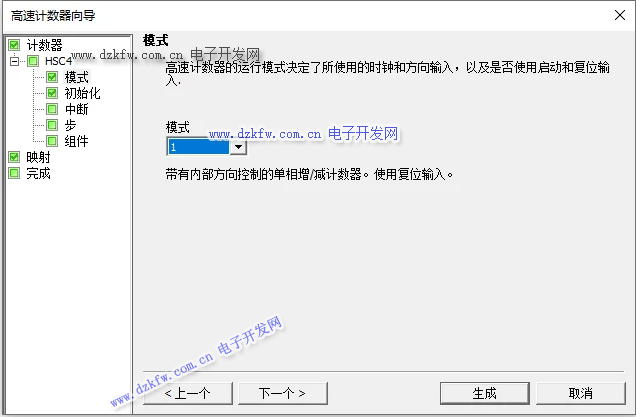
łD5 Ė▀╦┘ėŗöĄŲ„Ž“ī¦
«ö▀Mąą▀\äė┐žųŲĄ─Ģr║“Ż¼╩╣ė├Ė▀╦┘ėŗöĄŲ„Ą─ĘĄ╗žųĄ┼cAXIS0_GOTOĄ─«öŪ░╬╗ų├ųĄ▀Mąą▒╚▌^Ż¼«öā╔š▀ŽÓĄ╚Ģr║“Ż¼ūC├„ø]ėąüG▓ĮŻ¼«öĘ┤üųĄąĪė┌AXIS0_GOTOĄ─╬╗ų├ųĄŻ¼ät┐╔─▄░l╔·üG▓ĮĄ─ŪķørŻ¼ąĶę¬▀MąąčaāöŻ¼═©│ŻĢ■įOų├ę╗Č©Ą─╚▌▓ŅĘČć·Ż¼«ö┤¾ė┌╚▌▓ķĄ─ĢrŻ¼ät▓╗į┘▀MąąčaāöŻ¼ąĶę¬▀Mąął¾Š»╠Ä└ĒŻ¼Öz▓ķ│¼│÷╚▌▓ŅĄ─įŁę“ĪŻ
3.┐éĮY
▓Į▀MĄ─ķ]Łh┐žųŲŽĄĮyŻ¼ī”ė┌─│ą®Č©╬╗ę¬Ū¾▒╚▌^Ė▀Ą─ł÷║ŽŠ▀ėąųžę¬Ą─ū„ė├ĪŻ│²┴╦╩╣ė├ŠÄ┤aŲ„Ę┤üĮM│╔ķ]Łh┐žųŲų«═ŌŻ¼▀Ćėą┐╔ęį╩╣ė├─ŻöM┴┐Ą╚ĘĮ╩ĮüĒśŗĮ©▓Į▀Mķ]Łh┐žųŲŽĄĮyĪŻŠ▀¾wĄ─īŹ¼FĘĮ╩ĮŻ¼┐╔ęįĖ∙ō■╣ż╦ć║═ę¬Ū¾üĒ▀Mąą▀xō±Ż¼┤╦╠Äų╗╩Ū╠ß╣®┴╦ę╗ĘNæ¬ė├ĘĮ░ĖŻ¼╣®ģó┐╝ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū