
ę╗Īó▓Į▀M“īäėŽĄĮy
▓Į▀M“īäėŽĄĮy░³║¼▓Į▀MļŖäėÖC║═▓Į▀M“īäėŲ„Ż¼Ū░Č╦ė╔PLC░l├}ø_ĪŻ
▓Į▀MļŖÖC╩ŪīóļŖ├}ø_ą┼╠¢▐Dūā×ķĮŪ╬╗ęŲ╗“ŠĆ╬╗ęŲęį┐žųŲ▐Dūė▐DäėĄ─ķ_Łh┐žųŲļŖÖCŻ©┐╔ęį═©▀^░▓čbŠÄ┤aŲ„ą╬│╔ķ]ŁhŽĄĮyŻ®ĪŻ
╦³ą²▐D╩Ūęį╣╠Č©Ą─ĮŪČ╚Ż©▓ĮŠÓĮŪŻ®ę╗▓Įę╗▓Į▀\ąąĄ─Ż¼╣╩ĘQ▓Į▀MļŖÖCĪŻį┌ĘŪ│¼▌dĄ─ŪķørŽ┬Ż¼ļŖÖCĄ─▐D╦┘Īó═Żų╣Ą─╬╗ų├ų╗╚ĪøQė┌├}ø_ą┼╠¢Ą─Ņl┬╩║═├}ø_öĄŻ¼Č°▓╗╩▄žō▌dūā╗»Ą─ė░ĒæŻ¼ę“┤╦Š▀ėą▌^Ė▀Ą─Č©╬╗Š½Č╚ĪŻ
▓Į▀M“īäėŲ„Ż©▓Į▀M“īäėļŖį┤Ż®Ž“ļŖäėÖC└@ĮM╠ß╣®├}ø_ļŖ┴„Ż¼▓Į▀MļŖäėÖCĄ─▀\ąąąį─▄øQČ©ė┌ļŖäėÖC┼c▓Į▀M“īäėŲ„Ą─┴╝║├┼õ║ŽĪŻ
ļŖÖCĄ─Ēææ¬āHė╔öĄūų▌ö╚ļ├}ø_┤_Č©Ż¼ę“Č°┐╔ęį▓╔ė├ķ_Łh┐žųŲŻ¼▀@╩╣Ą├ļŖÖCĄ─ĮYśŗ┐╔ęį▒╚▌^║åå╬Č°Ūę┐žųŲ│╔▒ŠĪŻ
Č■Īó ▓Į▀MļŖÖC╗∙▒ŠįŁ└Ē
▓Į▀MļŖÖC╩Ūę╗ĘNė├ļŖ├}ø_▀Mąą┐žųŲŻ¼īóļŖ├}ø_(öĄūųą┼╠¢)▐D╗»×ķĮŪ╬╗ęŲĄ─ł╠ąąÖCśŗĪŻ
═©│Ż▓Į▀MļŖÖCĄ─▐Dūė×ķė└┤┼¾wŻ¼«öļŖ┴„┴„▀^Č©ūė└@ĮMĢrŻ¼Č©ūė└@ĮM«a╔·ę╗╩Ė┴┐┤┼ł÷ĪŻ
įō┤┼ł÷Ģ■Ħäė▐Dūėą²▐Dę╗ĮŪČ╚Ż¼╩╣Ą├▐DūėĄ─ę╗ī”┤┼ł÷ĘĮŽ“┼cČ©ūėĄ─┤┼ł÷ĘĮŽ“ę╗ų┬ĪŻ«öČ©ūėĄ─╩Ė┴┐┤┼ł÷ą²▐Dę╗éĆĮŪČ╚Ż¼▐Dūėę▓ļSų°įō┤┼ł÷▐Dę╗éĆĮŪČ╚ĪŻ
«ö▓Į▀M“īäėŲ„Įė╩šĄĮę╗éĆ├}ø_ą┼╠¢Ż¼╦³Š═“īäė▓Į▀MļŖÖC░┤įOČ©Ą─ĘĮŽ“▐Däėę╗éĆ╣╠Č©Ą─ĮŪČ╚ (ĘQ×ķ"▓ĮŠÓĮŪ")Ż¼╦³Ą─ą²▐D╩Ūęį╣╠Č©Ą─ĮŪČ╚ę╗▓Įę╗▓Į▀\ąąĄ─ĪŻ
▓Į▀MļŖÖC▌ö│÷Ą─ĮŪ╬╗ęŲ┼c▌ö╚ļĄ─├}ø_öĄ│╔š²▒╚Ż¼▐D╦┘┼c├}ø_Ņl┬╩│╔š²▒╚Ż¼Ė─ūā└@ĮM═©ļŖĄ─Ēśą“Ż¼ļŖÖCŠ═Ģ■Ę┤▐DĪŻę“┤╦Ż║
┐╔ęį═©▀^┐žųŲ├}ø_éĆöĄüĒ┐žųŲĮŪ╬╗ęŲ┴┐Ż¼Å─Č°▀_ĄĮ£╩┤_Č©╬╗Ą──┐Ą─Ż╗
┐╔ęį═©▀^┐žųŲ├}ø_Ņl┬╩üĒ┐žųŲļŖÖC▐DäėĄ─╦┘Č╚║═╝ė╦┘Č╚Ż¼Å─Č°▀_ĄĮš{╦┘Ą──┐Ą─Ż╗
┐╔ęį═©▀^┐žųŲ└@ĮM═©ļŖĒśą“Ż¼▀_ĄĮ┐žųŲļŖÖCš²Ę┤▐DĄ──┐Ą─ĪŻ
╚²Īó▓Į▀MļŖÖCĄ─ų„ę¬ģóöĄ┼c╝╝ągųĖś╦
▓Į▀MļŖÖCų„ę¬ģóöĄ░³└©Ż║Ņ~Č©ļŖē║ĪóŅ~Č©ļŖ┴„ĪóŽÓöĄĪó▓ĮŠÓĮŪĪó▓ĮŠÓĮŪš`▓ŅĪóūŅ┤¾ņo▐DŠžĪó┐š▌dŲäėŅl┬╩ĪóūŅĖ▀▀\ąąŅl┬╩Ą╚ĪŻ
3.1 ŽÓöĄ
╩ŪųĖļŖÖCā╚▓┐Ą─ŠĆ╚”ĮMöĄŻ¼─┐Ū░│Żė├Ą─ėąā╔ŽÓĪó╚²ŽÓĪó╬ÕŽÓ▓Į▀MļŖÖCĪŻ
3.2 ┼─öĄ
═Ļ│╔ę╗éĆ┤┼ł÷ų▄Ų┌ąįūā╗»┐sąĶ├}ø_öĄ╗“ī¦ļŖĀŅæBŻ¼ė├m▒Ē╩ŠŻ¼╗“ųĖļŖÖC▐D▀^ę╗éĆ²XŠÓĮŪ╦∙ąĶ├}ø_öĄĪŻ
3.3 ▒Ż│ų▐DŠž
╩ŪųĖ▓Į▀MļŖÖC═©ļŖĄ½ø]ėą▐DäėĢrŻ¼Č©ūėµiūĪ▐DūėĄ─┴”ŠžĪŻ
(ūóŻ║═©│Ż▓Į▀MļŖÖCį┌Ą═╦┘ĢrĄ─┴”ŠžĮėĮ³▒Ż│ų▐DŠžĪŻ╚╦éā│ŻšfĄ─2NĪżMĄ─▓Į▀MļŖÖCŻ¼į┌ø]ėą╠ž╩Ōšf├„Ą─ŪķørŽ┬╩ŪųĖ▒Ż│ų▐DŠž×ķ2NĪżMĄ─▓Į▀MļŖÖC)
3.4 Č©╬╗▐DŠž
ļŖÖCį┌▓╗═©ļŖĀŅæBŽ┬Ż¼ļŖÖC▐Dūėūį╔ĒĄ─µiČ©┴”ŠžĪŻ
3.5 ▓ĮŠÓĮŪ
ī”æ¬ę╗éĆ├}ø_ą┼╠¢Ż¼ļŖÖC▐Dūė▐D▀^Ą─ĮŪ╬╗ęŲĪŻ
3.6 ╩¦▓Į
ļŖÖC▀\▐DĢr▀\▐DĄ─▓ĮöĄŻ¼▓╗Ą╚┼c└Ēšō╔ŽĄ─▓ĮöĄĪŻ
3.7 ╩¦š{ĮŪ
▐Dūė²X▌SŠĆŲ½ęŲČ©ūė²X▌SŠĆĄ─ĮŪČ╚Ż¼ļŖÖC▀\▐D▒ž┤µį┌╩¦š{ĮŪŻ¼ė╔╩¦š{ĮŪ«a╔·Ą─š`▓ŅŻ¼▓╔ė├╝ÜĘų“īäė╩Ū▓╗─▄ĮŌøQĄ─ĪŻ
3.8 ▀\ąąŠžŅl╠žąį
ļŖÖCį┌─│ĘN£yįćŚl╝■Ž┬£yĄ├▀\ąąųą▌ö│÷┴”Šž┼cŅl┬╩ĻPŽĄĄ─Ū·ŠĆĪŻ
╦─Īó▓Į▀M“īäėŲ„įŁ└Ē
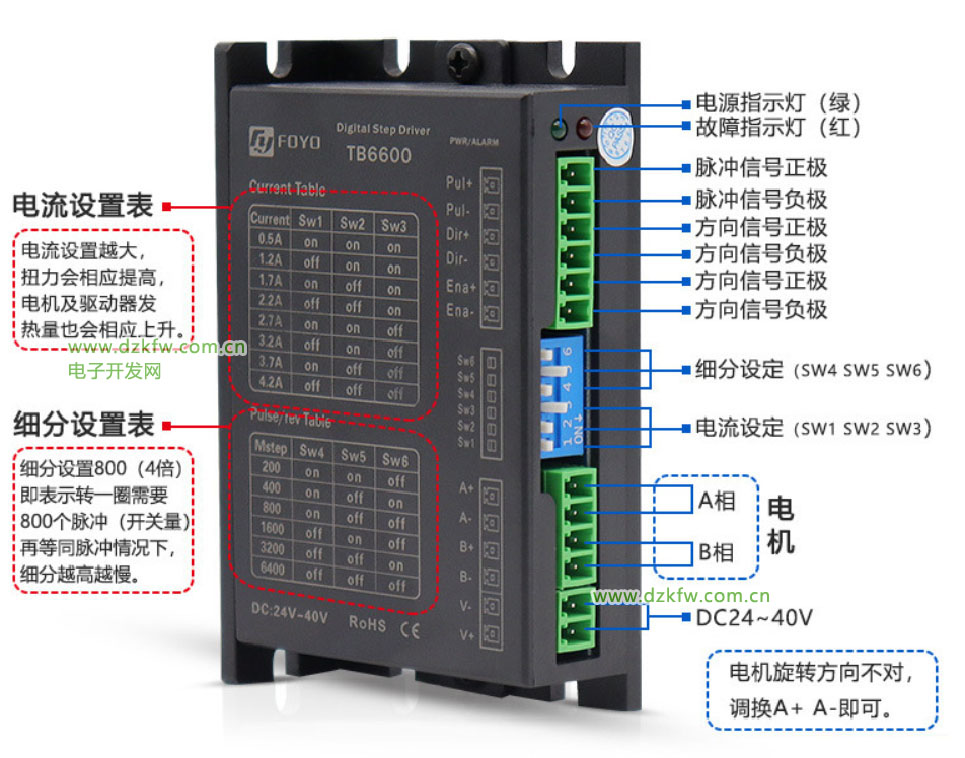
3.1 ┐žųŲą┼╠¢Įė┐┌
3.2 ╣”┬╩Įė┐┌

3.3 ō▄┤a║¼┴x
3.4 ĀŅæBųĖ╩Š
ŠG╔½ LED ×ķļŖį┤ųĖ╩Š¤¶Ż¼«ö“īäėŲ„Įė═©ļŖį┤ĢrŻ¼įō LED │Ż┴┴Ż╗
«ö“īäėŲ„ŪąöÓļŖį┤ĢrŻ¼įōLED Ž©£ńĪŻ╝t╔½ LED ×ķ╣╩šŽųĖ╩Š¤¶Ż¼«ö│÷¼F╣╩šŽĢrŻ¼įōųĖ╩Š¤¶Ė∙ō■╣╩šŽŅÉą═Ż¼ęį0.2├ļ裣hķWĀqįOČ©Ą─┤╬öĄŻ¼╚╗║¾ęį1├ļķgĖ¶└^└mųžÅ═ęį0.2├ļ裣hķWĀqįOČ©Ą─┤╬öĄĪŻ
ų▒ĄĮ╣╩šŽ▒╗ė├æ¶ŪÕ│²Ż¼╝t╔½ LED│Ż£ńĪŻ╣╩šŽŅÉą═ī”æ¬Ą─ķWĀq┤╬öĄ╚ńŽ┬▒ĒŻ║

3.5 ā╔ŽÓ▓Į▀MļŖÖCģ^ĘųŽÓą“Ą─ĘĮĘ©
ĘĮĘ©ę╗
ā╔ŽÓ╦─ŠĆČ╝ø]ėąČ╠ĮėĢrŻ¼ą²▐D▓Į▀MļŖÖCĄ─▌SŻ¼┤╦Ģr▐D▌Sæ¬įō▒╚▌^╚▌ęū▐DäėĪŻ
īó╚╬ęŌā╔Ė∙ŠĆČ╠ĮėŻ¼╚╗║¾ą²▐D▓Į▀MļŖÖCĄ─▌SŻ¼┤╦Ģr╚¶▒╚▌^└¦ļy▐DäėŻ¼ätšf├„įōā╔Ė∙ŠĆ×ķ═¼ŽÓą“ĪŻĘ±ät×ķ▓╗═¼ŽÓą“ĪŻ
ĘĮĘ©Č■
īó╚fė├▒Ē┤“ĄĮļŖūĶÖnŻ¼╚╬ęŌā╔Ė∙ŠĆĮėĄĮ╚fė├▒Ē╝t║┌ā╔Č╦Ż¼╚¶┤╦ĢrļŖūĶ▌^ąĪĢrŻ¼ätšf├„įōā╔ŠĆ×ķ═¼ŽÓŻ╗╚¶ļŖūĶ¤oĖF┤¾ĢrŻ¼ätšf├„įōā╔ŠĆ×ķĘŪ═¼ŽÓĪŻ
3.6 ┐žųŲą┼╠¢┼c▓Į▀M“īäėŲ„ĮėŠĆĘĮĘ©
╚šŽĄPLCŻ©ÜW─Ę²łĪó▒ČĖŻĄ╚Ż®▌ö│÷Q³c╩ŪĄ═ļŖŲĮŻ¼ę“┤╦Įė▓Į▀M“īäėŲ„Ą─PUL-/DIR-Ż¼▓Į▀M“īäėŲ„Ą─PUL+/DIR+╣▓Ļ¢śOŻ¼Įė24VĪŻ
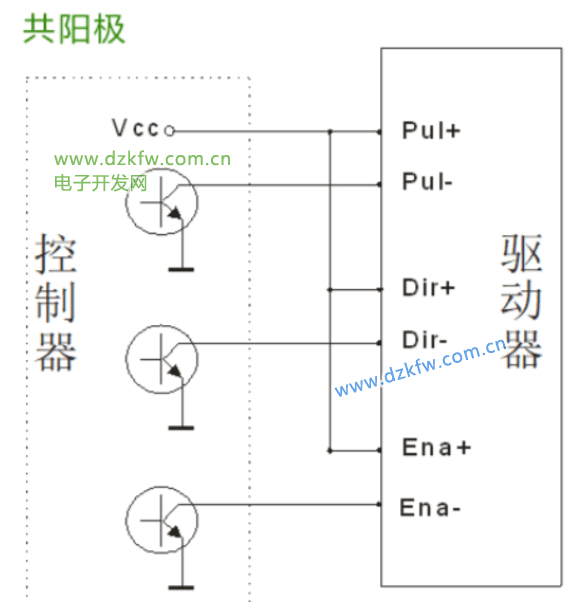
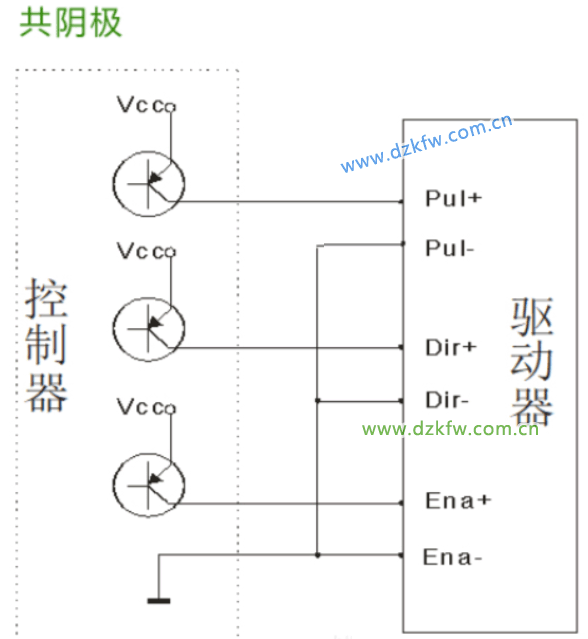
ÜWŽĄPLCŻ©╬„ķTūėĄ╚Ż®▌ö│÷Q³c╩ŪĖ▀ļŖŲĮŻ¼ę“┤╦Įė▓Į▀M“īäėŲ„Ą─PUL+/DIR+Ż¼▓Į▀M“īäėŲ„Ą─PUL-/DIR-╣▓ĻÄśOŻ¼Įė0VĪŻ
Ena+/Ena-×ķ├ōÖCą┼╠¢
┤“ķ_├ōÖC╣”─▄║¾Ż¼ļŖÖC▐Dūė╠Äė┌ūįė╔▓╗µiČ©ĀŅæBŻ¼┐╔ęį▌p╦╔▐DäėŻ¼┤╦Ģr▌ö╚ļ├}ø_ą┼╠¢▓╗Ēææ¬Ż¼
ĻPķ]┤╦ą┼╠¢║¾ļŖÖCĮė╩▄├}ø_ą┼╠¢š²│Ż▀\▐DĪŻ
ūóŻ║ę╗░Ńį┌īŹļHæ¬ė├ųą┐╔▓╗ĮėĪŻ
╬ÕĪóĻPė┌▓Į▀MļŖÖCŽÓöĄĪó╝ÜĘųĪó▓ĮŠÓĮŪ
╗ņ║Ž╩Į▓Į▀MļŖÖCĮY║Ž┴╦ė└┤┼╩Į▓Į▀MļŖÖC║═Ę┤æ¬╩Į▓Į▀MļŖÖCĄ─ā׳cĪŻ
─┐Ū░│Żė├Ą─ėąČ■ŽÓ▓Į▀MļŖÖCĪó╚²ŽÓ▓Į▀MļŖÖCĪó╬ÕŽÓ▓Į▀MļŖÖCŻ║ā╔ŽÓ▓Į▀MļŖÖC▓Į▀MĮŪę╗░Ń×ķ1.8Č╚║═0.9Č╚Ż¼╚²ŽÓ▓Į▀MļŖÖC▓ĮŠÓĮŪ×ķ1.2Č╚Ż¼╬ÕŽÓ▓Į▀MļŖÖC▓Į▀MĮŪę╗░Ń×ķ 0.72Č╚ĪŻ

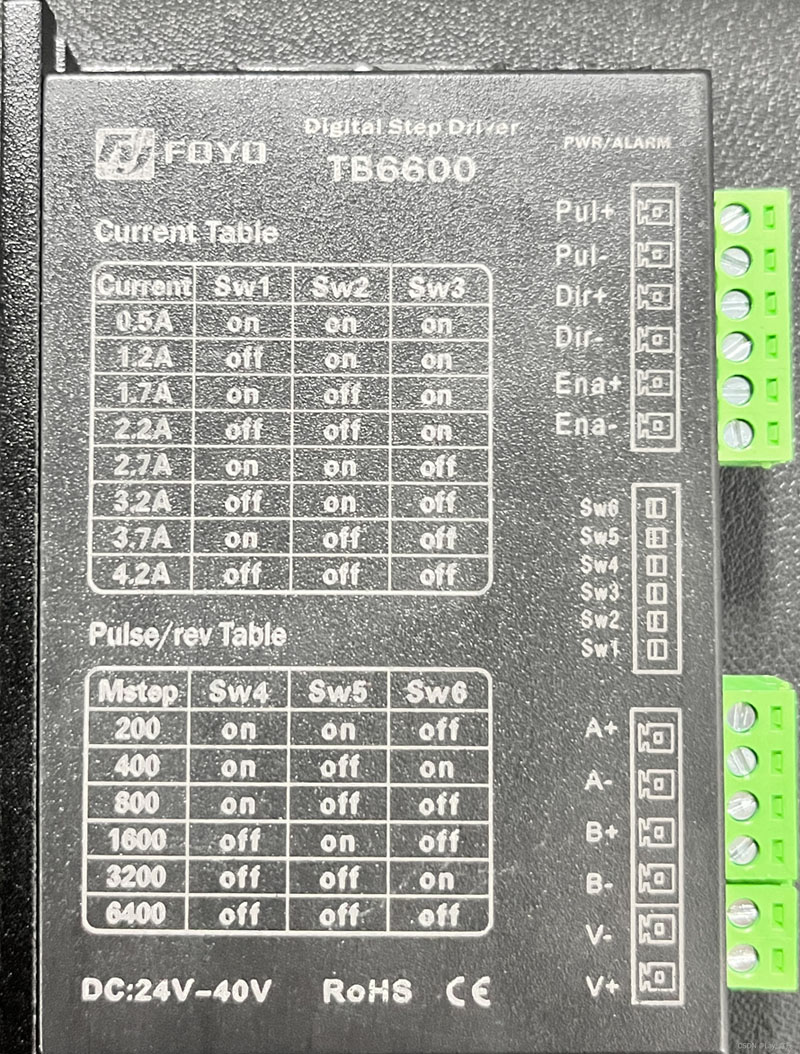
5.1 ▓Į▀MļŖÖC╣╠ėą▓ĮŠÓĮŪ
╦³▒Ē╩Š┐žųŲŽĄĮy├┐░lę╗éĆ▓Į▀M├}ø_ą┼╠¢Ż¼▓Į▀MļŖÖC╦∙▐DäėĄ─ĮŪČ╚ĪŻ
▓Į▀MļŖÖC│÷ÅSĢrĮo│÷┴╦ę╗éĆ▓ĮŠÓĮŪĄ─ųĄŻ¼╚ń╔ŽłDļŖÖCĮo│÷Ą─ųĄ×ķ▓ĮŠÓĮŪ╩Ū1.8ĪŃŻ©▒Ē╩Š░ļ▓Į╣żū„Ģr×ķ0.9ĪŃĪóš¹▓Į╣żū„Ģr×ķ1.8ĪŃŻ®Ż¼▀@éĆ▓ĮŠÓĮŪ┐╔ęįĘQų«×ķĪ░▓Į▀MļŖÖC╣╠ėą▓ĮŠÓĮŪĪ▒Ż¼╦³▓╗ę╗Č©╩ŪļŖÖCīŹļH╣żū„ĢrĄ─šµš²Ī░▓ĮŠÓĮŪĪ░Ż¼šµš²Ą─Ī░▓ĮŠÓĮŪĪ░║═▓Į▀MļŖÖC“īäėŲ„╝ÜĘųėąĻPĪŻ
5.2 ▓Į▀MļŖÖCĄ─ŽÓöĄ
╩ŪųĖ▓Į▀MļŖÖCā╚▓┐Ą─ŠĆ╚”ĮMöĄŻ¼─┐Ū░│Żė├Ą─ėąČ■ŽÓĪó╚²ŽÓĪó╬ÕŽÓ▓Į▀MļŖÖCĪŻ
ŽÓöĄ▓╗═¼Ż¼Ųõ▓ĮŠÓĮŪę▓▓╗═¼Ż¼ę╗░ŃČ■ŽÓ▓Į▀MļŖÖCĄ─▓ĮŠÓĮŪ×ķ0.9ĪŃ/1.8ĪŃĪó╚²ŽÓ▓Į▀MļŖÖCĄ─×ķ1.2ĪŃĪó╬ÕŽÓ▓Į▀MļŖÖCĄ─×ķ0.72ĪŃ ĪŻ
į┌ø]ėą╝ÜĘų“īäėŲ„ĢrŻ¼ė├æ¶ų„ę¬┐┐▀xō±▓╗═¼ŽÓöĄĄ─▓Į▀MļŖÖCüĒØMūŃūį╝║ī”▓ĮŠÓĮŪĄ─ę¬Ū¾ĪŻ
╚ń╣¹╩╣ė├▓Į▀MļŖÖC╝ÜĘų“īäėŲ„Ż¼ätĪ░ŽÓöĄĪ░īóūāĄ├ø]ėąęŌ┴xŻ¼ė├æ¶ų╗ąĶį┌▓Į▀MļŖÖC“īäėŲ„╔ŽĖ─ūā╝ÜĘųöĄŻ¼Š═┐╔ęįĖ─ūā├}ø_«ö┴┐ĪŻ╝┤ųĖĄ─╩Ūę╗éĆ├}ø_ļŖÖC▐DäėĄ─ĮŪČ╚ĪŻ
5.3 ▓Į▀MļŖÖC╝ÜĘųöĄ
╝ÜĘų╩Ū“īäėŲ„īó╔Ž╬╗ÖC░l│÷Ą─├┐éĆ├}ø_░┤“īäėŲ„įOČ©Ą─╝ÜĘų▒ČöĄ║¾ī”ļŖÖC▀Mąą┐žųŲĪŻ
║åå╬Ą─šfŻ¼Š═╩Ūį┌ļŖÖCĄ─▓ĮŠÓĮŪ░┤šš╝ÜĘų▒Č┬╩▀Mąą┐sąĪĪŻ
▒╚╚ń1.8ĪŃ▓ĮŠÓĮŪĄ─▓Į▀MļŖÖCŻ¼“īäėŲ„╝ÜĘųįOų├×ķ32Ż¼ät├}ø_«ö┴┐1.8ĪŃ/32=0.05625ĪŃĪŻ
╗“š▀ę▓┐╔ęį└ĒĮŌ×ķ├┐▐Dę╗╚”×ķ200éĆ├}ø_Ż¼╝ÜĘų×ķ32▒ČŻ¼─Ū├┤▓Į▀MļŖÖC“īäėŲ„ąĶę¬▌ö│÷200*32=6400éĆ├}ø_▓Į▀MļŖÖC▓┼▐Dę╗╚”ĪŻ
═©│Ż╝ÜĘųėą2Īó4Īó8Īó16Īó32Īó64Īó128Īó256ĪóŲš═©ł÷Š░æ¬ė├Ž┬Į©ūh╝ÜįOų├į┌10000ū¾ėę╝┤┐╔Ż¼╝ÜĘųų„ę¬╩ŪĖ─╔ŲļŖÖCĄ─▀\ąąąį─▄Ż¼╩╣▓Į▀MļŖÖC▀\ąąĖ³ŲĮĘĆŻ¼įļę¶Ė³ąĪĪŻ
┼e└²šf├„Ż║
ā╔ŽÓ▓Į▀MļŖÖCĄ─╗∙▒Š▓ĮŠÓĮŪ╩Ū1.8ĪŃŻ¼╝┤ę╗éĆ├}ø_ū▀1.8ĪŃŻ¼╚ń╣¹ø]ėą╝ÜĘųŻ¼ät╩Ū200éĆ├}ø_ū▀ę╗╚”360ĪŃĪŻ
╝ÜĘų╩Ū═©▀^“īäėŲ„┐┐Š½┤_┐žųŲļŖÖCĄ─ŽÓļŖ┴„╦∙«a╔·Ą─Ż¼┼cļŖÖC¤oĻPĪŻ╚ń╣¹╩Ū10╝ÜĘųŻ¼ät░lę╗éĆ├}ø_ļŖÖCū▀0.18ĪŃŻ¼╝┤2000éĆ├}ø_ū▀ę╗╚”360ĪŃŻ¼ļŖÖCĄ─Š½Č╚─▄ʱ▀_ĄĮ╗“ĮėĮ³0.18ĪŃŻ¼▀Ć╚ĪøQė┌╝ÜĘų“īäėŲ„Ą─╝ÜĘųļŖ┴„┐žųŲŠ½Č╚Ą╚Ųõ╦³ę“╦žĪŻ
▓╗═¼ÅS╝ęĄ─╝ÜĘų“īäėŲ„Š½Č╚┐╔─▄▓Ņäe║▄┤¾Ż╗╝ÜĘųöĄįĮ┤¾Š½Č╚įĮļy┐žųŲĪŻęį┤╬ŅÉ═ŲĪŻ
╚²ŽÓ▓Į▀MļŖÖCĄ─╗∙▒Š▓ĮŠÓĮŪ╩Ū1.2ĪŃŻ¼╝┤ę╗éĆ├}ø_ū▀1.2ĪŃŻ¼╚ń╣¹ø]ėą╝ÜĘųŻ¼ät╩Ū300éĆ├}ø_ū▀ę╗╚”360ĪŃŻ¼╚ń╣¹╩Ū10╝ÜĘųŻ¼ät░lę╗éĆ├}ø_Ż¼ļŖÖCū▀0.12ĪŃŻ¼╝┤3000éĆ├}ø_ū▀ę╗╚”360ĪŃŻ¼ęį┤╬ŅÉ═ŲĪŻ
5.4 ▒Ż│ų▐DŠž
╩ŪųĖ▓Į▀MļŖÖC═©ļŖĄ½ø]ėą▐DäėĢrŻ¼Č©ūėµiūĪ▐DūėĄ─┴”ŠžĪŻ╦³╩Ū▓Į▀MļŖÖCūŅųžę¬Ą─ģóöĄų«ę╗Ż¼═©│Ż▓Į▀MļŖÖCį┌Ą═╦┘ĢrĄ─┴”ŠžĮėĮ³▒Ż│ų▐DŠžĪŻ
ė╔ė┌▓Į▀MļŖÖCĄ─▌ö│÷┴”ŠžļS╦┘Č╚Ą─į÷┤¾Č°▓╗öÓ╦ź£pŻ¼▌ö│÷╣”┬╩ę▓ļS╦┘Č╚Ą─į÷┤¾Č°ūā╗»Ż¼╦∙ęį▒Ż│ų▐DŠžŠ═│╔×ķ┴╦║Ō┴┐▓Į▀MļŖÖCūŅųžę¬Ą─ģóöĄų«ę╗ĪŻ
▒╚╚ńŻ¼«ö╚╦éāšf1N.mĄ─▓Į▀MļŖÖCŻ¼į┌ø]ėą╠ž╩Ōšf├„Ą─ŪķørŽ┬╩ŪųĖ▒Ż│ų▐DŠž×ķ1N.mĄ─▓Į▀MļŖÖCĪŻ

┴∙Īó │ŻęŖå¢Ņ}╝░ĮŌ┤
1Īóå¢Ż║│§┤╬╩╣ė├įō▓Į▀M“īäėŲ„Ż¼╚ń║╬─▄▒M┐ņ╔Ž╩ųŻ┐
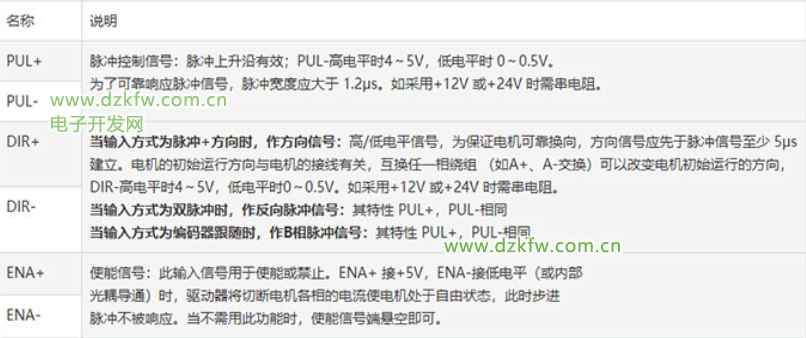
┤Ż║š²┤_Įė║├ļŖį┤║═ļŖÖC║¾Ż¼ų╗Įė├}ø_ą┼╠¢PUL(Ž╚īóŅl┬╩įOų├×ķ1Kęįā╚)Ż¼╝ÜĘųįOų├×ķ16Ż¼ĘĮŽ“║═├ōÖCæę┐šŻ¼┤╦Ģr╝ėļŖ║¾ļŖÖC─¼šJš²▐DĪŻ▀\ąą¤oš`║¾į┘ę└┤╬£yįć╝ė╦┘(╠ßĖ▀Ņl┬╩)ĪóĘĮŽ“Īó╝ÜĘų║═├ōÖCĄ╚╣”─▄ĪŻ
2Īóå¢Ż║┐žųŲą┼╠¢Ė▀ė┌5VŻ¼ę╗Č©ę¬╝ė┤«┬ōļŖūĶå߯┐
┤Ż║╩ŪĄ─Ż¼Ę±ätėą┐╔─▄¤²Ü¦“īäėŲ„┐žųŲĮė┐┌Ą─ļŖ┬ĘĪŻ
3Īóå¢Ż║ĮėŠĆ║¾ļŖį┤ųĖ╩Š¤¶┴┴Ż¼Ą½ļŖÖC▓╗▐DŻ¼╩Ū╩▓├┤įŁę“Ż┐
┤Ż║╚ń╣¹ĮėŠĆš²┤_Ż¼Ą½╚į╚╗▓╗▐DŻ¼šf├„┐žųŲ▓┐Ęų“īäė─▄┴”▓╗ē“Ż¼▀@ĘNŪķørČÓ│÷¼Fį┌ė├å╬Ų¼ÖCĄ─io┐┌ų▒Įė┐žųŲĘĮ╩ĮĪŻšł┤_▒Ż┐žųŲĮė┐┌ėą5mAĄ─“īäė─▄┴”ĪŻ
4Īóå¢Ż║╚ń║╬┼ąöÓ▓Į▀MļŖÖC╦─ŚlŠĆĄ─Č©┴xŻ┐
┤Ż║īóļŖÖCĄ─╚╬ęŌā╔ŚlŠĆĮėį┌ę╗ŲŻ¼┤╦Ģrė├╩ųöQļŖÖC▐DūėėąūĶ┴”Ż¼ät▀@ā╔ŚlŠĆ╩Ū═¼ę╗ŽÓŻ¼┐╔Įėį┌“īäėŲ„A+ĪóA-Ż╗┴Ē═Ōā╔ŚlŠĆČ╠Įė╚į╚╗ėąūĶ┴”Ż¼ätīó▀@ā╔ŚlŠĆĮėį┌B+║═B-ĪŻ
5Īóå¢Ż║ļŖÖCĄ─š²Ę┤▐DŪķør┼cæ¬īŹļH▀_ĄĮĄ─ŽÓĘ┤Ż┐
┤Ż║ų╗ąĶę¬░čļŖÖCŲõųąę╗ŽÓĄ─ā╔Ė∙ŠĆ╗źōQĮė╚ļ╝┤┐╔ĪŻ
1.ļŖÖCą²▐DļŖ┴„ų©ų©┬Ģę¶▀^┤¾ PWMŅl┬╩▀^Ą═ Ė─ūāĘĮĘ©╠ßĖ▀Ņl┬╩╗“š▀£p╔┘╝ÜĘųöĄ
2.“īäėŲ„ūįäėöÓļŖĢr įOų├ļŖ┴„▀^┤¾,æ¬įōĮĄĄ═įOų├ļŖ┴„
3.ļŖ┴„įOų├Ģ■ė░Ēæ▐D╦┘
4.ļŖÖC▀^ĀCŻ¼įOų├Ą─ļŖ┴„▀^┤¾,æ¬įōĮĄĄ═įOų├ļŖ┴„
5.ENA-║═ENA+▓╗ĮėŻ¼▀@╩Ū├ōÖCą┼╠¢┐žųŲ
6.PWM▌ö│÷Č╝▓╔ė├ķ_┬®▌ö│÷Ż¼ąĶę¬═ŌĮė╔Ž└Ł5VŻ¼▓╗╚╗ø]ėąPWM▌ö│÷
7.«ö▀xō±ļŖÖC▐D╦┘▌^┬²Ģr,æ¬įō▀xō±Ė³ČÓĄ─╝ÜĘųöĄ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū