
─┐õø
š²╬─Ż║
S7-200 SMART(ST30) Īó57▓Į▀MļŖÖCĪóļŖÖC“īäėŲ„Īó24VDCļŖį┤Īóī¦ŠĆ╚¶Ė╔
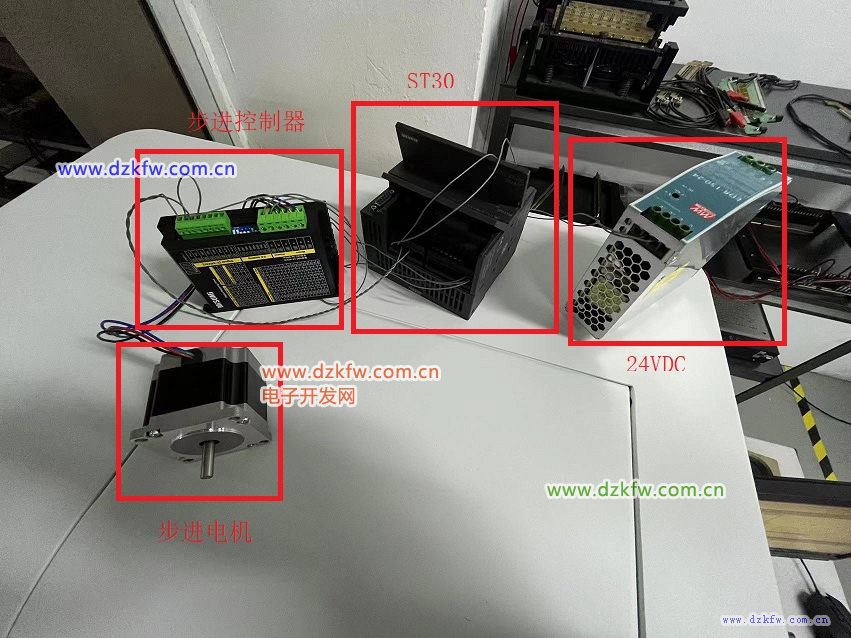
200smart┐žųŲ╦┼Ę■ļŖÖCŻ¼plc┐žųŲ▓Į▀MļŖÖC
ūóŻ║st20į╩įS┐žųŲ2▌S
st30į╩įS┐žųŲ3▌S
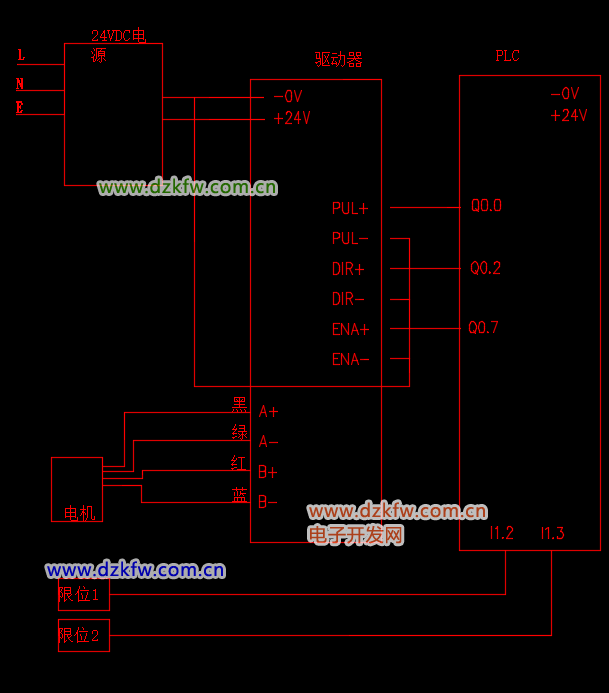
st30 Ė▀╦┘├}ø_▌ö│÷┐┌Q0.0 Q0.1 Q0.3
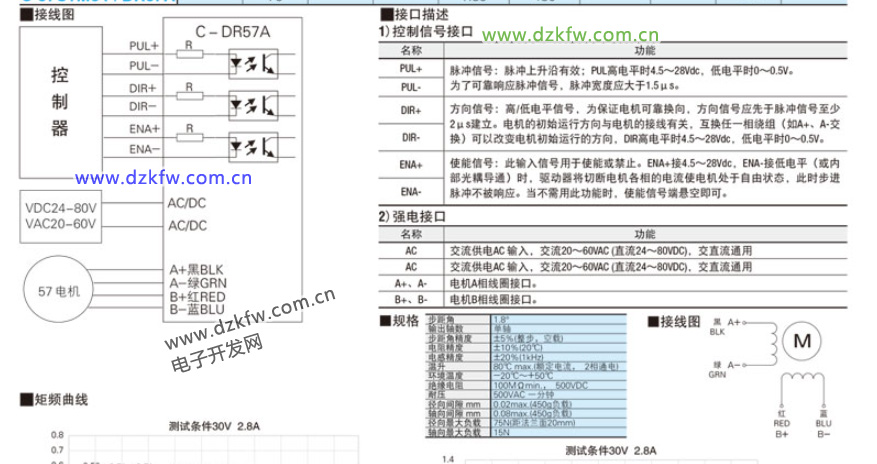
PULŻ║├}ø_▌ö╚ļČ╦
DIRŻ║▀\äėĘĮŽ“┐žųŲ
ENA:╩╣─▄▌ö╚ļŻ©į╩įSļŖÖC▀\▐DŻ®
200smart┐žųŲ▓Į▀MļŖÖCĮėŠĆłD
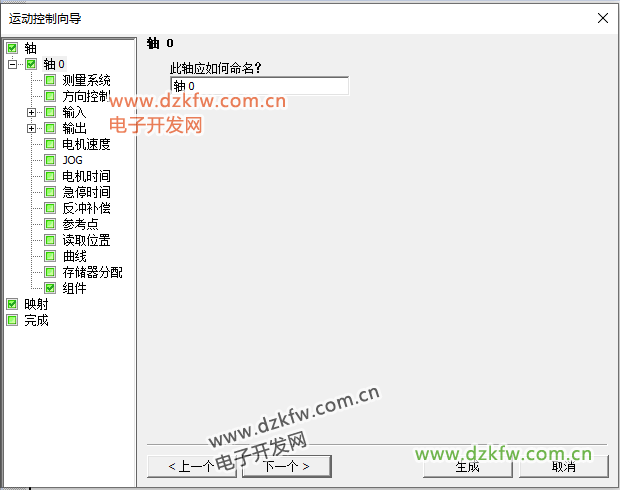
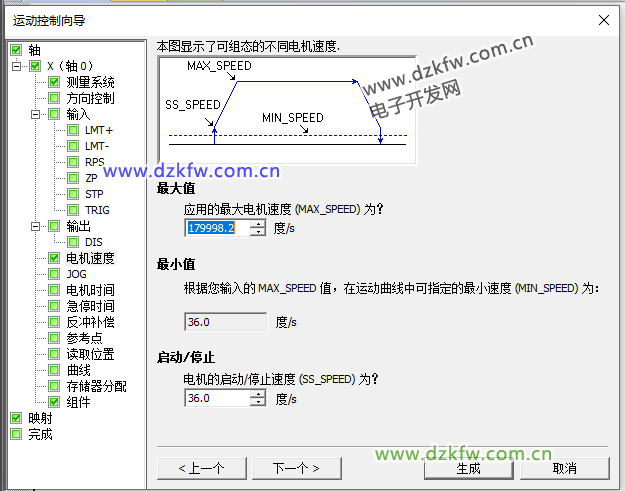
╣żŠ▀-▀\äė ╝ė▌d▀\äė┐žųŲŽ“ī¦Ż¼▀xō±Ī░▌S0Ī▒║¾å╬ō¶Ž┬ę╗éĆ
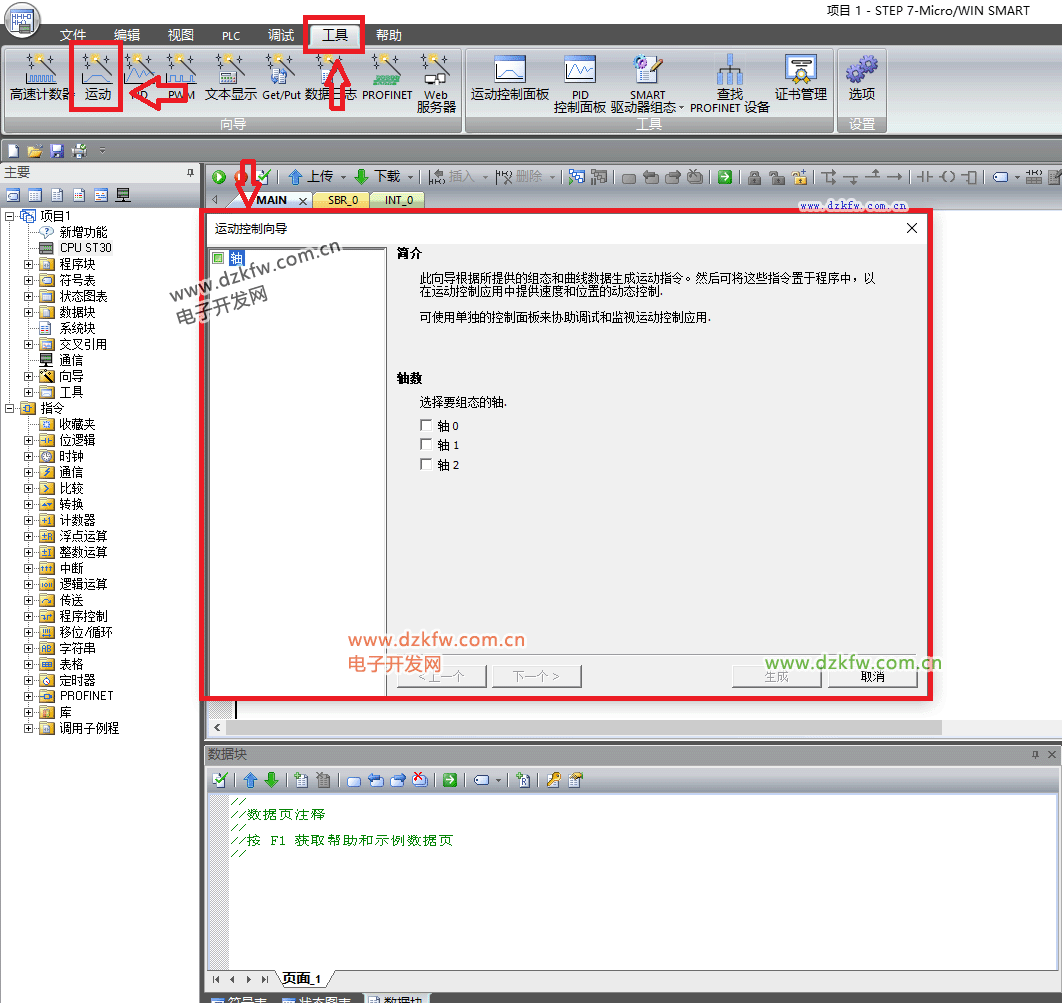
īóįō▌S├³├¹║¾▀xō±Ž┬ę╗éĆ
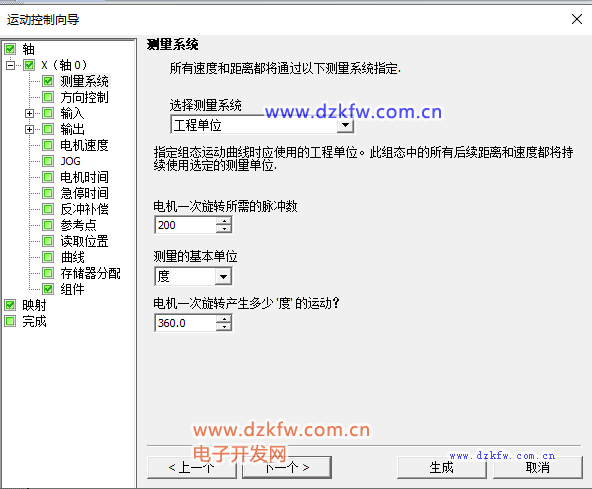
įOČ©ļŖÖCģóöĄĪŻĮY║Ž▓Į▀MļŖÖC▓Į▀MĮŪ1.8ĪŃ▀@éĆģóöĄĄ├ų¬Ż¼ļŖÖCą²▐Dę╗ų▄360.ą²▐Dę╗ų▄ąĶꬥ─├}ø_öĄ┴┐×ķ360/1.8=200├}ø_
£y┴┐å╬╬╗įOČ©×ķČ╚ĪŻŻ©╚¶┤Ņ┼õ░▓čbĮzŚU║¾Ż¼┐╔ęįĖ∙ō■ī¦│╠Ż¼įOČ©£y┴┐å╬╬╗×ķmmŻ¼─Ū├┤ę╗┤╬ą²▐D«a╔·Ą─ŠÓļx×ķę╗éĆī¦│╠Ż¼├}ø_öĄ┴┐▓╗ūāŻ®
įOČ©║├ų«║¾▀xō±Ī░Ž┬ę╗▓ĮĪ▒ĪŻ
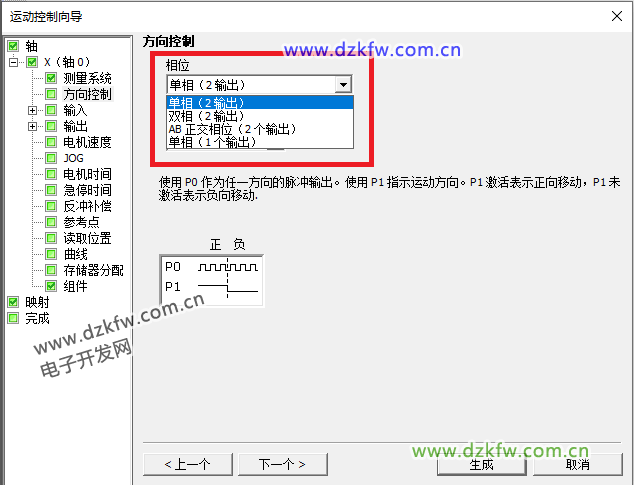
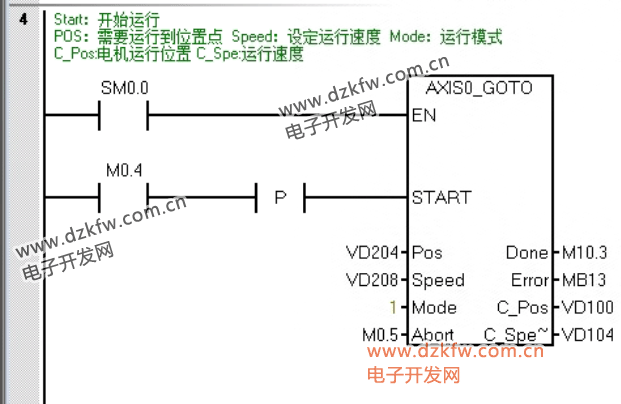
ĘĮŽ“┐žųŲ▀xō±
å╬ĒŚŻ©2▌ö│÷Ż®Ż║P0├}ø_┐žųŲ▀\äėŻ¼P1Ė▀Ą═ļŖŲĮ┐žųŲĘĮŽ“
ļpŽ“Ż©2▌ö│÷Ż®Ż║P0├}ø_┐žųŲę╗éĆĘĮŽ“▀\äėŻ¼P1├}ø_┐žųŲ┴Ēę╗éĆĘĮŽ“▀\äė
ABš²Į╗ŽÓ╬╗Ż©2▌ö│÷Ż®Ż║P0║═P1Š∙ęį├³┴ŅĄ─╦┘┬╩░l│÷├}ø_ĪŻĘĮŽ“ė╔ā╔éĆ├}ø_═©Ą└Ą─ŽÓ╬╗øQČ©ĪŻP0į┌P1ų«Ū░▐DōQŻ¼ĘĮŽ“×ķš²ĪŻP0į┌P1ų«║¾▐DōQŻ¼ĘĮŽ“×ķžō
å╬ŽÓŻ©1▌ö│÷Ż®Ż║āHPO▌ö│÷Ż¼¤oĘĮŽ“┐žųŲ
▓ķķå±R▀_┐žųŲŲ„╩ųāįŻ¼▀@└’▀xō±å╬ŽÓŻ©2▌ö│÷Ż®
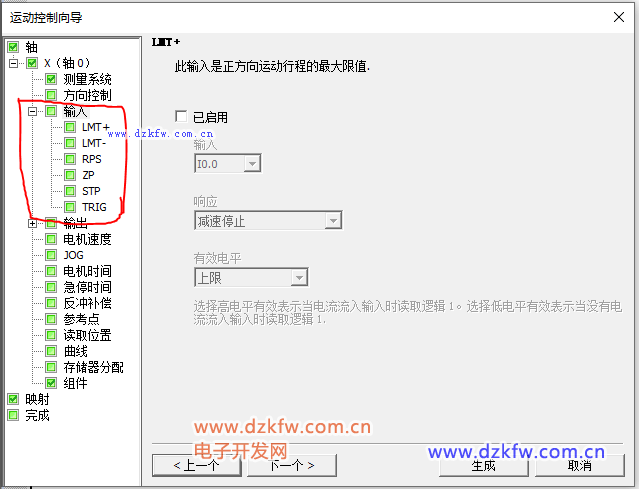
³cō¶Ī░Ž┬ę╗éĆĪ▒
I0▌ö╚ļČ╦įOČ©ĪŻ
LMT+Ż║╔ŽŽ▐╬╗ų├é„ĖąŲ„▌ö╚ļ
LMT-Ż║Ž┬Ž▐╬╗ų├é„ĖąŲ„▌ö╚ļ
STPŻ║═Żų╣
╝ė╔Ž▌ö╚ļą┼╠¢
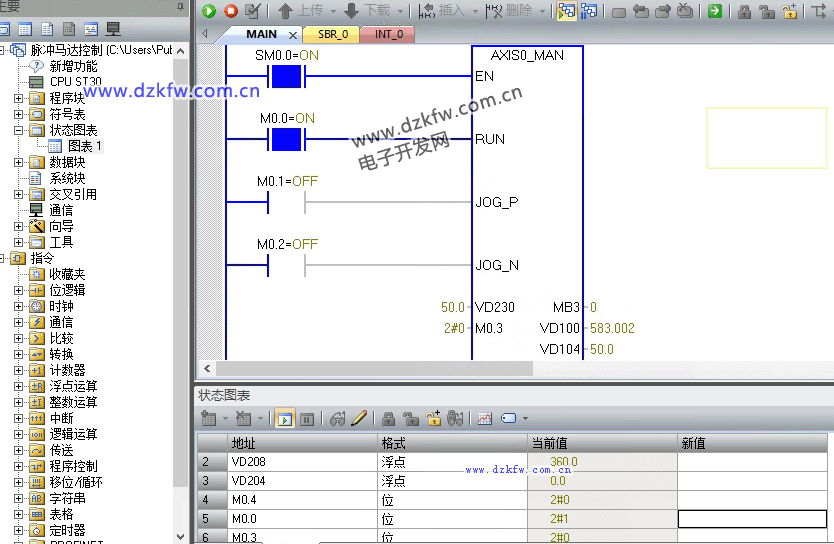
įOČ©ļŖÖC▀\▐DūŅ┤¾╦┘Č╚Īó╝ė╦┘Č╚
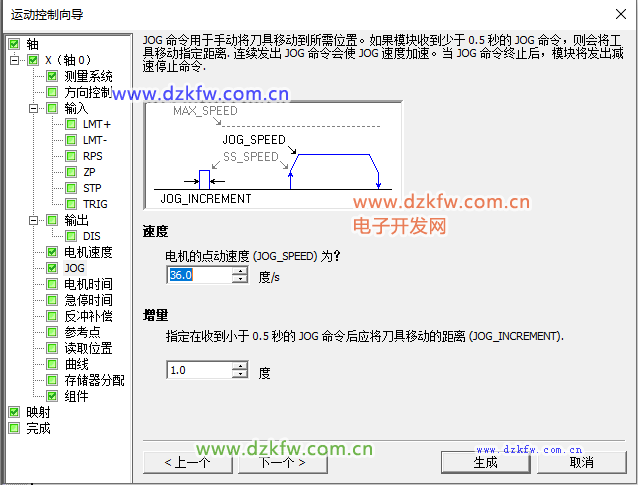
įOČ©Jog▀\äė▓ĮķL╝░▀\äė╦┘Č╚ĪŻįOČ©║├ų«║¾³cō¶Ī░╔·│╔Ī▒ĪŻ
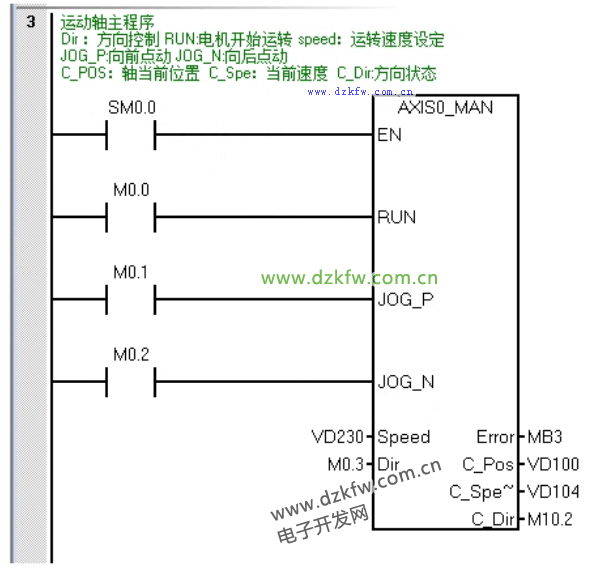
1Īó±R▀_š²Ž“ĪóĘ┤Ž“▀\ąą║═Jog+/Jog-³cäė
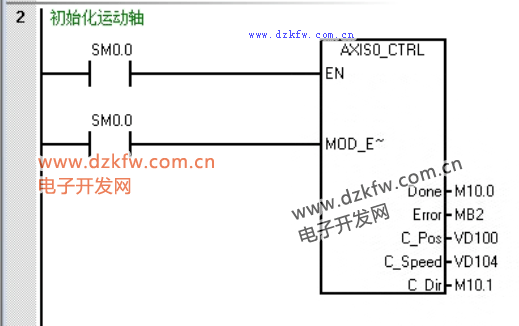
įOČ©╦┘Č╚×ķ50▐D/sŻ¼Įė═©M0.0Ż¼ļŖÖCķ_╩╝š²Ž“▀\ąą
įOČ©╦┘Č╚50▐D/sŻ¼Įė═©M0.3║¾Įė═©M0.0,ļŖÖCķ_╩╝Ę┤Ž“▀\ąą
Įė═©M0.1Ż¼ļŖÖCš²Ž“³cäė
Įė═©M0.2Ż¼ļŖÖCĘ┤Ž“³cäė
įOČ©mode 1Ż¼ŽÓī”╬╗ų├▀\ąą─Ż╩ĮĪŻįOČ©VD204 5000
Ż¼Įė═©M0.4║¾Ż¼ļŖÖC▀\ąą5000▐DĪŻ
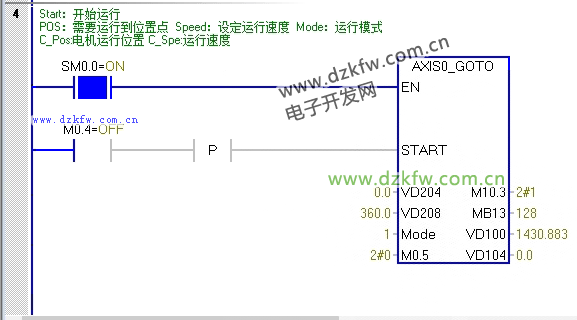
£yįć│╔╣”ŻĪŻĪŻĪ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū