
╬ęéāų¬Ą└▓Į▀MļŖÖCė╔Č©ūėŻ©statorŻ®║═▐DūėŻ©rotorŻ®śŗ│╔Ż¼Č©ūė└@ĮM═©ļŖ║¾«a╔·Ėąæ¬┤┼ł÷Ż¼Ėąæ¬┤┼ł÷┼c▐DūėŽÓ╗źū„ė├Č°╩╣▐Dūė▐D▀^ę╗Č©Ą─ĮŪČ╚ĪŻ═©▀^┐žųŲČ©ūė└@ĮMų▄Ų┌ąįĪóĮ╗╠µĄ├ļŖŻ¼Š═─▄┐žųŲ▓Į▀MļŖÖCę╗▓Įę╗▓ĮĄ─Ž“Ū░▀\äėĪŻ▓Į▀MļŖÖC▐DūėŠĆ╚”▀@ĘNų▄Ų┌ąįĄ─┐žųŲąĶę¬īŻķTĄ─┐žųŲŲ„üĒīŹ¼FŻ¼▀@éĆ┐žųŲŲ„Š═╩ŪĮ±╠ņ╬ęéāę¬ĮķĮBĄ─▓Į▀M“īäėŲ„ĪŻ
▒Š╣ØšnīóĮķĮB╚ńŽ┬ā╚╚▌Ż║
1Ż®╩▓├┤╩Ū▓Į▀M“īäėŲ„Ż┐
2Ż®▓Į▀M“īäėŲ„Ą─ĮėŠĆ╝░įOų├Ż╗
3Ż®▓Į▀M“īäėŲ„╝ÜĘų“īäėįOų├Ż╗
4Ż®▓Į▀MļŖÖCča│õā╚╚▌Ż╗

1Īó╩▓├┤╩Ū▓Į▀M“īäėŲ„Ż┐
▓Į▀M“īäėŲ„╩Ū“īäė▓Į▀MļŖÖC▀\ąąĄ─╣”┬╩Ę┼┤¾Ų„Ż¼╦³─▄Įė╩š┐žųŲŲ„Ż©PLC/å╬Ų¼ÖCĄ╚Ż®░l╦═üĒĄ─┐žųŲą┼╠¢▓ó┐žųŲ▓Į▀MļŖÖC▐D▀^ŽÓæ¬Ą─ĮŪČ╚/▓ĮöĄĪŻūŅ│ŻęŖĄ─┐žųŲą┼╠¢╩Ū├}ø_ą┼╠¢Ż¼▓Į▀M“īäėŲ„Įė╩šĄĮę╗éĆėąą¦├}ø_Š═┐žųŲ▓Į▀MļŖÖC▀\ąąę╗▓ĮĪŻŠ▀ėą╝ÜĘų╣”─▄Ą─▓Į▀M“īäėŲ„┐╔ęįĖ─ūā▓Į▀MļŖÖCĄ─╣╠ėą▓ĮŠÓĮŪŻ¼▀_ĄĮĖ³┤¾Ą─┐žųŲŠ½Č╚ĪóĮĄĄ═š±äė╝░╠ßĖ▀▌ö│÷▐DŠžŻ╗│²┴╦├}ø_ą┼╠¢Ż¼Š▀ėą┐éŠĆ═©ą┼╣”─▄Ą─▓Į▀M“īäėŲ„▀Ć─▄Įė╩š┐éŠĆą┼╠¢┐žųŲ▓Į▀MļŖÖC▀MąąŽÓæ¬Ą─äėū„ĪŻ
2Īó▓Į▀M“īäėŲ„Ą─ĮėŠĆ╝░įOų├
