
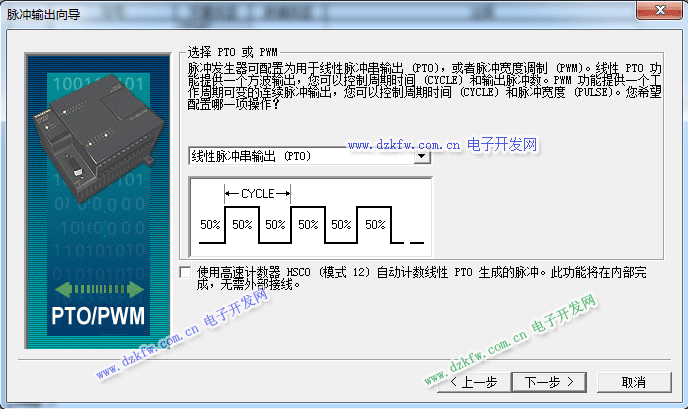
«öįOéõī”╬╗ų├ėąŠ½┤_ę¬Ū¾Ģr▀xė├PTOŻ¼Č°«öįOéõī”▐D╦┘║═┴”ŠžėąŠ½┤_ę¬Ū¾Ģr▀xė├PWMĪŻ
Ė∙ō■įOéõĄ─ąĶę¬▀xō±╦┼Ę■“īäėĄ─ŅÉą═Ż¼į┘▀xō±ė├──ĘN┐žųŲĘĮ╩ĮĪŻ
PWM╩Ū═©▀^Ė▀╦┘ėŗöĄŲ„īó▌ö╚ļą┼╠¢─ŻöM×ķ║ŃČ©Ą─ļŖē║▌ö│÷Ż¼═©▀^┐žųŲļŖē║Ą─ūā╗»üĒ┐žųŲļŖÖC▐D╦┘Ą─ūā╗»ĪŻ
─┐Ū░╩ął÷ųąė├Ą─▒╚▌^ČÓĄ─╩ŪĦPTO╣”─▄Ą─╦┼Ę■Ż¼╬ęéāĮą╦³├}ø_ą═ĪŻ
┴Ē═Ōę╗ĘN╩Ūā╔ĘN╣”─▄Č╝Š▀éõĄ─Ż¼╬ęéāĮą╦³╚½╣”─▄ą═ĪŻ▒╚├}ø_ą═┘F▓╗╔┘ĪŻ
╝╚╚╗╩Ū╚½╣”─▄ą═Ż¼─ŃėųŽļę¬╦┼Ę■Š½┤_╬╗ęŲĄ─įÆŻ¼ė├PTO┐žųŲŠ═║├┴╦ĪŻ
Ž┬├µ╬ęÅ─ŠW╔Žšę┴╦ā╔éĆīŹ└²Ż¼Ž╚┤µų°Ż¼ęį║¾ą┬╔ĒūCīŹę╗Ž┬ĪŻ
╬„ķTūėS7-200ŽĄ┴ąPLCĄ─PMWĘĮ▓©┐žųŲ│╠ą“┼e
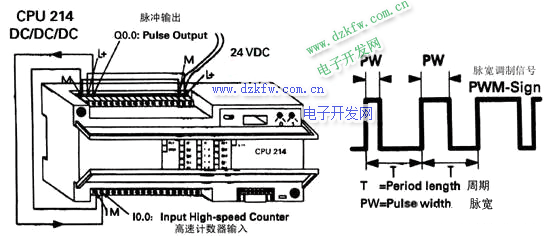
į┌╬„ķTūėS7-200ŽĄ┴ąPLCųąŻ¼CPU-214Ą─▌ö│÷Č╦Q0.0║═Q0.1─▄ē“▌ö│÷ĘĮ▓©ą┼╠¢Ż¼Č°ŪęĘĮ▓©ą┼╠¢Ą─ų▄Ų┌║═├}īÆŠ∙─▄¬Ü┴óš{╣ØŻ¼Ųõųą├}īÆųĖĄ─╩Ūį┌ę╗éĆų▄Ų┌ā╚Ż¼▌ö│÷ą┼╠¢╠Äė┌Ė▀ļŖŲĮĄ─ĢrķgķLČ╚ĪŻ
Ž┬├µ▀@éĆ└²ūėšf├„┴╦├}īÆš{ųŲ(PWM)╩Ū╚ń║╬╣żū„Ą─ĪŻ▌ö│÷Č╦Q0.0▌ö│÷ĘĮ▓©ą┼╠¢Ż¼Ųõ├}īÆ├┐ų▄Ų┌▀fį÷0.5├ļŻ¼ų▄Ų┌╣╠Č©×ķ5├ļŻ¼▓óŪę├}īÆĄ─│§╩╝ųĄ×ķ0.5├ļĪŻ«ö├}īÆ▀_ĄĮįOČ©Ą─ūŅ┤¾ųĄ4.5├ļŻ¼├}īÆĖ─×ķ├┐ų▄Ų┌▀f£p0.5├ļŻ¼ūįĄĮ├}īÆ×ķ┴Ń×ķų╣ĪŻęį╔Ž▀^│╠ų▄Č°Å═╩╝ĪŻ
į┌▀@éĆ└²ūėųą▒žĒÜ░č▌ö│÷Č╦Q0.0┼c▌ö╚ļČ╦10.0▀BĮėŻ¼▀@śė│╠ą“▓┼─▄┐žųŲPWMĪŻ
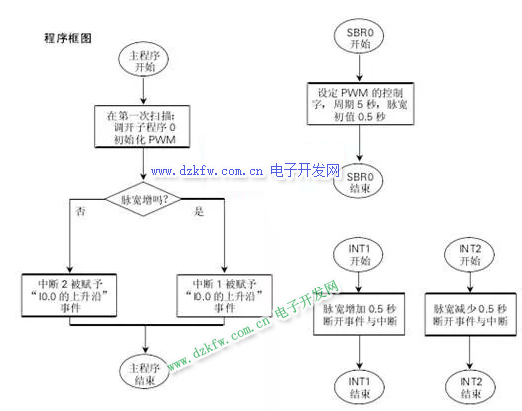

ūė│╠ą“Ż║
╠ž╩Ō┤µā”ūų╣ØSMB67ė├üĒ│§╩╝╗»▌ö│÷Č╦00.0Ą─PWMĪŻ▀@éĆ┐žųŲūųā╚║¼PWMį╩įS╬╗Ż¼ą▐Ė─ų▄Ų┌║═├}īÆĄ─į╩įS╬╗Ż¼ęį╝░Ģrå¢╗∙öĄ▀xō±╬╗Ą╚ĪŻūė│╠ą“0üĒš{š¹▀@éĆ┐žųŲūų╣ØĪŻ═©▀^EN}ųĖ┴ŅŻ¼╩╣╦∙ėąĄ─ųąöÓ│╔×ķ╚½Šųį╩įSŻ¼╚╗║¾═©▀^PLSOųĖ┴ŅŻ¼╩╣ŽĄĮyĮė╩▄Ė„įOČ©ųĄŻ¼▓ó│§╩╝╗»Ī░PT O/PWM░l╔·Ų„Ī▒Ż¼Å─Č°į┌▌ö│÷Č╦00.0▌ö│÷├}īÆš{ųŲ(PWM)ą┼╠¢ĪŻ
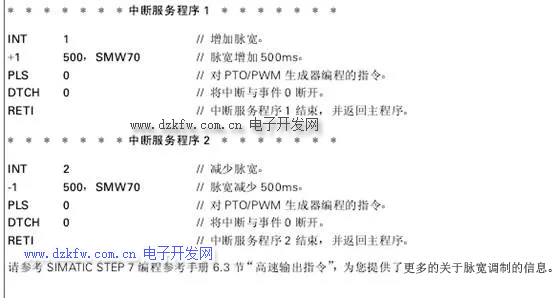
┴Ē═ŌŻ¼ų▄Ų┌5├ļ╩Ū═©▀^īóöĄųĄ500ų├╚ļ╠ž╩Ō┤µā”ūųSMW68üĒīŹ¼FĄ─Ż¼│§╩╝├}īÆ0.5├ļät═©▀^īó500īæ╚ļ╠ž╩Ō┤µā”ūųSMW70üĒīŹ¼FĄ─ĪŻ
ų„│╠ą“Ż║
▀@éĆ│§╩╝╗»▀^│╠╩Ūį┌│╠ą“Ą─Ą┌ę╗éĆÆ▀├Ķų▄Ų┌═©▀^ł╠ąąūė│╠ą“0üĒīŹ¼FŻ¼Ą┌ę╗éĆÆ▀├Ķų▄Ų┌ś╦ųŠ╩ŪSM0.1=1ĪŻ«öę╗éĆPWM裣hĮY╩°Ż¼╝┤«öŪ░├}īÆ×ķ0├ļĢrŻ¼īóį┘ę╗┤╬│§╩╝╗»PWMĪŻ
▌oų·ā╚┤µś╦ėøM 0.0ė├üĒ▒Ē├„├}īÆ╩Ūį÷╝ėŻ¼▀Ć╩Ū£p╔┘Ż¼│§╩╝╗»Ģrīó▀@éĆś╦ėøįO×ķį÷╝ėŻ©ų├1×ķ╝ėŻ¼ų├0×ķ£pŻ®ĪŻ▌ö│÷Č╦00.0┼c▌ö╚ļČ╦I0.0ŽÓ▀BŻ¼▀@śė▌ö│÷ą┼╠¢Š═┐╔╦═ĄĮ▌ö╚ļČ╦I0.0ĪŻ«öĄ┌ę╗éĆĘĮ▓©├}ø_▌ö│÷ĢrŻ¼└¹ė├ATC HųĖ┴ŅŻ¼░čųąöÓ│╠ą“1(INT1)┘xĮoųąöÓ╩┬╝■0 (I0.0Ą─╔Ž╔²čž)ĪŻ
├┐éĆų▄Ų┌ųąöÓ│╠ą“1īó«öŪ░├}īÆį÷╝ė0.5├ļŻ¼╚╗║¾└¹ė├DČĪC╚šųĖ┴ŅĘųļxųąöÓINT1Ż¼╩╣▀@éĆųąöÓį┘┤╬▒╗Ų┴▒╬ĪŻ╚ń╣¹į┌Ž┬┤╬į÷╝ėĢrŻ¼├}īÆ┤¾ė┌╗“Ą╚ė┌ų▄Ų┌Ż¼ätīó▌oų·ā╚┤µś╦ėø╬╗M 0.0į┘┤╬ų├0ĪŻ▀@śėŠ═░čųąöÓ│╠ą“2┘xūė╩┬╝■0Ż¼▓óŪę├}īÆę▓īó├┐┤╬▀f£p0.5├ļĪŻ«ö├}īÆųĄ£p×ķ┴ŃĢrŻ¼īóį┘┤╬ł╠ąąŻ¼│§╩╝╗»│╠ą“(ūė│╠ą“0)ĪŻ
╬„ķTūėS7-200ŽĄ┴ąPLCĄ─PTOĘĮ▓©┐žųŲ│╠ą“┼e└²
1Īó╩╣ė├╬╗┐žŽ“ī¦ŠÄ│╠Ą─▓Į¾E╚ńŽ┬Ż║
AĪó ×ķS7--200 PLC▀xō±▀xĒŚĮMæB ų├PTO/PWM▓┘ū„ĪŻ į┌STEP7V4.0▄ø╝■├³┴Ņ▓╦å╬ųą▀xō±╣żŠ▀Ī·╬╗ų├┐žųŲŽ“ī¦▓ó▀xō±┼õų├S7-200PLCā╚ ų├PTO/PWM▓┘ū„Ż¼╚ńłD╦∙╩ŠĪŻ
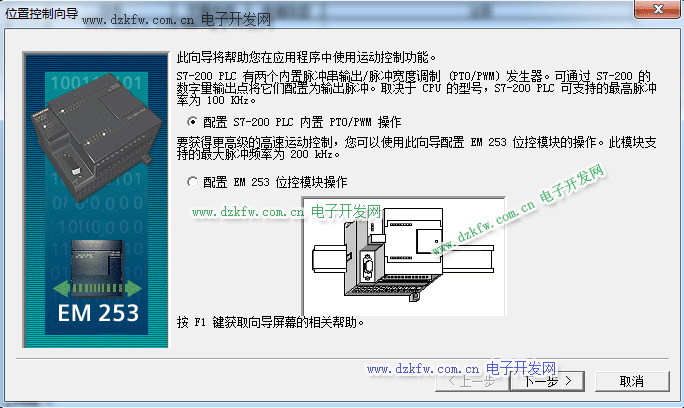
BĪóå╬ō¶Ī░Ž┬ę╗▓ĮĪ▒▀xō±Ī░Q0.0Ī▒Ż¼į┘å╬ō¶Ī░Ž┬ę╗▓ĮĪ▒▀xō±Ī░ŠĆąį├}ø_▌ö│÷Ż©PTOŻ®Ī▒ĪŻ
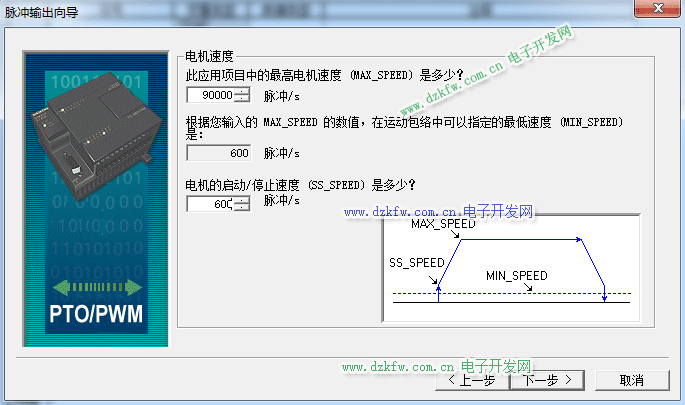
CĪóå╬ō¶Ī░Ž┬ę╗▓ĮĪ▒║¾Ż¼į┌ī”æ¬Ą─ŠÄ▌ŗ┐“ųą▌ö╚ļMAX_SPEED ║═SS_SPEED ╦┘Č╚ųĄĪŻ▌ö╚ļūŅĖ▀ļŖÖC╦┘Č╚Ī░90000Ī▒Ż¼░čļŖÖCåóäė/═Żų╣╦┘Č╚įOČ©×ķĪ░600Ī▒ĪŻ▀@ĢrŻ¼╚ń╣¹å╬ō¶MIN_SPEEDųĄī”æ¬Ą─╗ę╔½┐“Ż¼┐╔ęį░l¼FŻ¼MIN_SPEEDųĄĖ─×ķ600Ż¼ūóęŌŻ║MIN_SPEEDųĄė╔ėŗ╦ŃĄ├│÷ĪŻė├æ¶▓╗─▄į┌┤╦ė“ųą▌ö╚ļŲõ╦¹öĄųĄĪŻ
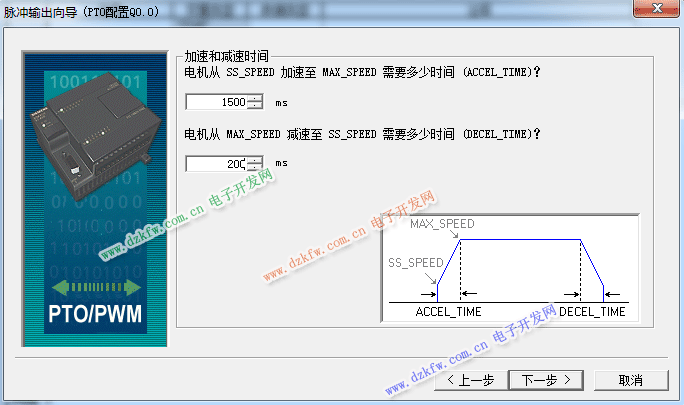
DĪóå╬ō¶Ī░Ž┬ę╗▓ĮĪ▒╠ŅīæļŖÖC╝ė╦┘ĢrķgĪ░1500Ī▒║═ļŖÖC£p╦┘Ģrķg Ī░200Ī▒ĪŻ
EĪóĮėŽ┬üĒę╗▓Į╩Ū┼õų├▀\äė░³ĮjĮń├µĪŻ
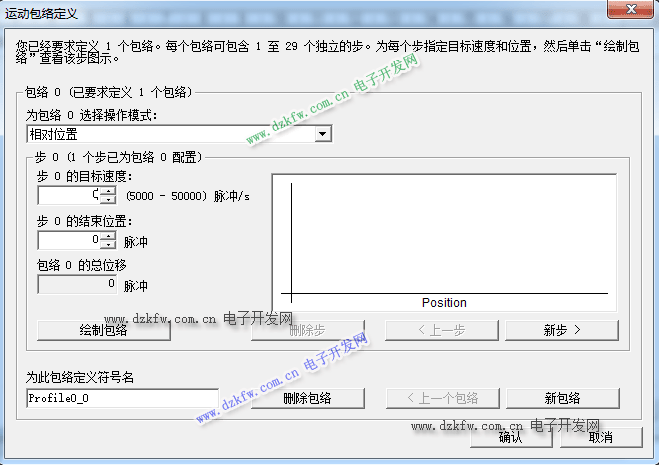
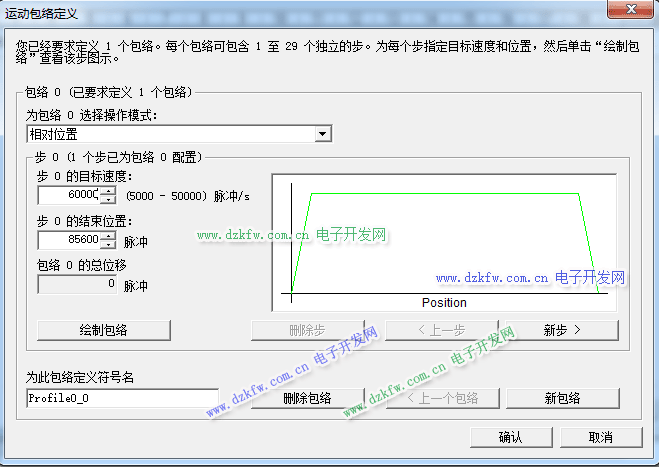
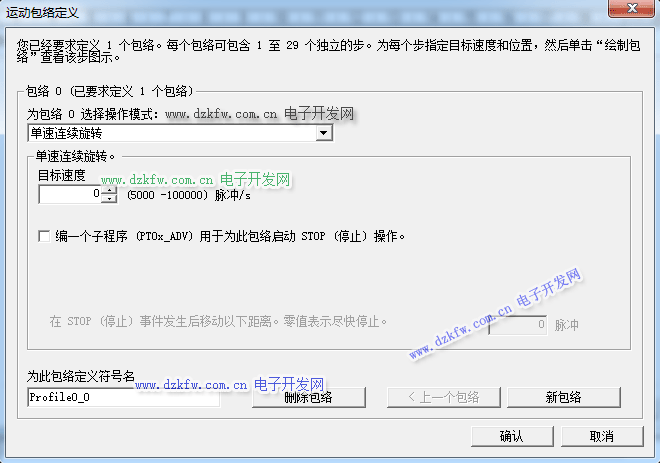
įōĮń├µę¬Ū¾įOČ©▓┘ū„─Ż╩ĮĪó1éĆ▓ĮĄ──┐ś╦╦┘Č╚ĪóĮY╩°╬╗ų├Ą╚▓ĮĄ─ųĖś╦Ż¼ęį╝░Č©┴x▀@ę╗░³ĮjĄ─Ę¹╠¢├¹ĪŻŻ©Å─Ą┌0éĆ░³ĮjĄ┌0▓Įķ_╩╝Ż®ĪŻį┌▓┘ū„─Ż╩Į▀xĒŚųą▀xō±ŽÓī”╬╗ų├┐žųŲŻ¼╠Ņīæ░³ĮjĪ░0Ī▒ųąöĄō■─┐ś╦╦┘Č╚Ī░60000Ī▒Ż¼ĮY╩°╬╗ų├Ī░85600Ī▒Ż¼³cō¶Ī░└LųŲ░³ĮjĪ▒Ż¼╚ńłD9╦∙╩ŠŻ¼ūóęŌŻ¼▀@éĆ░³Įjų╗ėą1▓ĮĪŻ░³ĮjĄ─Ę¹╠¢├¹░┤─¼šJČ©┴xĪŻ▀@śėŻ¼Ą┌0éĆ░³ĮjĄ─įOų├Ż¼╝┤Å─╣®┴ŽšŠĪ·╝ė╣żšŠĄ─▀\äė░³ĮjįOų├Š══Ļ│╔┴╦ĪŻ¼Fį┌┐╔ęįįOų├Ž┬ę╗éĆ░³ĮjĪŻ
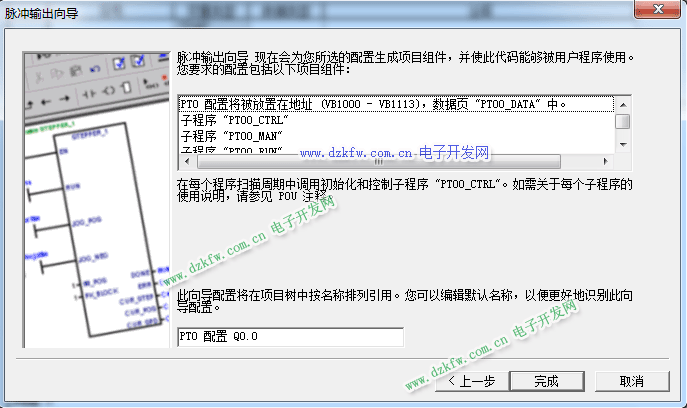
FĪó▀\äė░³ĮjŠÄīæ═Ļ│╔å╬ō¶Ī░┤_šJĪ▒Ż¼Ž“ī¦Ģ■ę¬Ū¾×ķ▀\äė░³ĮjųĖČ©V┤µā”ģ^ĄžųĘŻ©Į©ūhĄžųĘ×ķVB75Ī½VB300Ż®Ż¼─¼šJ▀@ę╗Į©ūhŻ¼å╬ō¶Ī░Ž┬ę╗▓ĮĪ▒│÷¼FŽ┬łDŻ¼å╬ō¶ Ī░═Ļ│╔Ī▒ĪŻ
2ĪóĒŚ─┐ĮM╝■
▀\äė░³ĮjĮMæB═Ļ│╔║¾Ż¼Ž“ī¦Ģ■×ķ╦∙▀xĄ─┼õų├╔·│╔╚²éĆĒŚ─┐ĮM╝■Ż©ūė│╠ą“Ż®Ż¼Ęųäe╩ŪŻ║PTOx_RUNūė│╠ą“Ż©▀\ąą░³ĮjŻ®Ż¼PTOx_CTRLūė│╠ą“Ż©┐žųŲŻ®║═PTOx_MANūė│╠ą“Ż©╩ųäė─Ż╩ĮŻ®ūė│╠ą“ĪŻę╗éĆė╔Ž“ī¦«a╔·Ą─ūė│╠ą“Š═┐╔ęįį┌│╠ą“ųąš{ė├┴╦Ż¼╚ńłD╦∙╩ŠĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū