
Ż©2Ż® HMI╔Ž─▄ėą╩ųäėĪóūįäė┐žųŲ«ŗ├µŻ╗▓ó─▄’@╩Šł¾Š»Š▀¾wą┼Žó
Ż©3Ż® HMI╔Ž─▄’@╩Š«öŪ░╬╗ų├Īó─┐ś╦╬╗ų├Īó«öŪ░╦┘Č╚Īó─┐ś╦╦┘Č╚Ą─’@╩Š
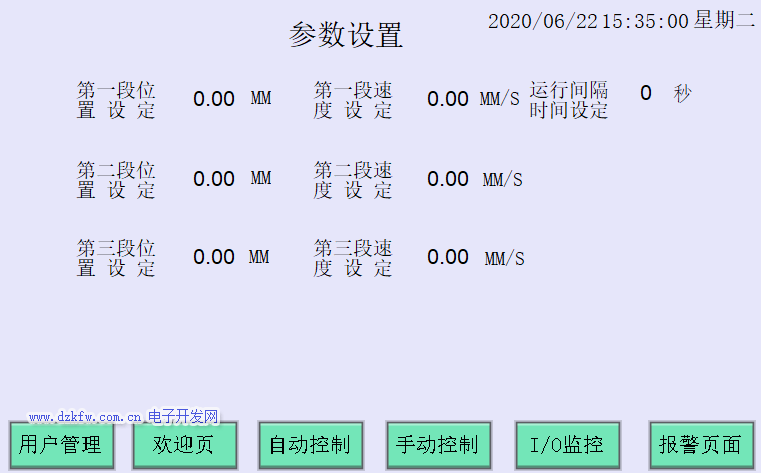
Ż©4Ż® HMI╔Ž─▄įOų├Ė„Č╬╬╗ų├║═╦┘Č╚
Ż©5Ż® «öį┌╩ųäė─Ż╩ĮĢrŻ¼ūįäė─Ż╩Į▓╗─▄▀\ąąŻ¼ā╔ĘN─Ż╩ĮąĶ╗źµi
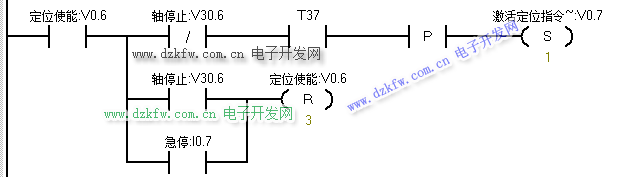
Ż©6Ż® ę¬Ū¾├┐┤╬åóäėĢrŠ∙į┌A ╬╗ų├ķ_╩╝▀\ąąŻ¼į┌ø]ėą░┤Ž┬═Żų╣░┤ŌoĢrŻ¼æ¬į┌ABC╚²³c裣h▀\ąąŻ¼┐╔ļSęŌĖ³Ė─╚²³c╬╗ų├ųĄ╝░▀\ąą╦┘Č╚
Ż©7Ż® «ö░┤Ž┬═Żų╣░┤ŌoĢrŻ¼▓╗─▄┴ó╝┤═Żų╣Ż¼æ¬▀\ąą═ĻįōČ╬╬╗ų├▓┼─▄═Żų╣
Ż©8Ż® «ö░┤Ž┬╝▒═Ż░┤ŌoĢrŻ¼ļŖÖCæ¬┴ó╝┤═Żų╣
▒Š└²ūė▓╔ė├200SMART ST20 CPUŻ¼į┌┐┤▒Š░Ė└²ĢrąĶę¬ėąę╗Č©Ą─Č©╬╗╗∙ĄAų¬ūRŻ¼─▄ē“ŪÕ│■▓Į▀MļŖÖC╩Ū╚ń║╬▀Mąą┐žųŲĄ─Ż¼╩Ūį§├┤╚źīŹ¼FĖ─ūā▀\ąąĘĮŽ“▓ó┴╦ĮŌ▀\äė┐žųŲŽ“ī¦▓┘ū„ŻĪ
Č■Īó░Ė└²ĮķĮBŻ║Ž┬łD╩ŪļŖÖCĄ─╩ŠęŌłD;I0.2×ķš²Ž▐╬╗ I0.3×ķįŁ³cą┼╠¢I0.4×ķžōŽ▐╬╗
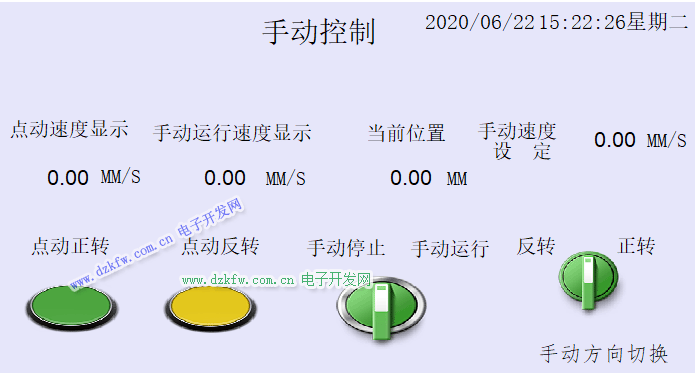
HMI╩ųäė┐žųŲ«ŗ├µ’@╩Š«öŪ░╬╗ų├Īó³cäė╦┘Č╚Īó╩ųäė▀\ąą╦┘Č╚╝░įOų├╩ųäė▀\ąą╦┘Č╚
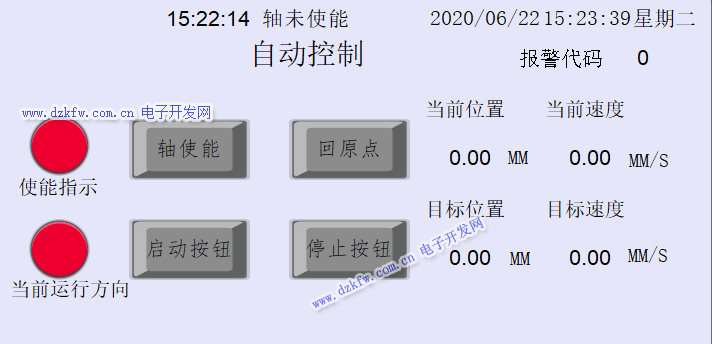
ūįäė┐žųŲ«ŗ├µ ’@╩Š«öŪ░╬╗ų├║═╦┘Č╚Ż¼─┐ś╦╬╗ų├║═╦┘Č╚Ż¼╩╣─▄ųĖ╩ŠĄ╚
ģóöĄįOų├«ŗ├µ┐╔įOų├Ė„Č╬╦┘Č╚║═╬╗ų├
Ųõ╦¹«ŗ├µ▓╗ę╗ę╗š╣╩Š
░┤Ōo║═plcį§śėĻP┬ōšł▓ķ┐┤ęįŽ┬Į╠│╠:
1Īówww.zhimadaxue.com/Article/HMI/8008.html
└źü÷═©æB▀BĮė╬„ķTūėplc_└źü÷═©æBė|├■Ų┴║═s7-200 smartęį╠½ŠW═©ėŹĄ─═©ėŹ
2Īówww.zhimadaxue.com/Article/Kingview/10004.html
KingViewĮMæB═§┼cS7-200 SMART═©▀^ŠW┐┌▀BĮė TCP═©ėŹ
Ž┬├µ╬ęéāķ_╩╝īæ│╠ą“Ż¼╩ūŽ╚æ¬įō╩Ū▌S╩╣─▄ęį╝░│§╩╝╗»│╠ą“Ż¼Ą½į┌ŠÄīæ│§╩╝╗»│╠ą“ų«Ū░Ż¼╬ęéā┐╝æ]į┌HMIĘĮ▒Ń▀\ąąķgą¬ĢrķgĄ─įOČ©Ż¼ū÷┴╦éĆĢrķgöĄō■Ą─▀\╦Ń│╠ą“
Įėų°╩╣ė├å╬░┤ŌoĄ─ĘĮ╩ĮŠÄīæ▌S╩╣─▄│╠ą“ HMI╝░ė▓╝■░┤ŌoŠ∙┐╔╩╣─▄
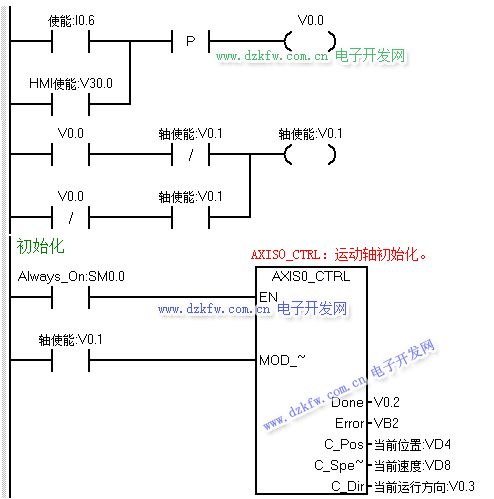
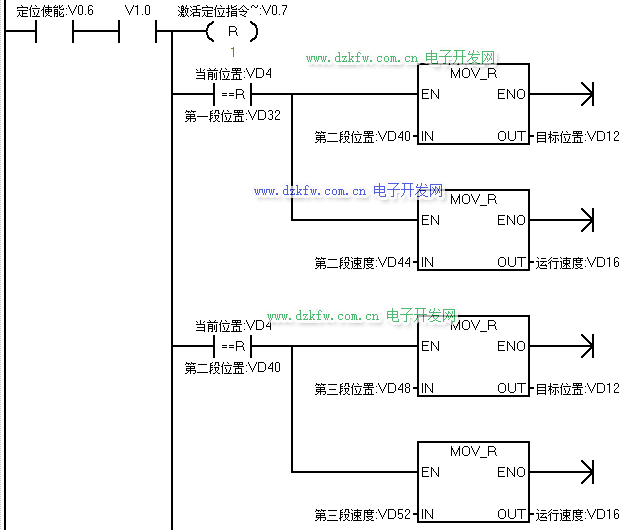
Ųõ┤╬╬ęéāĮėų°ŠÄīæ╩ųäė▓┐ĘųĄ─│╠ą“Ż¼╩ųäė▀\ąąš²Ę┤▐DĢrąĶę¬╗źµiŻ¼▓óŪęį┌ūįäė─Ż╩ĮĢr╩ųäė─Ż╩Į▓╗─▄▀\ąąŻ¼╦∙ęįė├Č©╬╗╩╣─▄╝░ūįäė▀\ąąā╔éĆŚlū÷╩ųäė│╠ą“Ą─EN╬╗
«ö³cäėš²▐D╗“Ę┤▐DĢrŻ¼╬ęéā░č«öŪ░╦┘Č╚é„╦═ų┴HMI╔Ž’@╩Š

ł╠ąą╗žįŁ³c│╠ą“
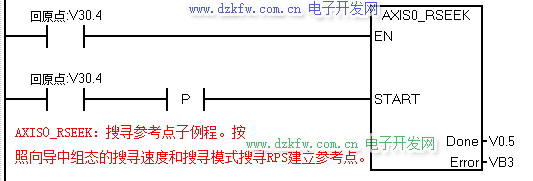
įŁ³c═Ļ│╔║¾░čĄ┌ę╗A³cĄ─╬╗ų├║═╦┘Č╚é„╦═ų┴─┐ś╦╬╗ų├║═╦┘Č╚ųą

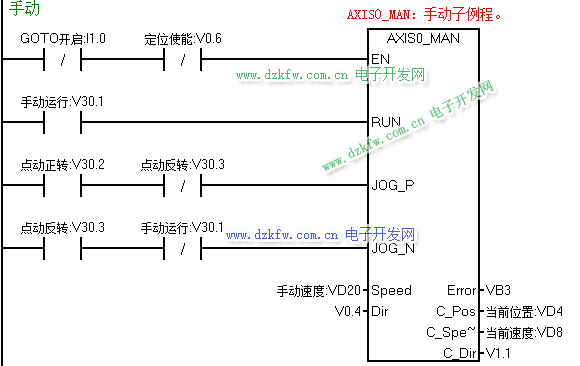
ūŅ║¾╩Ūūįäė▓┐ĘųĄ─│╠ą“Ż¼«öø]ėą╝▒═ŻĄ─ŪķørŽ┬Ż¼░┤Ž┬åóäė░┤Ōo║¾Ż¼ätķ_╩╝ł╠ąąGOTOųĖ┴ŅŻ¼ķ_╩╝▀\ąąę└Ą┌ę╗Č╬╦┘Č╚▀\ąąų┴Ą┌ę╗Č╬╬╗ų├
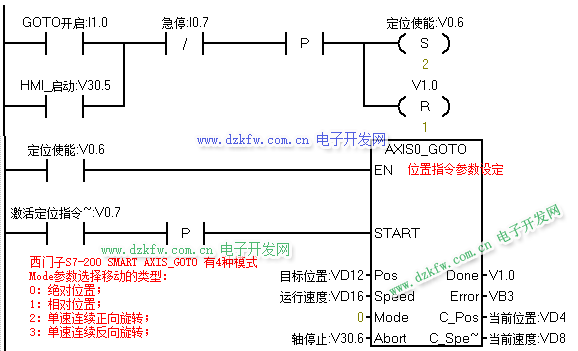
«ö«öŪ░╬╗ų├║═Ą┌ę╗Č╬A³c╬╗ų├ŽÓĄ╚ĢrŻ¼░čB³c╬╗ų├║═╦┘▀fé„╦═ų┴─┐ś╦ųĄĄžųĘā╚Ż¼čėĢrę╗Č©Ģrķg║¾Ż¼▀\ąąų┴B³cŻ¼«öĄĮ▀_B³c║¾░čC³cĄ─╬╗ų├║═╦┘Č╚é„╦═ų┴─┐ś╦╬╗ų├ĄžųĘ
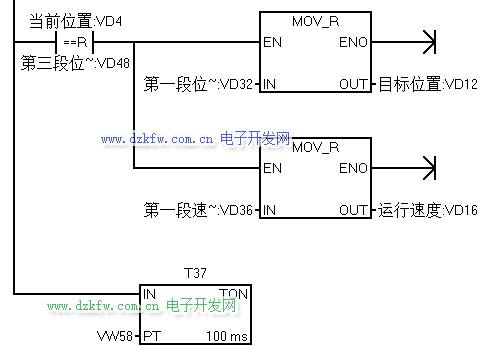
į┌ø]░┤Ž┬═Żų╣ĢrŻ¼į┌ABC╚²╠ÄĘ┤Å═čŁ▀\ąąŻ╗░┤Ž┬═Żų╣░┤Ōo║¾Ż¼ät▓╗į┘▀\ąąŽ┬ę╗Č╬─┐ś╦ųĄŻ╗░┤Ž┬╝▒═Ż░┤ŌoĢrŻ¼ätąĶ┴ó╝┤═Żų╣
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū