
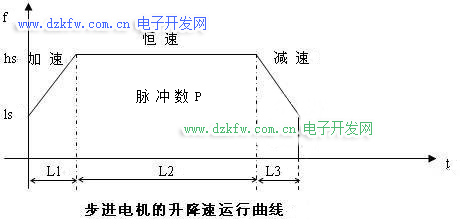
實際的應用中我們需要考慮到步進電機在帶載的情況下無法高速啟動,所以需要步進電機在啟動時使用較低的脈沖頻率,然后逐步提升速度,否則會有失步和過沖的現象出現。同時一般的步進電機使用場合都是開環的,一旦出現了失步和過沖則是不可恢復的誤差。(伺服電機這種情況要好一些但在負載太大的情況下仍然會有啟動不了的現象)
為了防止出現失步和過沖的情況,我們通常會讓步進電機在低速啟動后再逐步提升速度,在加速過程中,最好的是S型加速,S型加速的加速度是線性的,這對于機械和電機來說是最吻合其特性的。在實際的應用中,大多數是采用的線性加減速,這對于大多數的應用來說也是足夠了的。
步進電機的正反轉:
運控系統中的正反轉是很常用的方式,由于步進電機沒有帶反饋裝置,所以步進電機不適合高速的正反轉,一般而言,在空載的情況下行程在100個脈沖往反轉,步進電機的正反轉頻率只能達到10次/秒以下(大多數的在5次/秒以下),伺服電機的正反轉頻率可以達到50次/秒以下(剛性要調得比較高)。不同廠商的電機不同,主要與慣量的大小有關系。
正反轉時,需要很好的加減速控制的支持,否則會出現失步和過沖的情況,伺服系統還會出現還沒到位就開始反轉的情況。
在實際的應用之中我們還常用接近開關、光電開關、編碼器、光柵尺來與步進電機配合完成位置控制。這些方法中可以分為兩大類一類是開關型定位,一類是坐標定位。
開關型定位:
包括接近開關、光電開關、接觸開關等,這些開關最常用的是安置在原點,用來標零和消除累積誤差。這些系統在上電后一般都有找原點的動作過程,通常都是上電后向一個方向運動找到原點后標定原點坐標,然后開始正常工作。
坐標定位:
這一類的控制采用編碼器、光柵尺、電子尺(模擬電壓接口)之類的,其中又分為絕對編碼和相對編碼兩類,顧名思義絕對編碼的輸出信號是絕對坐標,通常是并行的總線,而相對編碼的輸出信號只是串行的脈沖信號,因為絕對編碼器比較貴,所以大多數的現場都使用相對編碼。
相對編碼的信號有AB相、方向脈沖、上下脈沖三大類
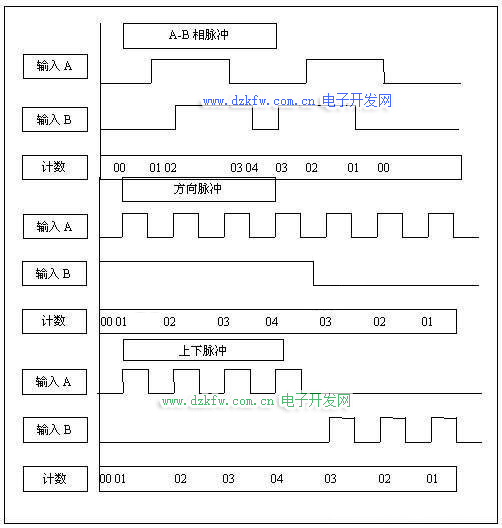
AB相又分為*1、*2、*4三種細分方式,*1,表示AB相各來一個脈沖計數值加或減1,*2表示AB相的任一上升沿加或減1,*4表示AB相的任一脈沖的上升沿或者下降沿均加或減1。V80的AB相脈沖計數方式只支持*4的細分方式。
大多數的編碼器均是AB相的信號,或者是ABZ信號,ABZ信號相對于AB相信號多了一個Z信號線,用來標示編碼器的零點,編碼器每轉一圈出一個脈沖。
電子尺:
電子尺多用在各種距離計量的裝備上面,比方說注塑機的射膠電子尺、合模電子尺等。電子尺可采用脈沖接口或者模擬量接口(電位器),PLC需要通過模擬量輸入模塊來采樣,但是大多數PLC的模擬量輸入模塊的響應速度太慢無法滿足現場的要求(通常的采樣周期在100mS左右)。V80的高速模擬量擴展模塊E6MAD可以達到mS的采樣周期,所以可以用來實現高速的模擬量電子尺接口。
基本上大多數運動控制都可以由上面的功能組合而成,對這些概念有一個基本的認識是正確使用運動控制功能的前提。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底