
ĪĪĪĪīŹļHĄ─æ¬ė├ųą╬ęéāąĶę¬┐╝æ]ĄĮ▓Į▀MļŖÖCį┌Ħ▌dĄ─ŪķørŽ┬¤oĘ©Ė▀╦┘åóäėŻ¼╦∙ęįąĶę¬▓Į▀MļŖÖCį┌åóäėĢr╩╣ė├▌^Ą═Ą─├}ø_Ņl┬╩Ż¼╚╗║¾ų▓Į╠ß╔²╦┘Č╚Ż¼Ę±ätĢ■ėą╩¦▓Į║═▀^ø_Ą─¼FŽ¾│÷¼FĪŻ═¼Ģrę╗░ŃĄ─▓Į▀MļŖÖC╩╣ė├ł÷║ŽČ╝╩Ūķ_ŁhĄ─Ż¼ę╗Ą®│÷¼F┴╦╩¦▓Į║═▀^ø_ät╩Ū▓╗┐╔╗ųÅ═Ą─š`▓ŅĪŻ(╦┼Ę■ļŖÖC▀@ĘNŪķørę¬║├ę╗ą®Ą½į┌žō▌d╠½┤¾Ą─ŪķørŽ┬╚į╚╗Ģ■ėąåóäė▓╗┴╦Ą─¼FŽ¾)
ĪĪĪĪ×ķ┴╦Ę└ų╣│÷¼F╩¦▓Į║═▀^ø_Ą─ŪķørŻ¼╬ęéā═©│ŻĢ■ūī▓Į▀MļŖÖCį┌Ą═╦┘åóäė║¾į┘ų▓Į╠ß╔²╦┘Č╚Ż¼į┌╝ė╦┘▀^│╠ųąŻ¼ūŅ║├Ą─╩ŪSą═╝ė╦┘Ż¼Są═╝ė╦┘Ą─╝ė╦┘Č╚╩ŪŠĆąįĄ─Ż¼▀@ī”ė┌ÖCąĄ║═ļŖÖCüĒšf╩ŪūŅ╬Ū║ŽŲõ╠žąįĄ─ĪŻį┌īŹļHĄ─æ¬ė├ųąŻ¼┤¾ČÓöĄ╩Ū▓╔ė├Ą─ŠĆąį╝ė£p╦┘Ż¼▀@ī”ė┌┤¾ČÓöĄĄ─æ¬ė├üĒšfę▓╩ŪūŃē“┴╦Ą─ĪŻ
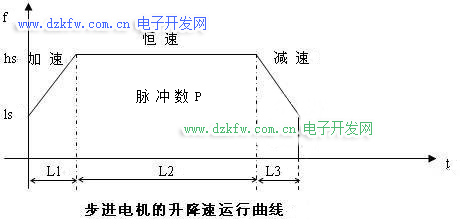
ĪĪĪĪ▓Į▀MļŖÖCĄ─š²Ę┤▐DŻ║
ĪĪĪĪ▀\┐žŽĄĮyųąĄ─š²Ę┤▐D╩Ū║▄│Żė├Ą─ĘĮ╩ĮŻ¼ė╔ė┌▓Į▀MļŖÖCø]ėąÄ¦Ę┤üčbų├Ż¼╦∙ęį▓Į▀MļŖÖC▓╗▀m║ŽĖ▀╦┘Ą─š²Ę┤▐DŻ¼ę╗░ŃČ°čįŻ¼į┌┐š▌dĄ─ŪķørŽ┬ąą│╠į┌100éĆ├}ø_═∙Ę┤▐DŻ¼▓Į▀MļŖÖCĄ─š²Ę┤▐DŅl┬╩ų╗─▄▀_ĄĮ10┤╬/├ļęįŽ┬(┤¾ČÓöĄĄ─į┌5┤╬/├ļęįŽ┬)Ż¼╦┼Ę■ļŖÖCĄ─š²Ę┤▐DŅl┬╩┐╔ęį▀_ĄĮ50┤╬/├ļęįŽ┬(äéąį꬚{Ą├▒╚▌^Ė▀)ĪŻ▓╗═¼ÅS╔╠Ą─ļŖÖC▓╗═¼Ż¼ų„ę¬┼cæT┴┐Ą─┤¾ąĪėąĻPŽĄĪŻ
ĪĪĪĪš²Ę┤▐DĢrŻ¼ąĶę¬║▄║├Ą─╝ė£p╦┘┐žųŲĄ─ų¦│ųŻ¼Ę±ätĢ■│÷¼F╩¦▓Į║═▀^ø_Ą─ŪķørŻ¼╦┼Ę■ŽĄĮy▀ĆĢ■│÷¼F▀Ćø]ĄĮ╬╗Š═ķ_╩╝Ę┤▐DĄ─ŪķørĪŻ
ĪĪĪĪį┌īŹļHĄ─æ¬ė├ų«ųą╬ęéā▀Ć│Żė├ĮėĮ³ķ_ĻPĪó╣ŌļŖķ_ĻPĪóŠÄ┤aŲ„Īó╣Ō¢┼│▀üĒ┼c▓Į▀MļŖÖC┼õ║Ž═Ļ│╔╬╗ų├┐žųŲĪŻ▀@ą®ĘĮĘ©ųą┐╔ęįĘų×ķā╔┤¾ŅÉę╗ŅÉ╩Ūķ_ĻPą═Č©╬╗Ż¼ę╗ŅÉ╩Ūū°ś╦Č©╬╗ĪŻ
ĪĪĪĪķ_ĻPą═Č©╬╗Ż║
ĪĪĪĪ░³└©ĮėĮ³ķ_ĻPĪó╣ŌļŖķ_ĻPĪóĮėė|ķ_ĻPĄ╚Ż¼▀@ą®ķ_ĻPūŅ│Żė├Ą─╩Ū░▓ų├į┌įŁ³cŻ¼ė├üĒś╦┴Ń║═Ž¹│²└█Ęeš`▓ŅĪŻ▀@ą®ŽĄĮyį┌╔ŽļŖ║¾ę╗░ŃČ╝ėąšęįŁ³cĄ─äėū„▀^│╠Ż¼═©│ŻČ╝╩Ū╔ŽļŖ║¾Ž“ę╗éĆĘĮŽ“▀\äėšęĄĮįŁ³c║¾ś╦Č©įŁ³cū°ś╦Ż¼╚╗║¾ķ_╩╝š²│Ż╣żū„ĪŻ
ĪĪĪĪū°ś╦Č©╬╗Ż║
ĪĪĪĪ▀@ę╗ŅÉĄ─┐žųŲ▓╔ė├ŠÄ┤aŲ„Īó╣Ō¢┼│▀ĪóļŖūė│▀(─ŻöMļŖē║Įė┐┌)ų«ŅÉĄ─Ż¼ŲõųąėųĘų×ķĮ^ī”ŠÄ┤a║═ŽÓī”ŠÄ┤aā╔ŅÉŻ¼ŅÖ├¹╦╝┴xĮ^ī”ŠÄ┤aĄ─▌ö│÷ą┼╠¢╩ŪĮ^ī”ū°ś╦Ż¼═©│Ż╩Ū▓󹹥─┐éŠĆŻ¼Č°ŽÓī”ŠÄ┤aĄ─▌ö│÷ą┼╠¢ų╗╩Ū┤«ąąĄ─├}ø_ą┼╠¢Ż¼ę“×ķĮ^ī”ŠÄ┤aŲ„▒╚▌^┘FŻ¼╦∙ęį┤¾ČÓöĄĄ─¼Fł÷Č╝╩╣ė├ŽÓī”ŠÄ┤aĪŻ
ĪĪĪĪŽÓī”ŠÄ┤aĄ─ą┼╠¢ėąABŽÓĪóĘĮŽ“├}ø_Īó╔ŽŽ┬├}ø_╚²┤¾ŅÉ
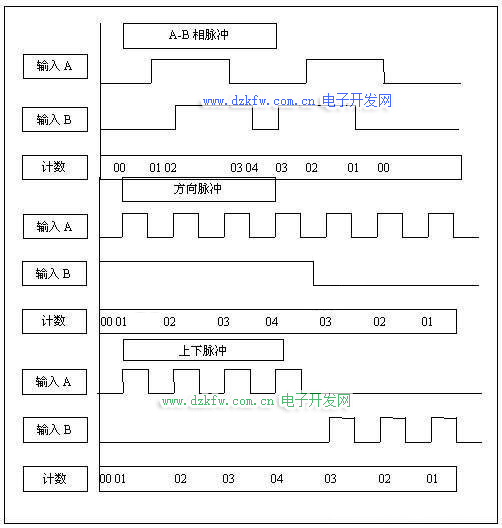
ĪĪĪĪABŽÓėųĘų×ķ*1Īó*2Īó*4╚²ĘN╝ÜĘųĘĮ╩ĮŻ¼*1Ż¼▒Ē╩ŠABŽÓĖ„üĒę╗éĆ├}ø_ėŗöĄųĄ╝ė╗“£p1Ż¼*2▒Ē╩ŠABŽÓĄ─╚╬ę╗╔Ž╔²čž╝ė╗“£p1Ż¼*4▒Ē╩ŠABŽÓĄ─╚╬ę╗├}ø_Ą─╔Ž╔²čž╗“š▀Ž┬ĮĄčžŠ∙╝ė╗“£p1ĪŻV80Ą─ABŽÓ├}ø_ėŗöĄĘĮ╩Įų╗ų¦│ų*4Ą─╝ÜĘųĘĮ╩ĮĪŻ
ĪĪĪĪ┤¾ČÓöĄĄ─ŠÄ┤aŲ„Š∙╩ŪABŽÓĄ─ą┼╠¢Ż¼╗“š▀╩ŪABZą┼╠¢Ż¼ABZą┼╠¢ŽÓī”ė┌ABŽÓą┼╠¢ČÓ┴╦ę╗éĆZą┼╠¢ŠĆŻ¼ė├üĒś╦╩ŠŠÄ┤aŲ„Ą─┴Ń³cŻ¼ŠÄ┤aŲ„├┐▐Dę╗╚”│÷ę╗éĆ├}ø_ĪŻ
ĪĪĪĪļŖūė│▀Ż║
ĪĪĪĪļŖūė│▀ČÓė├į┌Ė„ĘNŠÓļxėŗ┴┐Ą─čbéõ╔Ž├µŻ¼▒╚ĘĮšfūó╦▄ÖCĄ─╔õ─zļŖūė│▀Īó║Ž─ŻļŖūė│▀Ą╚ĪŻļŖūė│▀┐╔▓╔ė├├}ø_Įė┐┌╗“š▀─ŻöM┴┐Įė┐┌(ļŖ╬╗Ų„)Ż¼PLCąĶę¬═©▀^─ŻöM┴┐▌ö╚ļ─ŻēKüĒ▓╔śėŻ¼Ą½╩Ū┤¾ČÓöĄPLCĄ──ŻöM┴┐▌ö╚ļ─ŻēKĄ─Ēææ¬╦┘Č╚╠½┬²¤oĘ©ØMūŃ¼Fł÷Ą─ę¬Ū¾(═©│ŻĄ─▓╔śėų▄Ų┌į┌100mSū¾ėę)ĪŻV80Ą─Ė▀╦┘─ŻöM┴┐öUš╣─ŻēKE6MAD┐╔ęį▀_ĄĮmSĄ─▓╔śėų▄Ų┌Ż¼╦∙ęį┐╔ęįė├üĒīŹ¼FĖ▀╦┘Ą──ŻöM┴┐ļŖūė│▀Įė┐┌ĪŻ
ĪĪĪĪ╗∙▒Š╔Ž┤¾ČÓöĄ▀\äė┐žųŲČ╝┐╔ęįė╔╔Ž├µĄ─╣”─▄ĮM║ŽČ°│╔Ż¼ī”▀@ą®Ė┼─Ņėąę╗éĆ╗∙▒ŠĄ─šJūR╩Ūš²┤_╩╣ė├▀\äė┐žųŲ╣”─▄Ą─Ū░╠ßĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū