
ĪĪĪĪę“×ķPIŽĄĮy(t©»ng)ųąĄ─IĄ─┤µį┌Ģ■╩╣š¹éĆ┐žųŲŽĄĮy(t©»ng)Ą─Ēææ¬(y©®ng)╦┘Č╚╩▄ĄĮė░ĒæŻ¼×ķ┴╦ĮŌøQ▀@éĆå¢Ņ}Ż¼╬ęéāį┌┐žųŲųąį÷╝ė┴╦D╬óĘųĒŚŻ¼╬óĘųĒŚų„ę¬ė├üĒĮŌøQŽĄĮy(t©»ng)Ą─Ēææ¬(y©®ng)╦┘Č╚å¢Ņ}Ż¼Ųõ═Ļš¹Ą─╣½╩Į╚ńŽ┬Ż║
ĪĪĪĪu(t) = Kp*e(t) + KiĪŲe(t) + Kd[e(t) ©C e(t-1)]+u0
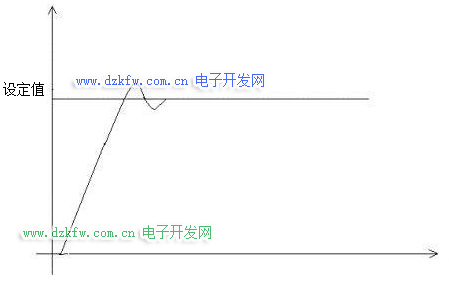
ĪĪĪĪį┌─ŻöMļŖ┬ĘųąĄ─╬óĘų│ŻöĄ(sh©┤)╩Ū┼c╠žš„Ņl┬╩ŽÓĻP(gu©Īn)ŽĄĄ─Ż¼Č°į┌öĄ(sh©┤)ūųļx╔óPIDųąĄ─╬óĘųĒŚīŹļH╔Ž╩Ūėąę╗ą®å¢Ņ}Ą─Ż¼ę“×ķŲõų╗ėŗ╦Ń┴╦ā╔┤╬š`▓ŅĄ─▓ŅųĄŻ¼Č°īŹļHĄ──ŻöMPID╗“š▀ė├æ¶ąĶꬥ─└ĒŽļ╬óĘų╣½╩Įæ¬(y©®ng)įō╩Ūę¬ī”Ųõ▀Mąąš╣īÆĄ─Ż¼ų╗ėąš╣īÆĄ─DųĄ▓┼─▄šµš²Ą─ŲĄĮ║▄║├Ą─ą¦╣¹ĪŻ╬óĘųĒŚį┌┐žųŲŽĄĮy(t©»ng)ųąŲĄĮ£p╔┘│¼š{(di©żo)ĮĄĄ═š±╩ÄĄ─ū„ė├Ż¼Ą½ę“×ķ╬óĘųĒŚ▒Š╔Ēī”ė┌Ė╔ö_║▄├¶ĖąŻ¼╦∙ęįį┌╩╣ė├╬óĘųĒŚĢrę¬╔„ųžĪŻ
ĪĪĪĪį┌PIDĄ─š{(di©żo)įć▀^│╠ųąŻ¼╬ęéāæ¬(y©®ng)ūóęŌęįŽ┬▓Į¾EŻ║
ĪĪĪĪ1Īó ĻP(gu©Īn)ķ]I║═DŻ¼╝ė┤¾PŻ¼╩╣Ųõ«a(ch©Żn)╔·š±╩Ä;
ĪĪĪĪ2Īó £pąĪPŻ¼šęĄĮ┼RĮńš±╩ijc;
ĪĪĪĪ3Īó ╝ė┤¾IŻ¼╩╣Ųõ▀_ĄĮ─┐ś╦ųĄ;
ĪĪĪĪ4Īó ųžą┬╔ŽļŖ┐┤│¼š{(di©żo)Īóš±╩Ä║═ĘĆ(w©¦n)Č©Ģrķg╩Ūʱ╬Ū║Žę¬Ū¾;
ĪĪĪĪ5Īó ßśī”│¼š{(di©żo)║═š±╩ÄĄ─Ūķør▀m«ö(d©Īng)?sh©┤)─į÷╝ėę╗ą®╬óĘųĒ?
ĪĪĪĪ6Īó ūóęŌ╦∙ėąš{(di©żo)įćŠ∙æ¬(y©®ng)į┌ūŅ┤¾ĀÄ▌dĄ─ŪķørŽ┬š{(di©żo)įćŻ¼▀@śė▓┼─▄▒ŻūCš{(di©żo)įć═ĻĄ─ĮY(ji©”)╣¹┐╔ęįį┌╚½╣żū„ĘČć·ā╚(n©©i)Š∙ėąą¦;
ĪĪĪĪ╬╗ų├PID┼cį÷┴┐PIDŻ║
ĪĪĪĪŪ░├µ╬ęéā╦∙šfĄ─PID╣½╩ĮŠ∙╩Ū╬╗ų├PIDŻ¼ę▓ĘQ×ķ╚½┴┐PIDŻ¼▀@į┌£ž┐žĪóķyķT┐žųŲĪó╦«▒├┐žųŲųąūŅ│Żė├ĄĮŻ¼┴Ēę╗ĘNPID╣½╩ĮĘQų«×ķį÷┴┐PIDŲõ╣½╩Į╚ńŽ┬Ż║
ĪĪĪĪĪ„u(t) = u(t) ©C u(t-1)
ĪĪĪĪ▀@į┌▀\äė┐žųŲųąūŅ│Ż╩╣ė├Ż¼Ųõ▌ö│÷╩Ūā╔┤╬PID▀\╦ŃĮY(ji©”)╣¹Ą─▓ŅųĄŻ¼ę╗░ŃĄ─▓Į▀M╗“š▀╦┼Ę■ļŖÖCĄ─╬╗ų├┐žųŲ┐╔ęį▓╔ė├▀@ĘNĘĮ╩ĮĪŻ
ĪĪĪĪČ■╩«ę╗Īó▀\äė┐žųŲ
ĪĪĪĪ▀\äė┐žųŲ╩ŪĮ³ą®─ĻĄ─¤ßķTŻ¼Š½├▄Č©╬╗Īó║Ń╦┘┐žųŲĪó║Ń┴”Šž┐žųŲĄ╚į┌Ė„ĘNčbéõųąĄ─æ¬(y©®ng)ė├įĮüĒįĮÅVĘ║Ż¼▀@ī”ė┌┐žųŲŲ„Ą─ę¬Ū¾ę▓įĮüĒįĮĖ▀ĪŻ
ĪĪĪĪī”ė┌▀\äė┐žųŲŻ¼┤¾╝ę▒╚▌^│Żė├Ą─░³└©▓Į▀MļŖÖCĪó╦┼Ę■ļŖÖCŻ¼│²┤╦ų«═Ō╦┼Ę■ķyĪóöĄ(sh©┤)ūųę║ē║Ą╚Č╝ī┘ė┌═¼ę╗ŅÉĄ─┐žųŲĘĮ╩ĮĪŻį┌▀@ą®▀\┐žŽĄĮy(t©»ng)ųąŻ¼╬ęéāėųĖ∙ō■(j©┤)┐žųŲī”Ž¾Ą─▓╗═¼Ęų×ķ╬╗ų├┐žųŲĪó╦┘Č╚┐žųŲĪó┴”Šž┐žųŲ╚²┤¾ŅÉĪŻŲõųą▓Į▀MļŖÖCų╗─▄æ¬(y©®ng)ė├ė┌╬╗ų├┐žųŲŻ¼Č°╦┼Ę■ät┐╔ęįæ¬(y©®ng)ė├ė┌▀@╚²ŅÉųąĄ─╚╬ę╗ĘN┐žųŲĘĮ╩ĮĪŻ
ĪĪĪĪį┌▀\äė┐žųŲŽĄĮy(t©»ng)ųą╬ęéāę╗░Ń┐╔ęį╩╣ė├īŻė├Ą─▀\äė┐žųŲŲ„╗“š▀PLCüĒīŹ¼F(xi©żn)▀\äė┐žųŲ╣”─▄Ż¼ę╗░ŃüĒšfīŻė├Ą─▀\äė┐žųŲŲ„╚ńöĄ(sh©┤)┐žŽĄĮy(t©»ng)Ą╚Ģ■Ė³×ķīŻśI(y©©)╣”─▄Ė³ÅŖŻ¼ī”ė┌▓ÕčaĪóGųĖ┴ŅĄ─ų¦│ųĢ■Ė³║├ĪŻ
ĪĪĪĪ▒╚ĘĮšfĖ▀ÖnĄ─öĄ(sh©┤)┐žŽĄĮy(t©»ng)┐╔─▄Ģ■ų¦│ųęįŽ┬Ą─╣”─▄Ż║ė├æ¶ė├CAD«ŗ═ĻłD║¾▐D(zhu©Żn)ōQ│╔G┤·┤aŽ┬▌dĮo┐žųŲŲ„Ż¼┐žųŲŲ„Š═┐╔ęįł╠(zh©¬)ąąī”æ¬(y©®ng)Ą─G┤·┤a═Ļ│╔š¹éĆ┐žųŲ▀^│╠ĪŻ
ĪĪĪĪČ°PLCŽÓī”Č°čį╩Ūę╗éĆĖ³×ķ═©ė├Ą─┐žųŲŲĮ┼_Ż¼ę╗░Ń═©▀^╣”─▄ēKüĒīŹ¼F(xi©żn)▀\äė┐žųŲ╣”─▄Ż¼V80į÷ÅŖŽĄ┴ą(/S)ī”ė┌ā╔▌SĄ─╬╗ų├┐žųŲėą║▄ÅŖĄ─ų¦ō╬Ż¼┐╔ęįØMūŃĮ^┤¾ČÓöĄ(sh©┤)▀\äė┐žųŲę¬Ū¾Ą─Łh(hu©ón)Š│Ż¼V80Ą─╦┘Č╚┐žųŲ║═┴”Šž┐žųŲę╗░Ń╩╣ė├E6MADöUš╣─ŻēKüĒīŹ¼F(xi©żn)Ż¼į┌▀@└’╬ęéā╠ߥĮĄ─▀\äė┐žųŲ╩ŪCPU─ŻēK▒Š╔ĒĄ─╬╗ų├┐žųŲ╣”─▄ĪŻ
ĪĪĪĪ21.1Īó╬╗ų├┐žųŲ╗∙ĄA(ch©│)
ĪĪĪĪį┌čbéõ┐žųŲųąėąŽÓ«ö(d©Īng)ČÓĄ─ł÷║ŽąĶę¬ė├ĄĮ╬╗ų├Č©╬╗┐žųŲŻ¼╚ńĖ„ĘNÖC┤▓Īó╩šŠĒ┼┼ŠĆĪó╝łÅłļŖ└|╣▄▓─Ą─Č©ķL▓├╝¶Īó░³čbĪóėĪ╦óĄ╚ĪŻ╬╗ų├┐žųŲĄ─īŹ¼F(xi©żn)Ż¼═©│Ż╩Ū═©▀^▓Į▀MļŖÖC║═╦┼Ę■ļŖÖCüĒ▀_ĄĮĄ─Ż¼Ž┬├µ╬ęéāĮy(t©»ng)ę╗ęį▓Į▀MļŖÖCüĒ├Ķ╩÷ĪŻ
ĪĪĪĪ▓Į▀MļŖÖC╩ŪīóļŖ├}ø_ą┼╠¢▐D(zhu©Żn)ūā?y©Łu)ķĮŪ╬╗ęŲ╗“ŠĆ╬╗ęŲĄ─ķ_Łh(hu©ón)┐žųŲį¬╝■ĪŻį┌ĘŪ│¼▌dĄ─ŪķørŽ┬Ż¼ļŖÖCĄ─▐D(zhu©Żn)╦┘Īó═Żų╣Ą─╬╗ų├ų╗╚ĪøQė┌├}ø_ą┼╠¢Ą─Ņl┬╩║═├}ø_öĄ(sh©┤)Ż¼Č°▓╗╩▄žō▌dūā╗»Ą─ė░ĒæŻ¼╝┤ĮoļŖÖC╝ėę╗éĆ├}ø_ą┼╠¢Ż¼ļŖÖCät▐D(zhu©Żn)▀^ę╗éĆ▓ĮŠÓĮŪĪŻ▀@ę╗ŠĆąįĻP(gu©Īn)ŽĄĄ─┤µį┌Ż¼╝ė╔Ž▓Į▀MļŖÖCų╗ėąų▄Ų┌ąįĄ─š`▓ŅČ°¤o└█Ęeš`▓ŅĄ╚╠ž³cĪŻ╩╣Ą├į┌╦┘Č╚Īó╬╗ų├Ą╚┐žųŲŅI(l©½ng)ė“ė├▓Į▀MļŖÖCüĒ┐žųŲūāĄ─ĘŪ│ŻĄ─║åå╬ĪŻ
ĪĪĪĪPLCš²╩Ū└¹ė├▓Į▀MļŖÖCĄ─▀@ĘN╠žąįüĒīŹ¼F(xi©żn)╬╗ų├┐žųŲ╣”─▄Ą─Ż¼PLC┼c▓Į▀MļŖÖCų«ķgĄ─Įė┐┌×ķ├}ø_Įė┐┌Ż¼╬ęéāĘQų«×ķPTOĪŻ
ĪĪĪĪ├}ø_┼c╬╗ų├Ą─ĻP(gu©Īn)ŽĄŻ║
ĪĪĪĪ▒╚ĘĮšf╬ęéāąĶę¬▓Į▀MļŖÖC▐D(zhu©Żn)äė90Č╚Ż¼Č°▓Į▀MļŖÖCĄ─▓ĮŠÓĮŪ×ķ0.3Č╚Ą─Ż¼─Ū├┤╬ęéāĄ─├}ø_▌ö│÷éĆöĄ(sh©┤)Š═æ¬(y©®ng)įō×ķ300éĆŻ¼«ö(d©Īng)300éĆ├}ø_▌ö│÷═Ļ«ģ║¾ļŖÖCš²║├ą²▐D(zhu©Żn)90Č╚═Żų╣ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū