
01íóPID┐ÏÍãͬÎRÍv¢Ô
S7-200 SMART─▄ë‗▀MððPID┐ÏÍãíúS7-200 SMART CPUίÂÓ┐╔ÊÈͺ│Í8éÇPID┐ÏÍã╗Ï┬Àú¿8éÇPIDÍ©┴¯╣ª─▄ëKú®
PID╩ÃÚ]¡h(hu¿ón)┐ÏÍã¤Á¢y(t¿»ng)Á─ú¿▒╚└²ú¡ÀeÀÍú¡╬óÀÍú®
PID┐ÏÍã㸩¨ô■(j¿┤)ÈO(sh¿¿)¿ÍÁú¿¢o¿ú®┼c▒╗┐Ï¾Á─îìÙHÍÁú¿À┤üú®Á─▓¯ÍÁú¼░┤ııPID╦ÒÀ¿Ëï╦Ò│÷┐ÏÍãã¸Á─¦ö│÷┴┐ú¼┐ÏÍãê╠(zh¿¬)ððÖCÿï(g¿░u)╚ÑË░Ýæ▒╗┐Ï¾Á─Îâ╗»íú
PID┐ÏÍã╩ÃÏôÀ┤üÚ]¡h(hu¿ón)┐ÏÍãú¼─▄ë‗ÊÍÍã¤Á¢y(t¿»ng)Ú]¡h(hu¿ón)â╚(n¿¿i)Á─©¸ÀNÊ‗╦Ï╦¨Ê²ãÁ─ö_äËú¼╩╣À┤ü©·ÙS¢o¿Îâ╗»íú
©¨ô■(j¿┤)¥▀¾wÝù─┐Á─┐ÏÍãʬþú¼È┌îìÙHæ¬(y¿®ng)Ë├ÍðËð┐╔─▄Ë├Á¢ãõÍðÁ─Ê╗▓┐ÀÍú¼▒╚╚þ│úË├Á─╩ÃPIú¿▒╚└²ú¡ÀeÀÍú®┐ÏÍãú¼▀@òrø]Ëð╬óÀÍ┐ÏÍã▓┐ÀÍíú
PID╦ÒÀ¿È┌S7-200 SMARTÍðÁ─îì¼F(xi¿ñn)PID┐ÏÍãί│§È┌─úöM┴┐┐ÏÍã¤Á¢y(t¿»ng)Íðîì¼F(xi¿ñn)ú¼ÙSÍ°Ùx╔ó┐ÏÍã└ÝıôÁ─░l(f¿í)ı╣ú¼PIDÊ▓È┌Ëï╦ÒÖC╗»┐ÏÍã¤Á¢y(t¿»ng)Íðîì¼F(xi¿ñn)íú
02íóPID¤‗?q¿▒)º¢MæB(t¿ñi)ÈO(sh¿¿)Í├
Micro/WIN SMART╠ß╣®┴╦PID Wizardú¿PIDÍ©┴¯¤‗?q¿▒)ºú®ú¼┐╔ÊÈÄ═Í·Ë├æ¶À¢▒ÒÁÏ╔·│╔Ê╗éÇÚ]¡h(hu¿ón)┐ÏÍã▀^│╠Á─PID╦ÒÀ¿íú┤╦¤‗?q¿▒)º┐╔ÊÈ═Û│╔¢^┤¾ÂÓöÁ(sh¿┤)PID▀\╦ÒÁ─ÎÈäË¥Ä│╠ú¼Ë├æ¶Í╗ðÞÈ┌͸│╠ð‗Íðı{(di¿ño)Ë├PID¤‗?q¿▒)º╔·│╔Á─ÎË│╠ð‗ú¼¥═┐╔ÊÈ═Û│╔PID┐ÏÍã╚╬äı(w¿┤)íú
PID¤‗?q¿▒)º╝╚┐╔ÊÈ╔·│╔─úöM┴┐¦ö│÷PID┐ÏÍã╦ÒÀ¿ú¼Ê▓ͺ│ÍÚ_ÛP(gu¿ín)┴┐¦ö│÷ú╗╝╚ͺ│Í▀B└m(x¿┤)ÎÈäËı{(di¿ño)╣Ø(ji¿ª)ú¼Ê▓ͺ│Í╩ÍäËàó┼c┐ÏÍãíú¢¿ÎhË├æ¶╩╣Ë├┤╦¤‗?q¿▒)ºîªPID¥Ä│╠ú¼ÊÈ▒▄├Ô▓╗▒ÏʬÁ─Õeı`íú
PID¤‗?q¿▒)º¥Ä│╠¢MæB(t¿ñi)▓¢¾Eú║1.È┌Micro/WIN SMARTÍðÁ─╣ñ¥▀▓╦å╬Íð▀xô±PID¤‗?q¿▒)ºú?BR>

êD1. È┌╣ñ¥▀Ö┌Íð▀xô±PID¤‗?q¿▒)?/P>

êD2.È┌Ýù─┐ÿõÍð┤‗Ú_'¤‗?q¿▒)?╬─╝■èAú¼╚╗║¾Ùpô¶'PID'ú¼╗‗▀xô±'PID'▓ó░┤╗Ï▄çµIíú
¿┴xðÞʬ┼õÍ├Á─PID╗Ï┬À╠û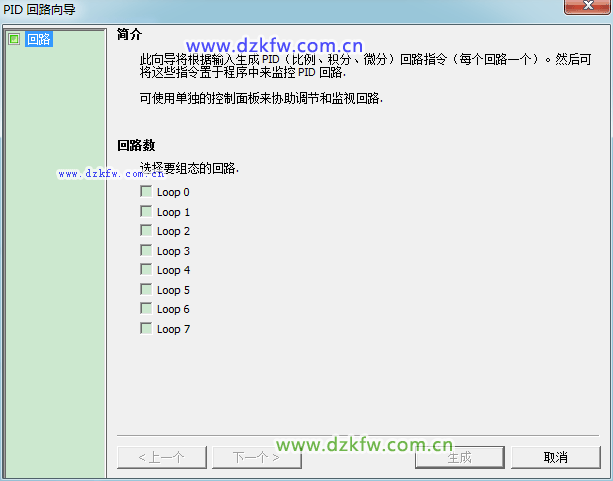
êD3.È┌┤╦îªÈÆ┐‗Íð▀xô±Ê¬¢MæB(t¿ñi)Á─╗Ï┬À? 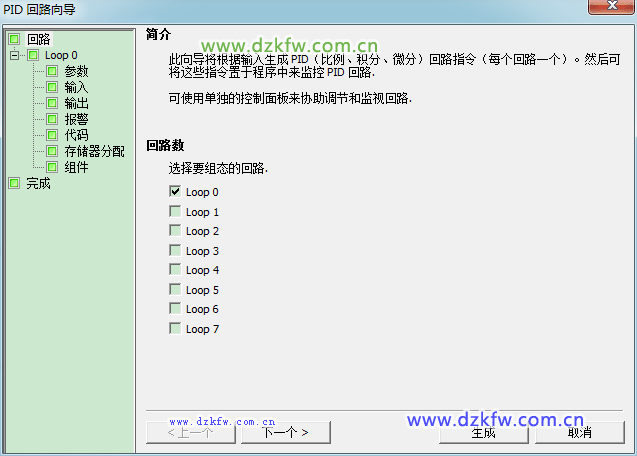
êD4.ίÂÓ┐╔¢MæB(t¿ñi) 8 éÇ╗Ï┬ÀíúÈ┌┤╦îªÈÆ┐‗╔¤▀xô±╗Ï┬Àòrú¼PID ¤‗?q¿▒)ºÎ¾é?c¿¿)Á─ÿõÊòêDÙS¢MæB(t¿ñi)Èô╗Ï┬À╦¨ðÞÁ─╦¨Ëð╣Ø(ji¿ª)³cÊ╗㩳ð┬íú
2.×Ú╗Ï┬À¢MæB(t¿ñi)├³├¹
êD5.┐╔×Ú╗Ï┬À¢MæB(t¿ñi)ÎÈ¿┴x├¹ÀQíú┤╦▓┐ÀÍÁ──¼ıJ(r¿¿n)├¹ÀQ╩Ã'╗Ï┬À x'ú¼ãõÍð'x'Á╚Ë┌╗Ï┬À¥Ä╠û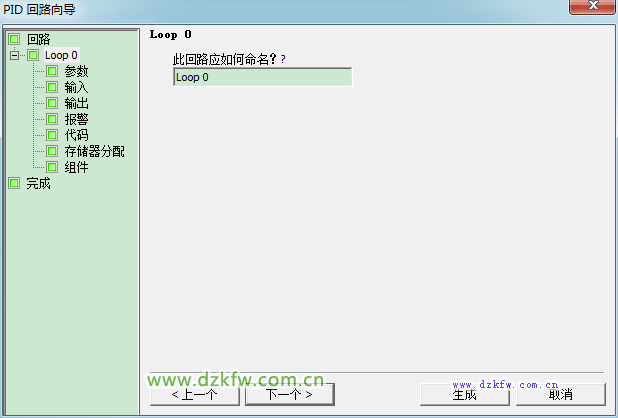
3.ÈO(sh¿¿)¿PID╗Ï┬ÀàóöÁ(sh¿┤)
êD6.ÈO(sh¿¿)Í├PIDàóöÁ(sh¿┤)Íð¿┴x┴╦PID╗Ï┬ÀàóöÁ(sh¿┤)ú¼▀@ð®àóöÁ(sh¿┤)Â╝æ¬(y¿®ng)«ö(d¿íng)╩ÃîìöÁ(sh¿┤)ú║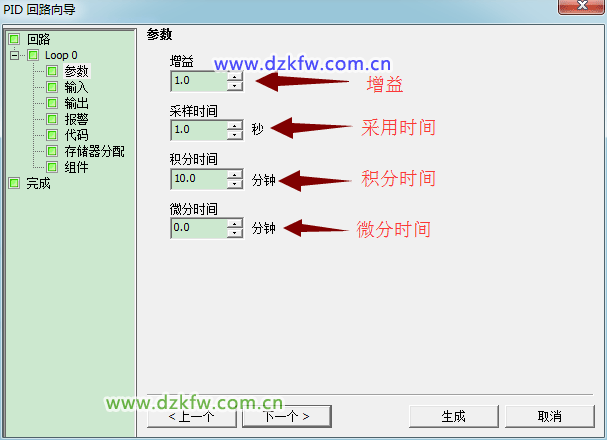
È÷ʵú║╝┤▒╚└²│úöÁ(sh¿┤)ú¼─¼ıJ(r¿¿n)ÍÁ=1.00íú
1ÀeÀÍòrÚgú║╚þ╣¹▓╗¤ÙʬÀeÀÍθË├┐╔ÊÈîóÈôÍÁÈO(sh¿¿)Í├║▄┤¾ú¿▒╚╚þ10000.0ú®ú¼─¼ıJ(r¿¿n)ÍÁ=10.00íú
2╬óÀÍòrÚgú║╚þ╣¹▓╗¤Ùʬ╬óÀÍ╗Ï┬Àú¼┐╔ÊÈ░Ð╬óÀÍòrÚgÈO(sh¿¿)×Ú0 ú¼─¼ıJ(r¿¿n)ÍÁ=0.00íú
3▓╔ÿËòrÚgú║╩ÃPID┐ÏÍã╗Ï┬ÀîªÀ┤ü▓╔ÿË║═ÍÏð┬Ëï╦Ò¦ö│÷ÍÁÁ─òrÚgÚg©¶,ú¼─¼ıJ(r¿¿n)ÍÁ=1.00íúÈ┌¤‗?q¿▒)º═Û│╔║¾ú¼╚¶¤ÙʬðÌ©─┤╦ö?sh¿┤)ú¼ät▒ÏÝÜÀÁ╗Ϥ‗?q¿▒)ºÍððÌ©─ú¼▓╗┐╔È┌│╠ð‗Íð╗‗á¯æB(t¿ñi)▒ÝÍððÌ©─íú
ÎóÊÔú║ÛP(gu¿ín)Ë┌¥▀¾wÁ─PIDàóöÁ(sh¿┤)ÍÁú¼├┐Ê╗éÇÝù─┐Â╝▓╗Ê╗ÿËú¼ðÞʬ¼F(xi¿ñn)ê÷ı{(di¿ño)ÈçüÝ¿ú¼ø]Ëð╦¨Í^¢ø(j¿®ng)‗×àóöÁ(sh¿┤)íú
4.ÈO(sh¿¿)¿╗Ï┬À▀^│╠Îâ┴┐
êD7. ÈO(sh¿¿)¿PID¦ö╚Ù▀^│╠Îâ┴┐
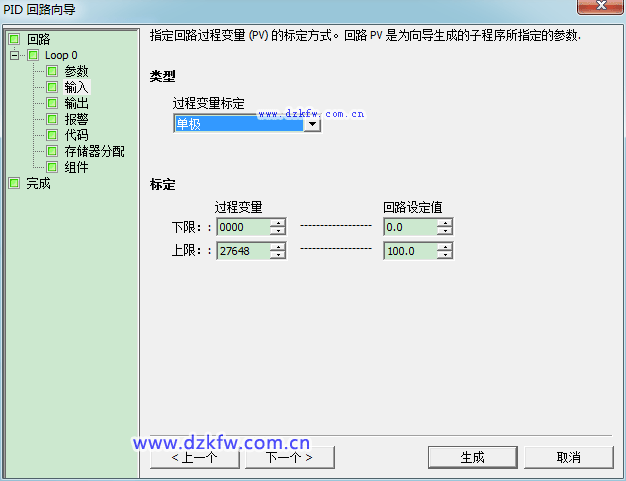
ͩ¿╗Ï┬À▀^│╠Îâ┴┐ (PV) ╚þ║╬ÿ╦(bi¿ío)¿íú┐╔ÊÈÅ─ÊȤ┬▀xÝùÍð▀xô±ú║1.å╬ÿOðÈ:╝┤¦ö╚ÙÁ─ð┼╠û×Úı²ú¼╚þ0ú¡10V╗‗0ú¡20mAÁ╚2.ÙpÿOðÈú║¦ö╚Ùð┼╠ûÈ┌Å─ÏôÁ¢ı²Á─ÀÂç·â╚(n¿¿i)Îâ╗»íú╚þ¦ö╚Ùð┼╠û×Úí└10Víóí└5VÁ╚òr▀xË├3.▀xË├20%ã½Êãú║╚þ╣¹¦ö╚Ù×Ú4ú¡20mAät▀xå╬ÿOðÈ╝░┤╦Ýùú¼4mA╩Ã0ú¡20mAð┼╠ûÁ─20%ú¼╦¨ÊÈ▀x20% ã½Êãú¼╝┤4mAîªæ¬(y¿®ng)5530ú¼20mAîªæ¬(y¿®ng)27648íú4.£ÏÂ╚ x 10 íÒC5£ÏÂ╚ x 10 íÒF
À┤ü¦ö╚Ù╚íÍÁÀÂç·1È┌a.ÈO(sh¿¿)Í├×Úå╬ÿOòrú¼╚▒╩íÍÁ×Ú0 - 27648ú¼îªæ¬(y¿®ng)¦ö╚Ù┴┐│╠ÀÂç·0 - 10V╗‗0 - 20mAÁ╚ú¼¦ö╚Ùð┼╠û×Úı²2È┌a.ÈO(sh¿¿)Í├×ÚÙpÿOòrú¼╚▒╩íÁ─╚íÍÁ×Ú-27648 - +27648ú¼îªæ¬(y¿®ng)Á─¦ö╚ÙÀÂç·©¨ô■(j¿┤)┴┐│╠▓╗═¼┐╔ÊÈ╩Ãí└10Víóí└5VÁ╚3È┌a.▀xÍð20% ã½Êã┴┐òrú¼╚íÍÁÀÂç·×Ú5530 - 27648ú¼▓╗┐╔©─ÎâÈ┌'ÿ╦(bi¿ío)¿'(Scaling) àóöÁ(sh¿┤)Íðú¼Í©Â¿╗Ï┬ÀÈO(sh¿¿)¿ÍÁ (SP) ╚þ║╬ÿ╦(bi¿ío)¿íú─¼ıJ(r¿¿n)ÍÁ╩à 0.0 ║═ 100.0 Í«ÚgÁ─Ê╗éÇîìöÁ(sh¿┤)íú┤╦À┤ü¦ö╚ÙÊ▓┐╔ÊÈ╩Ã╣ñ│╠å╬╬╗öÁ(sh¿┤)ÍÁú¼àóÊèú║ÈO(sh¿¿)Í├¢o¿ú¡À┤üÁ─┴┐│╠ÀÂç·íú
5.ÈO(sh¿¿)¿¦ö╚Ù╗Ï┬À¦ö│÷▀xÝù
êD8. ÈO(sh¿¿)¿PID¦ö│÷▀xÝù
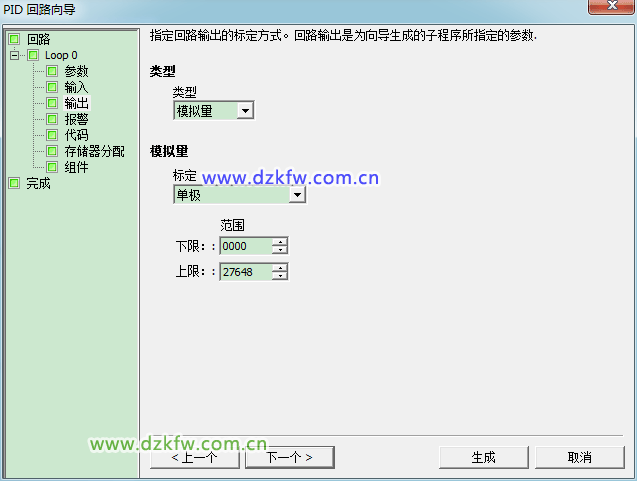
1¦ö│÷¯Éð═┐╔ÊÈ▀xô±─úöM┴┐¦ö│÷╗‗öÁ(sh¿┤)ÎÍ┴┐¦ö│÷íú─úöM┴┐¦ö│÷Ë├üÝ┐ÏÍãÊ╗ð®ðÞʬ─úöM┴┐¢o¿Á─ÈO(sh¿¿)éõú¼╚þ▒╚└²ÚyíóÎâ¯lã¸Á╚ú╗öÁ(sh¿┤)ÎÍ┴┐¦ö│÷îìÙH╔¤╩Ã┐ÏÍã¦ö│÷³cÁ─═¿íóöÓá¯æB(t¿ñi)░┤ııÊ╗¿Á─ı╝┐ı▒╚Îâ╗»ú¼┐╔ÊÈ┐ÏÍã╣╠æB(t¿ñi)└^Ùèã¸ú¿╝˃ß░¶Á╚ú®
▀xô±─úöM┴┐ätðÞÈO(sh¿¿)¿╗Ï┬À¦ö│÷Îâ┴┐ÍÁÁ─ÀÂç·ú¼┐╔ÊÈ▀xô±ú║1. å╬ÿOú║å╬ÿOðȦö│÷ú¼┐╔×Ú0ú¡10V╗‗0ú¡20mAÁ╚2. ÙpÿOú║ÙpÿOðȦö│÷ú¼┐╔×Úı²Ïô10V╗‗ı²Ïô5VÁ╚3. å╬ÿO20% ã½Êã┴┐ú║╚þ╣¹▀xÍð20% ã½Êãú¼╩╣¦ö│÷×Ú4 - 20mA4. ╚íÍÁÀÂç·ú║0. c×Úå╬ÿOòrú¼╚▒╩íÍÁ×Ú 0 Á¢ 276480. c×ÚÙpÿOòrú¼╚íÍÁ-27648 Á¢276480. c×Ú20%ã½Êã┴┐òrú¼╚íÍÁ5530 - 27648 ú¼▓╗┐╔©─Îâ?n¿¿i)þ╣¹▀xô±┴╦Ú_ÛP(gu¿ín)┴┐¦ö│÷ú¼ðÞʬÈO(sh¿¿)¿┤╦С¡h(hu¿ón)Í▄ã┌
êD9. ÈO(sh¿¿)¿PID¦ö│÷×ÚöÁ(sh¿┤)ÎÍ┴┐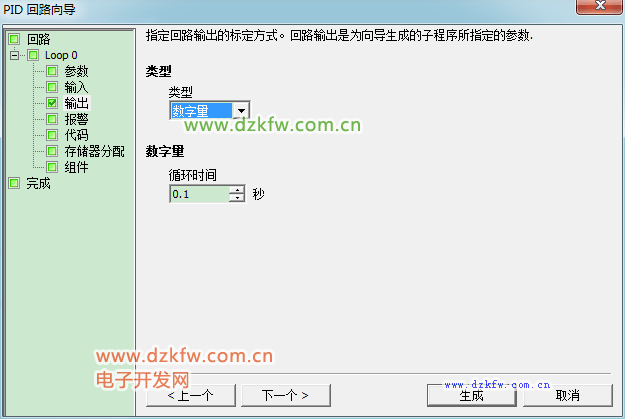
6.ÈO(sh¿¿)¿╗Ï┬Àê¾¥»▀xÝù
êD10. ÈO(sh¿¿)¿╗Ï┬Àê¾¥»¤ÌÀ¨ÍÁ

¤‗?q¿▒)º╠ß╣®┴╦╚²éǦö│÷üÝÀ┤Ë│▀^│╠ÍÁ(PV)Á─Á═ÍÁê¾¥»íó©▀ÍÁê¾¥»╝░▀^│╠ÍÁ─úöM┴┐─úëKÕeı`á¯æB(t¿ñi)íú«ö(d¿íng)ê¾¥»ùl╝■ØMÎÒòrú¼¦ö│÷Í├╬╗×Ú1íú▀@ð®╣ª─▄È┌▀xÍð┴╦¤Óæ¬(y¿®ng)Á─▀xô±┐‗Í«║¾ãθË├íú
1. ╩╣─▄Á═ÍÁê¾¥»▓óÈO(sh¿¿)¿▀^│╠ÍÁ(PV)ê¾¥»Á─Á═ÍÁú¼┤╦ÍÁ×Ú▀^│╠ÍÁÁ─░┘ÀÍ?j¿½n)?sh¿┤)ú¼╚▒╩íÍÁ×Ú0.10ú¼╝┤ê¾¥»Á─Á═ÍÁ×Ú▀^│╠ÍÁÁ─10úÑíú┤╦ÍÁίÁ═┐╔ÈO(sh¿¿)×Ú0.01ú¼╝┤ØM┴┐│╠Á─1%2. ╩╣─▄©▀ÍÁê¾¥»▓óÈO(sh¿¿)¿▀^│╠ÍÁ(PV)ê¾¥»Á─©▀ÍÁú¼┤╦ÍÁ×Ú▀^│╠ÍÁÁ─░┘ÀÍ?j¿½n)?sh¿┤)ú¼╚▒╩íÍÁ×Ú0.90ú¼╝┤ê¾¥»Á─©▀ÍÁ×Ú▀^│╠ÍÁÁ─90úÑíú┤╦ÍÁί©▀┐╔ÈO(sh¿¿)×Ú1.00ú¼╝┤ØM┴┐│╠Á─100%3. ╩╣─▄▀^│╠ÍÁ(PV)─úöM┴┐─úëKÕeı`ê¾¥»▓óÈO(sh¿¿)¿─úëKË┌CPU▀B¢Ëòr╦¨╠ÄÁ──úëK╬╗Í├íú'EM0'¥═╩ÃÁ┌Ê╗éÇöUı╣─úëKÁ─╬╗Í├
7.¿┴x¤‗?q¿▒)º╦¨╔·│╔Á─PID│§╩╝╗»ÎË│╠ð‗║═ÍðöÓ│╠ð‗├¹╝░╩Í/ÎÈäË─ú╩¢
êD11. ͩ¿ÎË│╠ð‗íóÍðöÓÀ■äı(w¿┤)│╠ð‗├¹║═▀xô±╩ÍäË┐ÏÍã
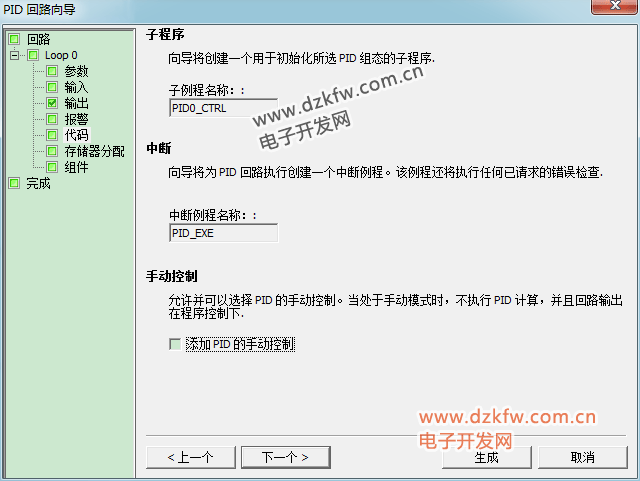
¤‗?q¿▒)ºÊТ?j¿®ng)×Ú│§╩╝╗»ÎË│╠ð‗║═ÍðöÓÎË│╠ð‗¿┴x┴╦╚▒╩í├¹ú¼─ÒÊ▓┐╔ÊÈðÌ©─│╔ÎÈ╝║ãÁ─├¹ÎÍíú
1. ͩ¿PID│§╩╝╗»ÎË│╠ð‗Á─├¹ÎÍíú
2. ͩ¿PIDÍðöÓÎË│╠ð‗Á─├¹ÎÍÎóÊÔú║
1. ╚þ╣¹─ÒÁ─Ýù─┐ÍðÊТø(j¿®ng)┤µÈ┌Ê╗éÇPID┼õÍ├ú¼ätÍðöÓ│╠ð‗├¹×ÚÍ╗Îxú¼▓╗┐╔©³©─íúÊ‗×ÚÊ╗éÇÝù─┐Íð╦¨ËðPID╣▓Ë├Ê╗éÇÍðöÓ│╠ð‗ú¼╦³Á─├¹ÎÍ▓╗ò■▒╗╚╬║╬ð┬Á─PID╦¨©³©─íú2. PID¤‗?q¿▒)ºÍðöÓË├Á─╩ÃSMB34¿òrÍðöÓú¼È┌Ë├æ¶╩╣Ë├┴╦PID¤‗?q¿▒)º║¾ú¼ÎóÊÔÈ┌ãõ╦³¥Ä│╠òr▓╗ʬÈ┘Ë├┤╦ÍðöÓú¼Ê▓▓╗ʬ¤‗SMB34Íðîæ╚Ùð┬Á─öÁ(sh¿┤)ÍÁú¼À±ätPIDîó═úÍ╣╣ñθíú3. ┤╦╠Ä┐╔ÊÈ▀xô±╠Ý╝ËPID ╩ÍäË┐ÏÍã─ú╩¢íúÈ┌PID╩ÍäË┐ÏÍã─ú╩¢¤┬ú¼╗Ï┬À¦ö│÷Ë╔╩Íä˦ö│÷ÈO(sh¿¿)¿┐ÏÍãú¼┤╦òrðÞʬîæ╚Ù╩ÍäË┐ÏÍã¦ö│÷àóöÁ(sh¿┤)Ê╗éÇ0.0ú¡1.0Á─îìöÁ(sh¿┤)ú¼┤·▒ݦö│÷Á─0úÑú¡100úÑ°▓╗╩ÃÍ▒¢Ë╚Ñ©─Îâ¦ö│÷ÍÁíúPID┐ÏÍãÁ─ÎÈäË/╩ÍäËÍ«ÚgÁ─ƒoö_äËÃðôQ
8.ͩ¿PID▀\╦ÒöÁ(sh¿┤)ô■(j¿┤)┤µâªà^(q¿▒)
êD12. ÀÍ┼õ▀\╦ÒöÁ(sh¿┤)ô■(j¿┤)┤µâªà^(q¿▒)
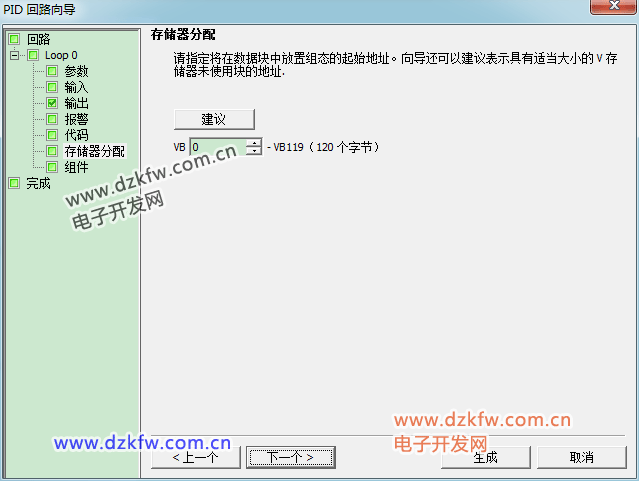
PIDÍ©┴¯ú¿╣ª─▄ëKú®╩╣Ë├┴╦Ê╗éÇ120éÇÎÍ╣Ø(ji¿ª)Á─Và^(q¿▒)àóöÁ(sh¿┤)▒ÝüÝ▀Mðð┐ÏÍã╗Ï┬ÀÁ─▀\╦Ò╣ñθú╗│²┤╦Í«═Ôú¼PID¤‗?q¿▒)º╔·│╔Á─¦ö╚?¦ö│÷┴┐Á─ÿ╦(bi¿ío)£╩(zh¿│n)╗»│╠ð‗Ê▓ðÞʬ▀\╦ÒöÁ(sh¿┤)ô■(j¿┤)┤µâªà^(q¿▒)íúðÞʬ×Ú╦³éâ¿┴xÊ╗éÇã╩╝ÁÏÍÀú¼Ê¬▒úÎCÈôÁÏÍÀã╩╝Á─╚¶©╔ÎÍ╣Ø(ji¿ª)È┌│╠ð‗Á─ãõ╦³ÁÏÀ¢?j¿®ng)]Ëð▒╗ÍÏÅ═(f¿┤)╩╣Ë├íú╚þ╣¹³cô¶'¢¿Îh'ú¼ät¤‗?q¿▒)ºîóÎÈäË×Ú─ÒÈO(sh¿¿)¿«ö(d¿íng)Ã░│╠ð‗Íðø]ËðË├▀^Á─Và^(q¿▒)ÁÏÍÀíú
ÎÈäËÀÍ┼õÁ─ÁÏÍÀÍ╗╩ÃÈ┌ê╠(zh¿¬)ððPID¤‗?q¿▒)ºòr¥ÄÎgÖz£yÁ¢┐ıÚeÁÏÍÀíú¤‗?q¿▒)ºîóÎÈäË×ÚÈôàóö?sh¿┤)▒ÝÀÍ┼õÀ¹╠û├¹ú¼Ë├æ¶▓╗ʬÈ┘ÎÈ╝║×Ú▀@ð®àóöÁ(sh¿┤)ÀÍ┼õÀ¹╠û├¹ú¼À±ätîóîº(d¿úo)Í┬PID┐ÏÍã▓╗ê╠(zh¿¬)ððíú
9.╔·│╔PIDÎË│╠ð‗íóÍðöÓ│╠ð‗╝░À¹╠û▒ÝÁ╚
Ê╗Á®³cô¶═Û│╔░┤Ôoú¼îóÈ┌─ÒÁ─Ýù─┐Íð╔·│╔╔¤╩÷PIDÎË│╠ð‗íóÍðöÓ│╠ð‗╝░À¹╠û▒ÝÁ╚íú
êD13. ╔·│╔PIDÎË│╠ð‗íóÍðöÓ│╠ð‗║═À¹╠û▒ÝÁ╚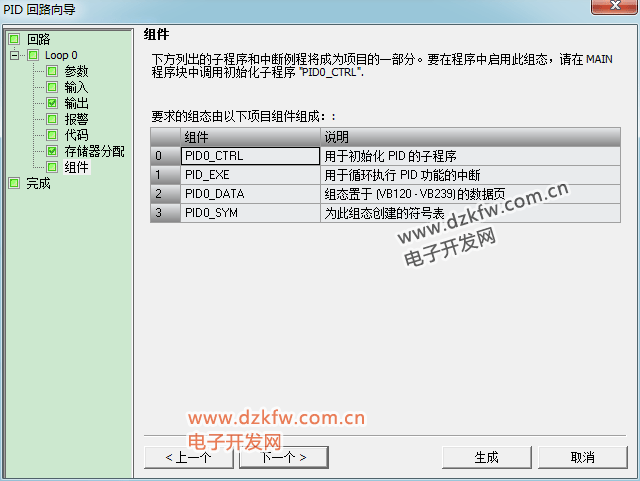
10.┼õÍ├═ÛP(gu¿ín)ID¤‗?q¿▒)ºú¼ðÞʬÈ┌│╠ð‗Íðı{(di¿ño)Ë├¤‗?q¿▒)º╔·│╔Á─PIDÎË│╠ð‗│╠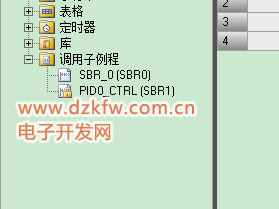
êD14. PIDÎË│╠ð‗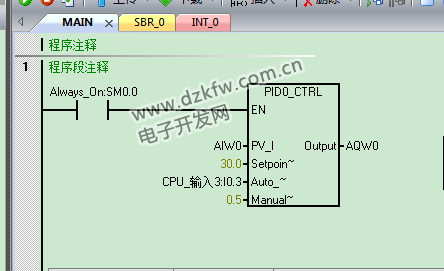
ı{(di¿ño)Ë├PIDÎË│╠ð‗
È┌Ë├æ¶│╠ð‗Íðı{(di¿ño)Ë├PIDÎË│╠ð‗òrú¼┐╔È┌Í©┴¯ÿõÁ─│╠ð‗ëKÍðË├╩¾ÿ╦(bi¿ío)Ùpô¶Ë╔¤‗?q¿▒)º╔·│╔Á─PIDÎË│╠ð‗ú¼È┌¥Í▓┐Îâ┴┐▒ÝÍðú¼┐╔ÊÈ┐┤Á¢ËðÛP(gu¿ín)ð╬╩¢àóöÁ(sh¿┤)Á─¢Ôßî║═╚íÍÁÀÂç·íú
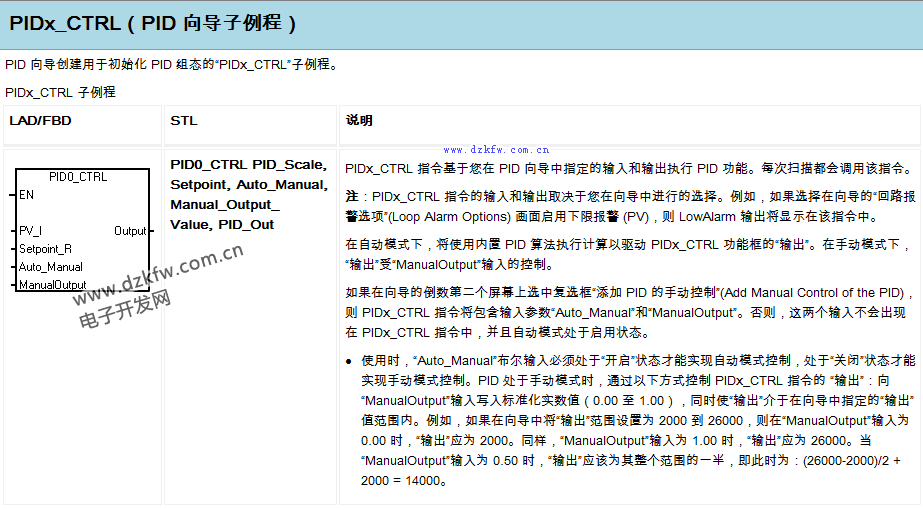
1. ▒ÏÝÜË├SM0.0üÝ╩╣─▄ PIDx_CTRL ÎË│╠ð‗ú¼SM0.0 ║¾▓╗─▄┤«┬ô(li¿ón)╚╬║╬ãõ╦¹ùl╝■ú¼Â°ÃÊÊ▓▓╗─▄ËðÈ¢▀^╦³Á─╠°ÌD(zhu¿ún)ú╗╚þ╣¹È┌ÎË│╠ð‗Íðı{(di¿ño)Ë├ PIDx_CTRL ÎË│╠ð‗ú¼ätı{(di¿ño)Ë├╦³Á─ÎË│╠ð‗Ê▓▒ÏÝÜâH╩╣Ë├ SM0.0 ı{(di¿ño)Ë├ú¼ÊÈ▒úÎC╦³Á─ı²│ú▀\ðð2. ┤╦╠Ħö╚Ù▀^│╠ÍÁú¿À┤üú®Á──úöM┴┐¦ö╚ÙÁÏÍÀ3. ┤╦╠Ħö╚ÙÈO(sh¿¿)¿ÍÁÎâ┴┐ÁÏÍÀú¿VDxxú®ú¼╗‗ı▀Í▒¢Ë¦ö╚ÙÈO(sh¿¿)¿ÍÁ│úöÁ(sh¿┤)ú¼©¨ô■(j¿┤)¤‗?q¿▒)ºÍðÁ─ÈO(sh¿¿)¿0.0ú¡100.0ú¼┤╦╠Äæ¬(y¿®ng)¦ö╚ÙÊ╗éÇ0.0ú¡100.0Á─îìöÁ(sh¿┤)ú¼└²ú║╚¶¦ö╚Ù20ú¼╝┤×Ú▀^│╠ÍÁÁ─20úÑú¼╝┘ÈO(sh¿¿)▀^│╠ÍÁA(ch¿│)IW0╩Ã┴┐│╠×Ú0ú¡200Â╚Á─£ÏÂ╚ÍÁú¼ät┤╦╠ÄÁ─ÈO(sh¿¿)¿ÍÁ20┤·▒Ý40Â╚ú¿╝┤200Â╚Á─20úÑú®ú╗╚þ╣¹È┌¤‗?q¿▒)ºÍðÈO(sh¿¿)¿¢o¿ÀÂç·×Ú0.0 - 200.0ú¼ät┤╦╠ÄÁ─20¤Ó«ö(d¿íng)Ë┌20Â╚
4. ┤╦╠ÄË├I0.0┐ÏÍãPIDÁ─╩Í/ÎÈäËÀ¢╩¢ú¼«ö(d¿íng)I0.0×Ú1òrú¼×ÚÎÈäËú¼¢ø(j¿®ng)▀^PID▀\╦ÒÅ─AQW0¦ö│÷ú╗«ö(d¿íng)I0.0×Ú0òrú¼PIDîó═úÍ╣Ëï╦Òú¼AQW0¦ö│÷×ÚManualOutputú¿VD4ú®ÍðÁ─ÈO(sh¿¿)¿ÍÁú¼┤╦òr▓╗ʬ┴Ý═Ô¥Ä│╠╗‗Í▒¢Ë¢oAQW0┘xÍÁíú╚¶È┌¤‗?q¿▒)ºÍðø]Ëð▀xô±PID╩ÍäË╣ª─▄ú¼ät┤╦Ýù▓╗ò■│÷¼F(xi¿ñn)
5. ¿┴xPID╩ÍäËá¯æB(t¿ñi)¤┬Á─¦ö│÷ú¼Å─AQW0¦ö│÷Ê╗éÇØMÍÁÀÂç·â╚(n¿¿i)îªæ¬(y¿®ng)┤╦ÍÁÁ─¦ö│÷┴┐íú┤╦╠Ä┐╔¦ö╚Ù╩ÍäËÈO(sh¿¿)¿ÍÁÁ─Îâ┴┐ÁÏÍÀú¿VDxxú®ú¼╗‗Í▒¢Ë¦ö╚ÙöÁ(sh¿┤)íúöÁ(sh¿┤)ÍÁÀÂç·×Ú0.0-1.0Í«ÚgÁ─Ê╗éÇîìöÁ(sh¿┤)ú¼┤·▒ݦö│÷ÀÂç·Á─░┘ÀÍ▒╚íú└²ú║╚þ¦ö╚Ù0.5ú¼ätÈO(sh¿¿)¿×Ú¦ö│÷Á─50úÑíú╚¶È┌¤‗?q¿▒)ºÍðø]Ëð▀xô±PID╩ÍäË╣ª─▄ú¼ät┤╦Ýù▓╗ò■│÷¼F(xi¿ñn)
6. ┤╦╠ĵI╚Ù┐ÏÍã┴┐Á─¦ö│÷ÁÏÍÀ7. «ö(d¿íng)©▀ê¾¥»ùl╝■ØMÎÒòrú¼¤Óæ¬(y¿®ng)Á─¦ö│÷Í├╬╗×Ú1ú¼╚¶È┌¤‗?q¿▒)ºÍðø]Ëð╩╣─▄©▀ê¾¥»╣ª─▄ú¼ät┤╦Ýùîó▓╗ò■│÷¼F(xi¿ñn)8. «ö(d¿íng)?sh¿┤)═ê¾¥»ùl╝■ØMÎÒòrú¼¤Óæ¬(y¿®ng)Á─¦ö│÷Í├╬╗×Ú1ú¼╚¶È┌¤‗?q¿▒)ºÍðø]Ëð╩╣─▄Á═ê¾¥»╣ª─▄ú¼ät┤╦Ýùîó▓╗ò■│÷¼F(xi¿ñn)9. «ö(d¿íng)─úëK│÷Õeòrú¼¤Óæ¬(y¿®ng)Á─¦ö│÷Í├╬╗×Ú1ú¼╚¶È┌¤‗?q¿▒)ºÍðø]Ëð╩╣─▄─úëKÕeı`ê¾¥»╣ª─▄ú¼ät┤╦Ýùîó▓╗ò■│÷¼F(xi¿ñn)ı{(di¿ño)Ë├PIDÎË│╠ð‗òrú¼▓╗Ë├┐╝æ]ÍðöÓ│╠ð‗íúÎË│╠ð‗ò■ÎÈäË│§╩╝╗»¤ÓÛP(gu¿ín)Á─¿òrÍðöÓ╠Ä└Ý╩┬Ýùú¼╚╗║¾ÍðöÓ│╠ð‗ò■ÎÈäËê╠(zh¿¬)ððíú
11.îìÙH▀\ðð▓óı{(di¿ño)ÈçPIDàóöÁ(sh¿┤)
ø]ËðÊ╗éÇPIDÝù─┐Á─àóöÁ(sh¿┤)▓╗ðÞʬðÌ©─°─▄Í▒¢Ë▀\ððú¼Ê‗┤╦ðÞʬÈ┌îìÙH▀\ððòrı{(di¿ño)ÈçPIDàóöÁ(sh¿┤)íú
▓Ú┐┤öÁ(sh¿┤)ô■(j¿┤)ëKÊÈ╝░À¹╠û▒ݤÓæ¬(y¿®ng)Á─PIDÀ¹╠ûÿ╦(bi¿ío)║×Á─â╚(n¿¿i)╚¦ú¼┐╔ÊÈıÊÁ¢░³└¿PID║╦ð─Í©┴¯╦¨Ë├Á─┐ÏÍã╗Ï┬À▒Ýú¼░³└¿▒╚└²¤ÁöÁ(sh¿┤)íóÀeÀÍòrÚgÁ╚Á╚íúîó┤╦▒ÝÁ─ÁÏÍÀÅ═(f¿┤)ÍãÁ¢á¯æB(t¿ñi)▒ÝÍðú¼┐╔ÊÈÈ┌▒O(ji¿ín)┐Ï─ú╩¢¤┬È┌¥ÇðÌ©─PIDàóöÁ(sh¿┤)ú¼Â°▓╗▒Ï═úÖCÈ┘┤╬Î÷┼õÍ├íú
àóöÁ(sh¿┤)ı{(di¿ño)Èç║¤▀m║¾ú¼Ë├æ¶┐╔ÊÈÈ┌öÁ(sh¿┤)ô■(j¿┤)ëKÍðîæ╚Ùú¼Ê▓┐╔ÊÈÈ┘Î÷Ê╗┤╬¤‗?q¿▒)ºú¼╗‗ı▀¥Ä│╠¤‗¤Óæ?y¿®ng)Á─öÁ(sh¿┤)ô■(j¿┤)à^(q¿▒)é¸╦═àóöÁ(sh¿┤)íú
03PID¢MæB(t¿ñi)ÈO(sh¿¿)Í├Íð│úåûåû¯}
Î÷═ÛP(gu¿ín)ID¤‗?q¿▒)º║¾ú¼╚þ║╬ͬÁ└¤‗î(q¿▒)ºÍðÈO(sh¿¿)¿ÍÁú¼▀^│╠ÍÁ╝░PIDÁ╚àóöÁ(sh¿┤)╦¨Ë├Á─ÁÏÍÀú┐
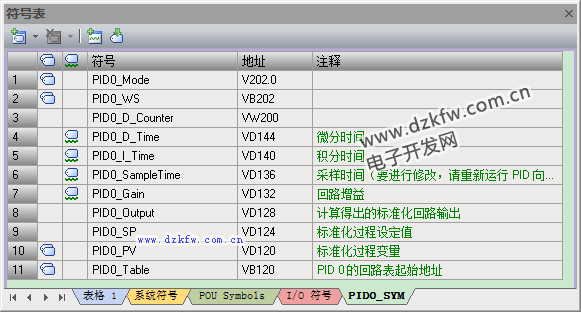
Î÷═ÛP(gu¿ín)ID¤‗?q¿▒)º║¾┐╔È┌À¹╠û▒ÝÍðú¼▓Ú┐┤PID¤‗?q¿▒)º╦¨╔·│╔Á─À¹╠û▒?╔¤└²Íð×ÚPID0_SYM)ú¼┐╔┐┤Á¢©¸àóöÁ(sh¿┤)╦¨Ë├Á─Èö╝ÜÁÏÍÀú¼╝░öÁ(sh¿┤)ÍÁÀÂç·íúÈ┌öÁ(sh¿┤)ô■(j¿┤)ëKÍðú¼▓Ú┐┤PIDÍ©┴¯╗Ï┬À▒ÝÁ─¤ÓÛP(gu¿ín)àóöÁ(sh¿┤)íú╚þêD╦¨╩¥ú║
1. Î÷═ÛP(gu¿ín)ID¤‗?q¿▒)º║¾ú¼╚þ║╬È┌ı{(di¿ño)ÈçÍððÌ©─PIDàóöÁ(sh¿┤)ú┐┤ú║┐╔ÊÈÈ┌á¯æB(t¿ñi)▒ÝÍðú¼¦ö╚Ù¤Óæ¬(y¿®ng)Á─àóöÁ(sh¿┤)ÁÏÍÀú¼╚╗║¾È┌¥Çîæ╚ÙË├æ¶ðÞʬÁ─PIDàóöÁ(sh¿┤)öÁ(sh¿┤)ÍÁú¼▀@ÿËË├涥═┐╔©¨ô■(j¿┤)╣ñ╦çðÞʬÙSòrîªPIDàóöÁ(sh¿┤)íóÈO(sh¿¿)¿ÍÁÁ╚▀Mððı{(di¿ño)ı¹íú
2.PIDÊТø(j¿®ng)ı{(di¿ño)ı¹║¤▀mú¼╚þ║╬ı²╩¢┤_¿àóöÁ(sh¿┤)ú┐┤ú║┐╔ÊÈÈ┌öÁ(sh¿┤)ô■(j¿┤)ëKÍðÍ▒¢Ëîæ╚Ù?y¿▓n)óö?sh¿┤)íú
3.Î÷═ÛP(gu¿ín)ID¤‗?q¿▒)º║¾ú¼─▄À±▓Ú┐┤PID╔·│╔Á─ÎË│╠ð‗ú¼ÍðöÓ│╠ð‗ú┐ ┤ú║PID¤‗?q¿▒)º╔·│╔Á─ÎË│╠ð‗ú¼ÍðöÓ│╠ð‗Ë├æ¶╩ÃoÀ¿┐┤Á¢Á─ú¼Ê▓▓╗─▄îªãõ▀MðððÌ©─íúø]Ëð├▄┤a─▄ë‗┤‗Ú_▀@ð®ÎË│╠ð‗ú¼Ê╗░ÒÁ─æ¬(y¿®ng)Ë├Ê▓ø]Ëð▒Ïʬ┤‗Ú_▓Ú┐┤íú
4.PIDàóöÁ(sh¿┤)Ëð¢ø(j¿®ng)‗×ÍÁåßú┐ ┤ú║├┐Ê╗éÇÝù─┐Á─PID àóöÁ(sh¿┤)Â╝▓╗Ê╗ÿËú¼ø]Ëð¢ø(j¿®ng)‗×àóöÁ(sh¿┤)ú¼Í╗─▄¼F(xi¿ñn)ê÷ı{(di¿ño)Èç½@Á├íú
5.╬ÊÁ─PID¤‗?q¿▒)º╔·│╔Á─│╠ð‗×Ú║╬▓╗ê?zh¿¬)ððú┐┤ú║▒ÏÝÜ▒úÎCË├SM0.0ƒoùl╝■ı{(di¿ño)Ë├PID0_CTRL│╠ð‗È┌│╠ð‗Á─ãõ╦³▓┐ÀÍ▓╗ʬÈ┘╩╣Ë├SMB34¿òrÍðöÓú¼Ê▓▓╗ʬîªSMB34┘xÍÁ
6.╚þ║╬îì¼F(xi¿ñn)PIDÀ┤θË├ı{(di¿ño)╣Ø(ji¿ª)ú┐┤ú║È┌Ëðð®┐ÏÍãÍððÞʬPIDÀ┤θË├ı{(di¿ño)╣Ø(ji¿ª)íú└²╚þú║È┌¤─╠ý┐ÏÍã┐ıı{(di¿ño)Íã└õòrú¼╚¶À┤ü£ÏÂ╚ú¿▀^│╠ÍÁú®Á═Ë┌ÈO(sh¿¿)¿£ÏÂ╚ú¼ðÞʬÛP(gu¿ín)Úyú¼£pðí¦ö│÷┐ÏÍãú¿£p╔┘└õ╦«┴¸┴┐Á╚ú®ú¼▀@¥═╩ÃPIDÀ┤θË├ı{(di¿ño)╣Ø(ji¿ª)ú¿È┌PIDı²Î¸Ë├Íð╚¶▀^│╠ÍÁðíË┌ÈO(sh¿¿)¿ÍÁú¼ätðÞʬÈ÷┤¾¦ö│÷┐ÏÍãú®íú╚¶¤Ùîì¼F(xi¿ñn)PIDÀ┤θË├ı{(di¿ño)╣Ø(ji¿ª)ú¼ðÞʬ░ÐPID╗Ï┬ÀÁ─È÷ʵÈO(sh¿¿)×ÚÏôöÁ(sh¿┤)íúîªË┌È÷ʵ×Ú0Á─ÀeÀÍ╗‗╬óÀÍ┐ÏÍãüÝıfú¼╚þ╣¹Í©Â¿ÀeÀÍòrÚgíó╬óÀÍòrÚg×ÚÏôÍÁú¼ät╩ÃÀ┤θË├╗Ï┬Àíú
7.╚þ║╬©¨ô■(j¿┤)╣ñ╦çʬþËð▀xô±ÁÏ═Â╚ÙPID╣ª─▄ú┐┤ú║┐╔╩╣Ë├'╩ÍäË/ÎÈäË'ÃðôQÁ─╣ª─▄íúPID¤‗?q¿▒)º╔·│╔Á─PID╣ª─▄ëKÍ╗─▄╩╣Ë├SM0.0Á─ùl╝■ı{(di¿ño)Ë├íú
RECOMMEND
 ÀÁ╗ÏÝö▓┐
ÀÁ╗ÏÝö▓┐ ╦óð┬Ýô├µ
╦óð┬Ýô├µ ¤┬Á¢ÝôÁÎ
¤┬Á¢ÝôÁÎ