
運動控制在工控領域是十分常見的,我們經常用到的運動控制的電機主要分兩大類,一種是伺服電機控制,還有一種是步進電機控制。
本文主要講解的是伺服電機的位置控制模式。伺服電機的控制模式分三種:1、位置控制模式,2、速度控制模式、3、扭矩控制模式。其中后兩種模式都比較簡單,應用起來也非常的簡單。所以我本次講解的是比較麻煩的位置控制。
根據控制方式來說我了解的的控制方式也是大體的分兩種:
一、 基于PLC的運動控制主要分兩大部分:1、PLC,功能是發送運動的脈沖數,充當運動控制的發號施令者,伺服電機運動到什么位置,全靠PLC發送的脈沖數來決定。2、伺服電機和伺服驅動器,伺服驅動器和伺服電機配套為運動控制的執行機構,根據接收到的脈沖數和方向運動相應的距離
二、基于運動控制卡的運動控制方式也是分兩大部分:1、運動控制卡,功能是和PLC一樣的,充當運動控制的發號施令者,伺服電機運動到什么位置,全靠運動控制卡發送的脈沖數來決定。2、伺服電機和伺服驅動器,伺服驅動器和伺服電機配套為運動控制的執行機構,根據接收到的脈沖數和方向運動相應的距離。
我對運控控制卡的研究比較少,但是根據我個人的看法,運動控制卡主要是集成了硬件和軟件,他們相比于PLC更容易控制多軸的控制,一般運動控制卡的廠家都已經編寫好的函數,我們只需要根據函數的功能去調用就好了。本文主要是講解PLC和伺服驅動搭建的運動控制。
首先我們了解一下伺服驅動器的接線,了解一下運動控制都需要哪些信號。
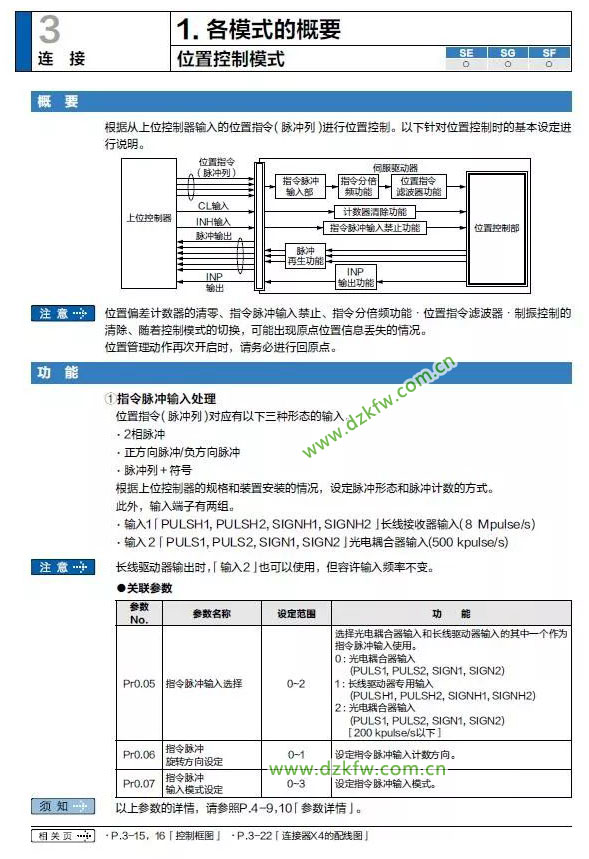
松下說明書的位置控制
這里主要是寫了位置控制下的關鍵參數,這些要注意一下關鍵參數,參數不一樣接線方式也要跟著變換。
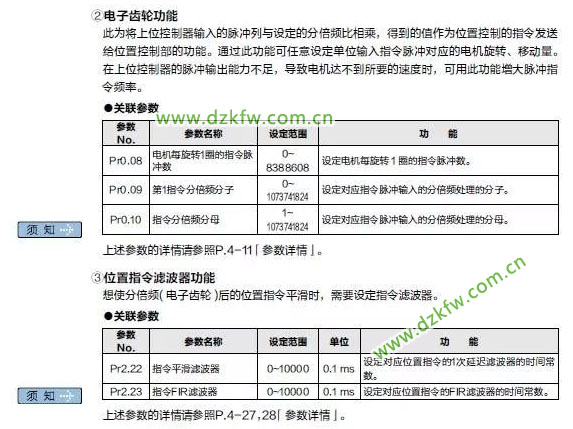
pr008,電機轉一圈所需要的脈沖數
這里設置的PR0.08說的是伺服驅動器轉一圈,PLC或者運動控制卡發送多少個脈沖,伺服驅動器控制伺服電機轉一圈。這個參數很重要,這個參數要和PLC上的組態程序要對應好,不然控制會出現偏差。不同的驅動器品牌的主要參數都差不多,這個要根據具體的說明書來設置。
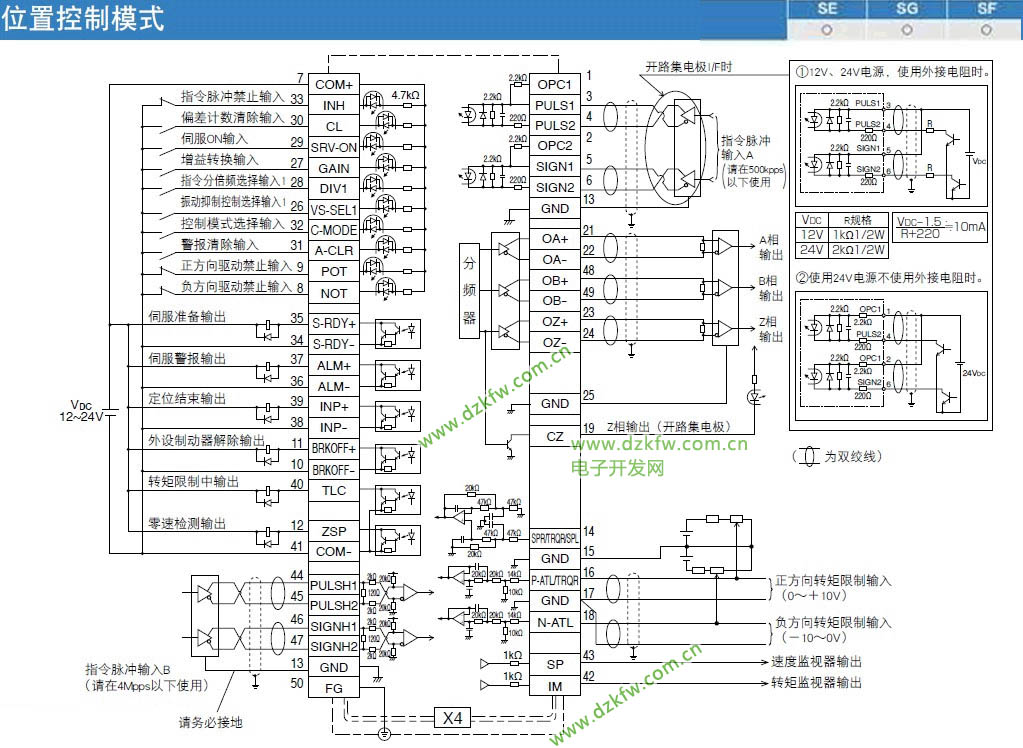
驅動電機的接線
這里主要說的幾個IO,脈沖、伺服使能、剎車、還有兩個正負極限。這是一個基本的運動控制需要的接線。也就是說在PLC端我們需要這么多個輸出給伺服驅動器,正負極限可以不需要PLC輸出,直接接的限位開關就好。
伺服驅動器這邊基本接線和主要參數設置就這么多,接下來我們可以看一下西門子PLC上要如何組態來配置相應的控制程序。大概的了解一下運動控制的工作原理。在下一節我才將到怎么在PLC上編程去控制電機的運動。
西門子smart 200的編程軟件STEP 7-MicroWIN SMART點擊向導,它會帶著你配置運控控制所需要的參數,簡化編程。
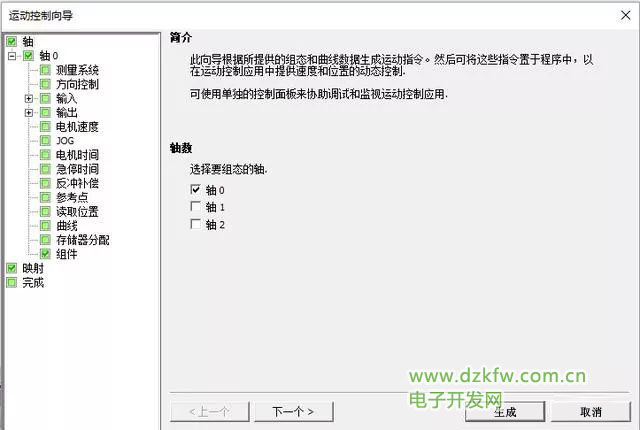
1、 在向導中點擊運動,彈出運動的向導。

2、選擇要組態的軸,根據PLC的型號不一樣,一個PLC能控制的軸的數量也不一樣,我這里能組態三個軸,代表這個PLC最多能同時控制三個伺服電機。
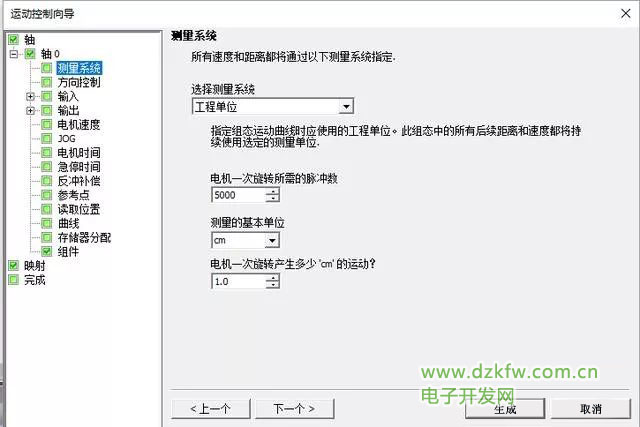
3、選擇測量系統,這里電機轉一次需要的脈沖數要和伺服電機的上設置的脈沖數要一致。
電機轉一次產生多少位移這個就要看你的運動控制系統的絲杠或者伺服缸的導程,比如與導程是10的伺服缸,那么電機轉一次就移動1cm,這個看實際的情況而定。
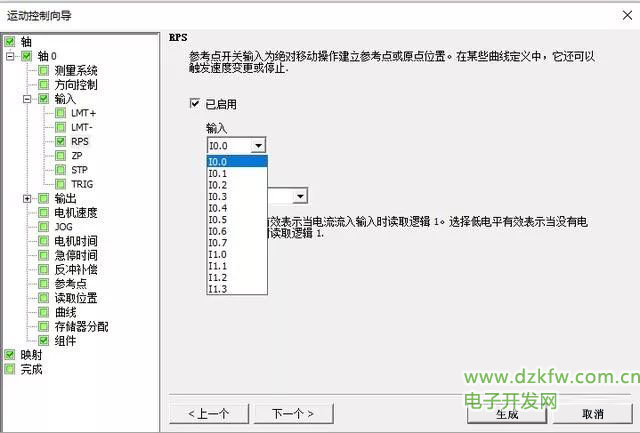
4、輸入配置,這里主要是三個參數要配置,上極限和下極限,這是判斷運動控制的極限位置,還有就是參考點(我們常說的零點)。這三個可以自由搭配輸入點,我建議一個系統最少是需要三個限位開關,一個是上極限,一個是下極限,還有一個就是原點。但是運動控制最少只需要一個點就可以實現位置控制,那就是原點。但是這樣會出現跑出極限的危險。最完善的運動控制應該是有五個,兩個上極限,兩個下極限外加一個原點。兩個上極限一個接PLC一個接伺服驅動器,兩個下極限一個接PLC一個接伺服驅動器,還有最后一個原點接PLC。但是這樣會增加成本,所以我們一個用三個限位開關就夠了
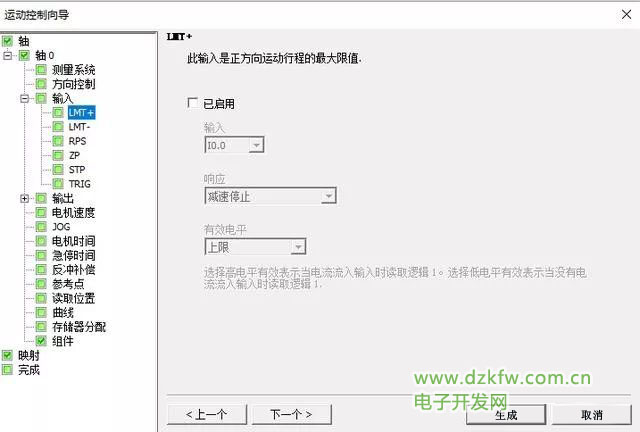
5、配置限位開關的點位和輸入信號。
6、方向輸出,這個是控制方向輸出控制的。

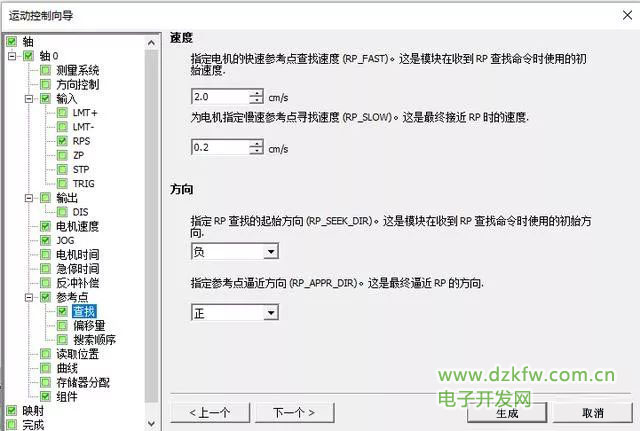
7、參考點的配置,配置回歸原點的速度和原點信號
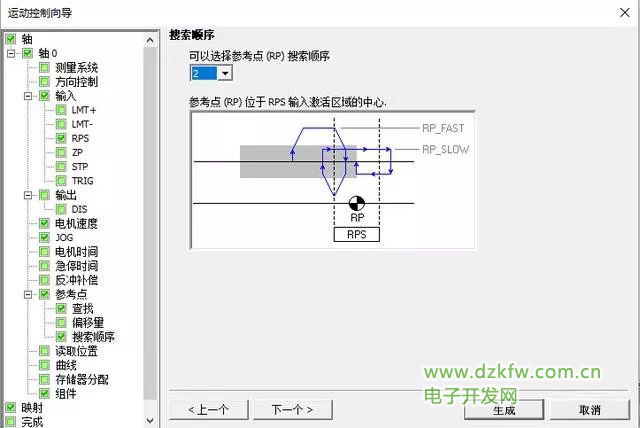
9、搜索原點的方式
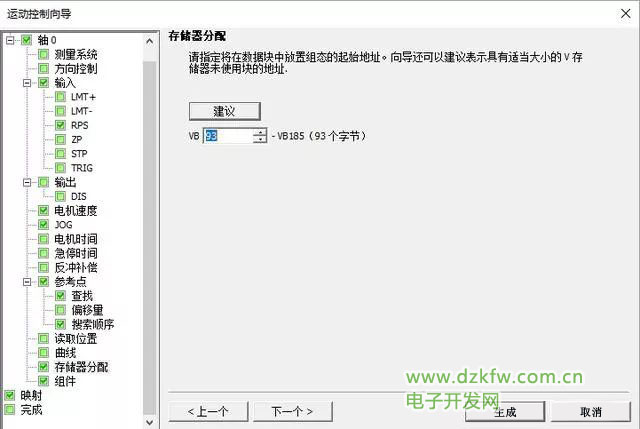
10、儲存器的分配
11、配置完成的結果

現在總結一下一個運動控制系統主要需要哪幾個參數:1、控制系統的導程。2、伺服電機轉一圈需要的脈沖數(PLC和伺服驅動器上的參數設置要一致)。3、原點限位開關。4、上極限開關。5、下極限開關。
在我們調試之前一定要確定這么幾個參數才能夠做到位置控制,下一篇文章我才會將PLC的幾個運動控制指令。
留言處大家可以補充文章解釋不對或欠缺的部分,這樣下一個看到的人會學到更多,你知道的正是大家需要的。。。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底