─┐Ū░╩ął÷╔Žėą║▄ČÓ▓Į▀M“īäėŲ„Ż¼Ė„ÅS╝ęĄ─“īäėŲ„Š▀ėąŅÉ╦ŲĄ─Įė┐┌Ż¼Č╝ėąą┼╠¢ĪóļŖį┤ĪóļŖÖCĄ╚ĮėŠĆČ╦ūėŻ╗ėą▌ö│÷ļŖ┴„╝░╝ÜĘų“īäėįOų├Ą─ō▄┤aķ_ĻPĪŻ▒Š╣Øęį└ū┘É┐Ų╝╝Ż©LeadShineŻ®Ą─DM542▓Į▀M“īäėŲ„×ķ└²Ż¼ĮķĮBŽ┬▓Į▀M“īäėŲ„Ą─ĮėŠĆ╝░įOų├ĪŻ
DM542╩Ū└ū┘É╣½╦Š═Ų│÷Ą─ā╔ŽÓ▓Į▀MļŖÖC“īäėŲ„Ż¼▓╔ė├├}ø_ĘĮ╩Į▀Mąą┐žųŲŻ¼ų¦│ų8Ön╬╗ļŖ┴„╝░16Ön╬╗╝ÜĘų“īäėŻ╗▌ö╚ļļŖē║ĘČć·Ż║DC 20V~50VŻ¼▌ö│÷ĘÕųĄļŖ┴„ĘČć·Ż║1.0~4.2AŻ╗Ž┬├µ▀@ÅłłD╩ŪDM542Ą─═Ōė^łDŻ║

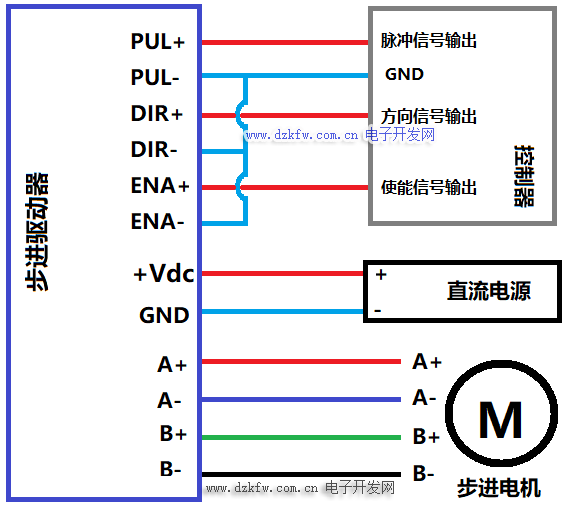
Å─łDŲ¼ųą┐╔ęį┐┤│÷Ż¼DM542▓Į▀M“īäėŲ„░³└©┐žųŲą┼╠¢Č╦ūėĪóļŖį┤Č╦ūėĪóļŖÖCĮėŠĆČ╦ūėĪó▌ö│÷ļŖ┴„įOų├║═╝ÜĘų“īäėįOų├ō▄┤aķ_ĻPĄ╚Äū▓┐ĘųĮM│╔ĪŻ
2.1Īó┐žųŲą┼╠¢Č╦ūė
┐žųŲą┼╠¢Č╦ūė┼cPLCĪóå╬Ų¼ÖC╗“Ųõ╦³┐žųŲŲ„ŽÓ▀BĮėŻ¼ė├üĒĮė╩š┐žųŲŲ„░l│÷Ą─├}ø_ĪóĘĮŽ“╝░╩╣─▄┐žųŲą┼╠¢ĪŻ
2.1.1Īó├}ø_ą┼╠¢Ż©PulseŻ®
├}ø_ą┼╠¢ėąā╔éĆĮėŠĆČ╦ūėŻ║PUL+║═PUL-ĪŻ'PUL+'▀BĮė├}ø_ą┼╠¢š²śOŻ¼Ī░PUL-Ī▒▀BĮė├}ø_ą┼╠¢žōśOŻ╗├}ø_ą┼╠¢ęį'PUL+'┼c'PUL-'Ą─ļŖē║▓ŅüĒ║Ō┴┐Ż╗ō▄┤aķ_ĻPSW13┐╔įOų├├}ø_Ą─ėąą¦čžŻ¼─¼šJŻ©SW13=OFFŻ®╔Ž╔²čžėąą¦Ż╗
2.1.2ĪóĘĮŽ“ą┼╠¢Ż©DirectionŻ®
ĘĮŽ“ą┼╠¢ėąā╔éĆĮėŠĆČ╦ūėŻ║DIR+║═DIR-ĪŻ'DIR+'▀BĮėĘĮŽ“ą┼╠¢š²śOŻ¼'DIR-'▀BĮėĘĮŽ“ą┼╠¢žōśOŻ╗▓Į▀MļŖÖCĄ─│§╩╝▀\ąąĘĮŽ“┼cļŖÖC└@ĮMĄ─ĮėŠĆėąĻPŻ¼╚╬║╬ę╗ĮM└@ĮM╗źōQŻ©▒╚╚ńŻ║A+║═A-╗źōQŻ®Č╝─▄Ė─ūāļŖÖCĄ─│§╩╝▀\ąąĘĮŽ“Ż╗ļŖÖCį┌▀\ąą▀^│╠ųąĄ─ĘĮŽ“Ė─ūā┐╔ęį═©▀^ĘĮŽ“ą┼╠¢üĒ┐žųŲŻ¼×ķ┴╦▒ŻūC▓Į▀MļŖÖC┐╔┐┐ōQŽ“Ż¼ĘĮŽ“ą┼╠¢æ¬įńė┌├}ø_ą┼╠¢ų┴╔┘5usĮ©┴óŻ╗
2.1.3Īó╩╣─▄ą┼╠¢Ż©EnableŻ®
╩╣─▄ą┼╠¢ė├ė┌╩╣─▄╗“Į¹ų╣“īäėŲ„▌ö│÷Ż¼ėąā╔éĆĮėŠĆČ╦ūėŻ║ENA+║═ENA-ĪŻ'ENA+'▀BĮė╩╣─▄ą┼╠¢š²śOŻ¼'ENA-'▀BĮė╩╣─▄ą┼╠¢žōśOŻ╗«ö'ENA+'ą┼╠¢Įė═©ĢrŻ¼“īäėŲ„īóŪąöÓ▓Į▀MļŖÖCĖ„ŽÓļŖį┤Č°╩╣Ųõ╠Äė┌ūįė╔ĀŅæBŻ¼įōĀŅæB▓╗Ēææ¬├}ø_ą┼╠¢Ż╗
ūóŻ║├}ø_ą┼╠¢ĪóĘĮŽ“ą┼╠¢║═╩╣─▄ą┼╠¢▌ö╚ļļŖē║ųĄĄ─┤¾ąĪ┐╔═©▀^╗¼äėķ_ĻPüĒįOų├Ż¼ėąDC 5V║═DC 24Vā╔ĘN▀xō±Ż¼│÷ÅS─¼šJDC 24VŻ╗
2.1.4Īół¾Š»ą┼╠¢Ż©AlarmŻ®
“īäėŲ„╣╩šŽą┼╠¢▌ö│÷Ż¼ė├ė┌▀BĮėĄĮPLC/┐žųŲŲ„Ą─▌ö╚ļ═©Ą└ĪŻ│÷ÅS─¼šJš²│ŻŪķørŽ┬ALM║═COM╩Ūī¦═©ĀŅæBŻ¼«ö“īäėŲ„ł¾Š»Ģr×ķĮžų╣ĀŅæBŻ╗┐╔═©▀^ō▄┤aķ_ĻPSW12įOų├Ż╗
2.1.4Īó▒¦ķlą┼╠¢Ż©BrakeŻ®Ż║▓Į▀MļŖÖCĄ─▒¦ķlą┼╠¢▌ö╚ļŻ╗
2.1.5ĪóCOMŻ║ł¾Š»ą┼╠¢║═▒¦ķlą┼╠¢Ą─╣½╣▓Č╦Ż╗
2.2ĪóļŖį┤Įė┐┌
ļŖį┤Įė┐┌░³└©2éĆĮėŠĆČ╦ūėŻ║+VdcĪóGNDŻ¼ŲõųąŻ║
+VdcŻ║ų▒┴„ļŖį┤š²śOŻ¼ļŖē║ĘČć·Ż║+20V~+50VŻ¼═Ų╦]+24V~+48VŻ╗
GNDŻ║ų▒┴„ļŖį┤žōśOŻ╗
2.3ĪóļŖÖCĮėŠĆČ╦ūė
ļŖÖCĮėŠĆČ╦ūė░³└©Ż║A+ĪóA-ĪóB+ĪóB-Ż¼ŲõųąŻ║
A+║═A-╩Ū▓Į▀MļŖÖCĄ─AŽÓ└@ĮMĄ─ā╔éĆĮėŠĆų∙Ż╗
B+║═B-╩Ū▓Į▀MļŖÖCĄ─BŽÓ└@ĮMĄ─ā╔éĆĮėŠĆų∙Ż╗
Ž┬├µ▀@ÅłłD╩Ū▓Į▀MļŖÖC“īäėŲ„Ą─ĮėŠĆłDŻ║
2.4Īó▓Į▀MļŖÖCĄ─ļŖ┴„įOų├
DM542▓Į▀M“īäėŲ„Ą─ųąķgėą8éĆō▄┤aķ_ĻPŻ©SW1~SW8Ż®Ż¼ŲõųąSW1~SW3ė├üĒįOų├╣żū„ļŖ┴„Ż©äėæBļŖ┴„Ż®Ż╗SW4ė├üĒįOų├ņoų╣ļŖ┴„Ż©ņoæBļŖ┴„Ż®Ż╗SW5~SW8╩Ū╝ÜĘųįOų├Ż©īóį┌Ą┌3ąĪ╣Øįö╝ÜĮķĮBŻ®Ż╗
2.4.1Īó╣żū„ļŖ┴„įOų├
═©▀^įOų├▓Į▀M“īäėŲ„Ą─ļŖ┴„▌ö│÷ō▄┤aķ_ĻPŻ¼┐╔ęįĖ─ūā“īäėŲ„Ą─▌ö│÷ļŖ┴„┤¾ąĪĪŻDM542Ą─SW1~SW3ō▄┤aķ_ĻPįOų├╚ńŽ┬łD╦∙╩ŠŻ║

«ö▓Į▀M“īäėŲ„įOų├Ą─▌ö│÷ļŖ┴„įĮ┤¾ĢrŻ¼Ųõ▀BĮėĄ─▓Į▀MļŖÖCĄ─▌ö│÷┴”ŠžŠ═įĮ┤¾ĪŻĄ½╩ŪļŖ┴„▀^┤¾Ģ■ī¦ų┬ļŖÖC║═“īäėŲ„░l¤ßŻ¼ć└ųžĢr┐╔─▄Ģ■ōpē─ļŖÖC╗““īäėŲ„ĪŻę“┤╦į┌įOų├▓Į▀M“īäėŲ„Ą─ļŖ┴„ĢrĮ©ūhū±čŁ╚ńŽ┬įŁätŻ║
-
╦─ŠĆļŖÖCŻ║įOų├▌ö│÷ļŖ┴„Ą╚ė┌╗“┬įąĪė┌ļŖÖCĄ─Ņ~Č©ļŖ┴„Ż╗
-
┴∙ŠĆļŖÖCĖ▀┴”Šž─Ż╩ĮŻ║įOų├▌ö│÷ļŖ┴„Ą╚ė┌ļŖÖCå╬śOąįĮėĘ©Ņ~Č©ļŖ┴„Ą─50%Ż╗
-
┴∙ŠĆļŖÖCĖ▀╦┘─Ż╩ĮŻ║įOų├▌ö│÷ļŖ┴„Ą╚ė┌ļŖÖCå╬śOąįĮėĘ©Ņ~Č©ļŖ┴„Ą─100%Ż╗
┼eéĆ└²ūėŻ║╝┘įOę¬ė├DM542“īäė└ū┘É42CM06▓Į▀MļŖÖCŻ¼įōļŖÖCĄ─Ņ~Č©ļŖ┴„×ķ2.5AŻ¼╬ęéāŠ═▓╔ė├▌ö│÷Š∙ųĄļŖ┴„2.36AĄ─Ön╬╗Ż¼įOų├SW1=OFFŻ¼SW2=ONŻ¼SW3=OFFŻ╗
