
在自動化設備中,步進驅動器和步進電機運用非常多。是每個技術員或電氣工程師必須掌握應用的一類元器件,那么怎么應用步進驅動器和步進電機,讓步進電機動起來?通過以下內容來學習。
01首先了解什么是步進驅動器和步進電機?步進驅動器(如下圖):是一種將電脈沖轉化為角位移的執行機構。當步進驅動器接收到一個脈沖信號(比如一個按鈕閉合導通一次后斷開),它就驅動步進電機按設定的方向轉動一個固定的角度 (稱為“ 步距角 ”電機轉一圈是360°,假如步進電機每轉需要200個脈沖,那么每接收1個脈沖電機軸轉1.8°),它的旋轉是以固定的角度一步一步運行的。
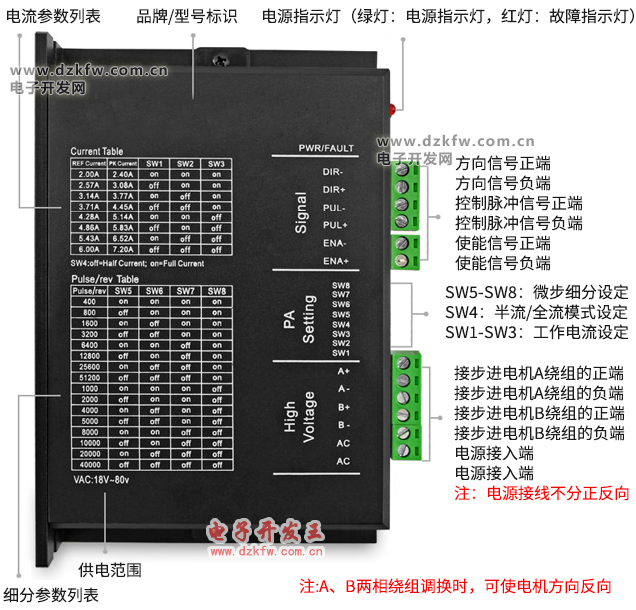
1、撥碼開關(如下圖):用于驅動器的工作電流,細分,半流/全流等參數的設置。

2、電流參數列表(如下圖):通常驅動器的最大電流要略大于電機標稱電流。假如驅動器電流選小了,在負載比較大時會丟步。驅動器電流選大了:慣量越大、電感增大,使電機運行的時候會有沖力,導致系統不平衡。

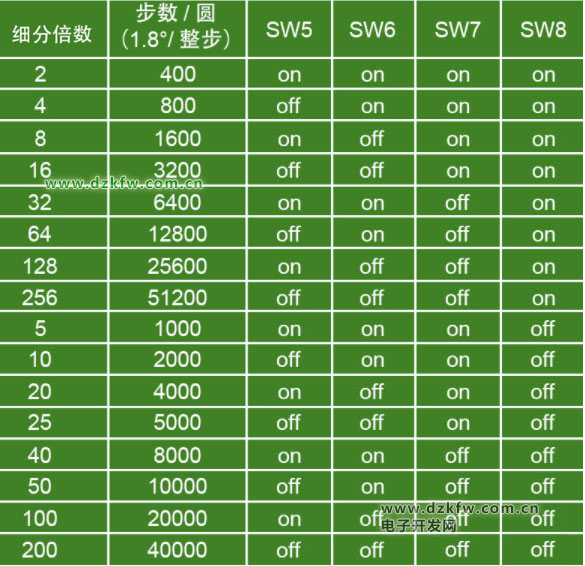
3、細分參數列表(如下圖):細分的概念是將上級裝置發出的每個脈沖按步進電機驅動器設定的細分系數分成系數個脈沖輸出。比如步進電機每轉一圈為200個脈沖(電機轉一圈360°每接收一個脈沖電機轉1.8°),如果步進電機驅動器細分倍數為32,那么步進電機驅動器需要輸出6400個脈沖步進電機才轉一圈。而用戶可以根據步進驅動器上的細分表設置撥碼開關(見下文),設置到自己需要的參數。
4、半流/全流模式設定:比如說一個電機的額定電流為4A,再有全流和半流設置的驅動器里面,你設為4A實際上只有2-3A,這就是半流,全流的話就是4A,一般情況下我們都用半流,電機會平穩些并且不會發熱,如果機械結構特殊。就像垂直運動的機械結構就需要全流來增大電機的力矩,負面影響就是電機可能會很快就發熱。
5、電源接入端子(如下圖):參照說明書說明,接上對應的電源。常見有DC24V~110V、AC18V~220V。
6、接電機相線端子:接電機線。任意對調A相、或者B相繞組接線,可以改變電機運行方向。不同電機繞組接線方式請參考兩相步進電機接線分析。
7、脈沖/方向/使能信號端子(如下圖):
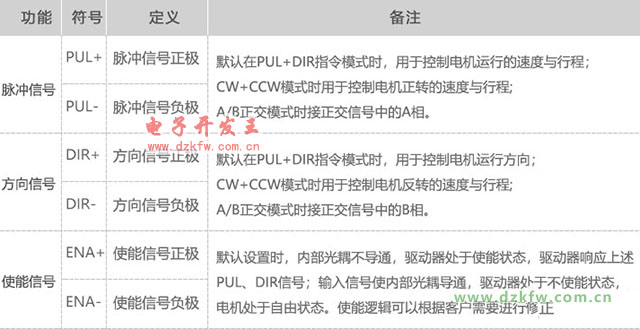
補充:1)有些品牌步進驅動器上有模式設置表,在撥碼開關上設置對應模式,本文以PUL+DIR指令模式為例。2)還有些步進驅動器輸入使能信號不可以設置;不導通使能信號,電機處于鎖軸狀態。導通使能信號,電機處于自由狀態。
步進電機(如下圖):是將電脈沖信號轉變為角位移或線位移的開環控制元步進電機件。
在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度。可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速的目的。

1、步進驅動器供電。在AC+AC-端子接上對應電壓的電源。
2、步進驅動器輸出。電機的A+、A-、B+、B-線(一般電機上有銘牌標識如下圖)接到步進驅動器的A+、A-、B+、B-端子。一般有4根線的、5根線的、6根線的、8根線的、10根線的等。

3、步進驅動器控制。步進驅動器的PUL+、DIR+、ENA+可以接到電源24V,PUL-、DIR-、ENA-可以分別接一個按鈕的一端,按鈕的另一端接電源0V。
1)每按一下PUL+的按鈕,步進啟動器接收一個脈沖的信號驅動輸出,步進電機走一個步距角。
2)如果要反轉,按住DIR-的按鈕情況下按PUL-的按鈕,就可以實現反轉。
3)當按住ENA-的按鈕,步進驅動器接收使能信號,步進電機的軸處于自由狀態,可以進行一些機械方面上的調試。如果步進驅動器沒有接收使能信號,是很難轉動電機軸,除非用超過電機鎖軸的力才能轉動,而且會損壞步進電機。
以上是用最簡單的按鈕方式發送脈沖信號給步進驅動器來控制步進電機。也可以用PLC高速脈沖輸出點發送脈沖給步進驅動器。可以分為共陽極和共陰極兩種接法。(如下圖)在PLC程序寫PLSY指令輸出脈沖,關于PLSY指令內容在下面做詳細講解。
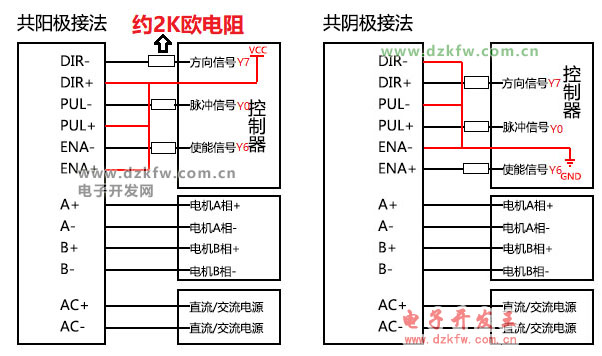
補充:按照以上接法就可以讓步進電機動起來。但是由于步進驅動器端子接收的電壓范圍是5V~24V。由于在平時使用24V的電源比較多,端子容易燒壞,可以在端子接線處串一個約2K歐的電阻來降低電流。
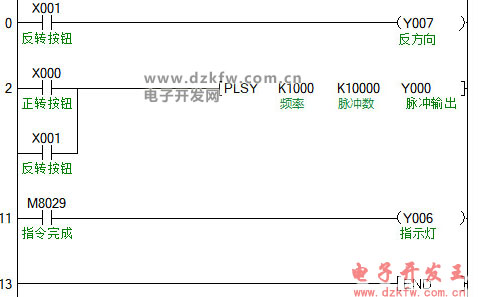
03PLSY指令的使用和注意要點以下圖來講解PLSY指令的使用。PLSY K1000 K10000 Y0中的第一個操作數K1000表示為1000Hz,意思是1S中通過第三個操作數Y0點輸出脈沖,閉合斷開1000次。第二個操作數K10000為脈沖數,通過Y0點輸出10000個脈沖。當按住X0按鈕,步進電機以1000KHz的速度正轉10秒。當按住X1按鈕,導通Y7線圈,Y7點接在驅動器DIR端子上,步進電機以1000KHz的速度反轉10秒。PLSY指令執行完,M8029閉合,Y6線圈得電。
注意要點:
1、在FX3UPLC中,PLSY指令只支持Y0和Y1點,Y2點不支持。
2、PLSY指令是16位指令,PLSY指令操作數最大為32767。可以在PLSY前加D,變為32位指令,最大允許100KHz。
3、指令完成標志位:M8029。當PLSY指令完成,M8029常開觸點會閉合。不需要人為復位,驅動PLSY的條件斷開后,M8029會自動斷開。
補充:
如何讓步進電機一直轉?把PLSY指令第二個操作數K10000改為K0,在閉合X0按鈕,步進電機就會一直轉。
通過以上三大部分的內容,來認識步進驅動器和步進電機,了解它們之間如何接線,以及PLSY指令的使用和注意要點。你也可以讓步進電機動起來!
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底