┴Ē═Ōę¬ūóęŌŻ║▓Į▀MļŖÖCĄ─▀\äėŅÉą═╝░═Ż┴¶ĢrķgĄ─ķLČ╠Ż¼Č╝Ģ■ė░ĒæŲõ░l¤ß┴┐ĪŻę“┤╦į┌īŹļH╩╣ė├ųąæ¬ęĢļŖÖCĄ─░l¤ßŪķør▀m«öš{╣Ø▌ö│÷ļŖ┴„Ą─┤¾ąĪĪŻįŁät╔Ž╚ń╣¹ļŖÖC▀\ąą15~30ĘųńŖ║¾╚ń╣¹▒Ē├µ£žČ╚Ą═ė┌40Č╚Ż¼┐╔▀m«öį÷╝ėļŖ┴„įOų├ųĄęįį÷┤¾▌ö│÷┼żŠžŻ╗Ą½╚ń╣¹£ž╔²╠½Ė▀Ż©>70Č╚Ż®Ż¼ätæ¬ĮĄĄ═ļŖ┴„Ą─įOų├ųĄŻ╗
2.4.2Īóņoų╣ļŖ┴„įOų├
ō▄┤aķ_ĻPSW4┐╔ė├ė┌įOų├▓Į▀MļŖÖCį┌ņoų╣ĀŅæBĢr“īäėŲ„Ą─▌ö│÷ļŖ┴„ĪŻ─¼šJŪķørŽ┬SW4=OFFŻ¼╦³▒Ē╩Š“īäėŲ„į┌ø]ėąĮė╩šĄĮ├}ø_0.4├ļ║¾Ż¼īó▌ö│÷ļŖ┴„Ė─ūā×ķĘÕųĄļŖ┴„Ą─50%Ż¼▀@śė┐╔ęįĮĄĄ═“īäėŲ„║═ļŖÖCĄ─░l¤ßŻ╗╚ń╣¹īóSW4įOų├×ķONŻ¼ätļŖÖCį┌ņoų╣ĀŅæBŽ┬Ż¼“īäėŲ„Ą─▌ö│÷ļŖ┴„×ķŲõĘÕųĄļŖ┴„Ą─90%Ż╗
3Īó╝ÜĘų“īäėįOų├
3.1Īó╩▓├┤╩Ū╝ÜĘų“īäėŻ┐
▓Į▀MļŖÖCį┌│÷ÅSĢrČ╝ś╦ūó┴╦Ī░╣╠ėą▓ĮŠÓĮŪĪ▒ĪŻ▒╚╚ń─│ļŖÖCĄ─╣╠ėą▓ĮŠÓĮŪ×ķ0.9Č╚/1.8Č╚Ż¼▒Ē╩ŠļŖÖC░ļ▓Į╣żū„├┐┤╬Ģ■▐D▀^0.9Č╚Ż¼š¹▓Į1.8Č╚ĪŻį┌║▄ČÓŠ½├▄┐žųŲĄ─ł÷║ŽŻ¼╣╠ėą▓ĮŠÓĮŪ▓╗─▄ØMūŃ┐žųŲŠ½Č╚Ą─ę¬Ū¾Ż¼╚╦éāŽŻ═¹─▄īóę╗éĆ╣╠ėą▓ĮŠÓĮŪĘų║▄ČÓ▓ĮüĒū▀═ĻĪŻ▀@ĘNīó╣╠ėą▓ĮŠÓĮŪį┘Ęų│╔║▄ČÓ▓ĮĄ─“īäėĘĮĘ©Ż¼ĘQ×ķ'╝ÜĘų“īäė'ĪŻ─▄īŹ¼F╝ÜĘų“īäėĄ─“īäėŲ„Ż¼ĘQ×ķ'╝ÜĘų“īäėŲ„'ĪŻ
3.2Īó╝ÜĘų“īäėĄ─ā׳c
-
╝ÜĘų“īäėīó╣╠ėą▓ĮŠÓĮŪŲĮŠ∙Ęų│╔ÄūĘ▌Ż¼£p╔┘┴╦├┐▓ĮĄ─▓ĮŠÓĮŪĄ─┤¾ąĪŻ¼╠ßĖ▀┴╦▓ĮŠÓŠ∙ä“Č╚Ż¼╠ßĖ▀┴╦┐žųŲŠ½Č╚Ż╗
-
Ą═Ņlš±╩Ä╩Ū▓Į▀MļŖÖCĄ─╣╠ėą╠žąįŻ¼╝ÜĘų“īäė╠ßĖ▀┴╦ļŖÖCĄ─▐DäėŅl┬╩Ż¼┐╔ęįĮĄĄ═ļŖÖCĄ─š±äėŻ╗
-
╝ÜĘų“īäė┐╔ęįėąą¦£p╔┘▐DŠž▓©äėŻ¼╠ßĖ▀▌ö│÷▐DŠžŻ╗
3.4Īó╝ÜĘų“īäėĄ─įOų├
ęįDM542×ķ└²Ż¼įō“īäėŲ„╠ß╣®┴╦╦─éĆō▄┤aķ_ĻPŻ©SW5~SW8Ż®ė├üĒįOų├╝ÜĘų“īäėŻ¼╚ńŽ┬łD╦∙╩ŠŻ║
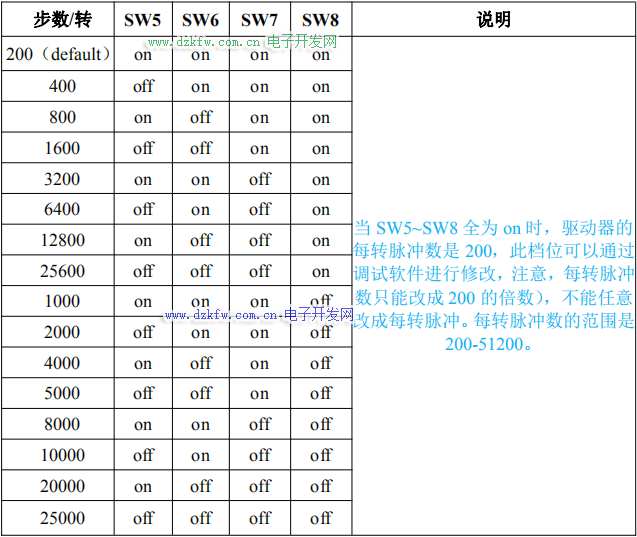
╝┘įO╬ęéāę¬░čļŖÖCįOų├×ķ3200▓Į/▐DŻ©╝┤├┐▐Dę╗╚”ąĶę¬3200éĆ├}ø_ą┼╠¢Ż®Ż¼ätō▄┤aķ_ĻPįOų├╚ńŽ┬Ż║SW5=ONŻ¼SW6=ONŻ¼SW7=OFFŻ¼SW8=ON
4Īó▓Į▀MļŖÖCča│õā╚╚▌
å¢Ż║ŲĮĢršfĄ─42ŽĄ┴ąĪó57ŽĄ┴ą▓Į▀MļŖÖCŠ▀¾w┤·▒Ē╩▓├┤ęŌ╦╝Ż┐
┤Ż║▀@└’šfĄ─42ŽĄ┴ąĪó57ŽĄ┴ąŻ¼╩ŪųĖ▓Į▀MļŖÖCĄ─ÖCū∙╠¢Ż¼ę▓Š═╩Ū▓Į▀MļŖÖCÖCū∙Ą─│▀┤ńĪŻ42ŽĄ┴ą▓Į▀MļŖÖC▒Ē╩ŠįōļŖÖCÖCū∙Ą─│▀┤ń×ķ42cmx42cmĪŻ└²╚ńŻ¼Ž┬łD╩Ū└ū┘É42ą═▓Į▀MļŖÖCÖCū∙Įž├µłDŻ║
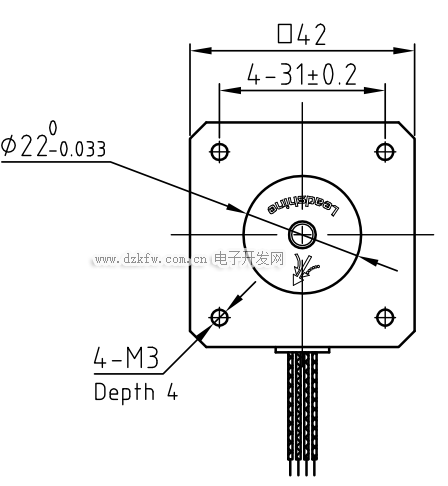
Ė∙ō■ÖCū∙╠¢ģ^ĘųŻ¼│ŻęŖĄ─▓Į▀MļŖÖCėą42ŽĄ┴ąĪó57ŽĄ┴ąĪó86ŽĄ┴ąĪó110ŽĄ┴ąĄ╚Ą╚Ż╗
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū