

S7-200 SMART CPU 提供了三種開環(huán)運(yùn)動(dòng)控制方法:
*脈沖串輸出 (PTO) :內(nèi)置在 CPU的速度和位置控制
*脈寬調(diào)制 (PWM) :內(nèi)置在 CPU的速度、位置或負(fù)載循環(huán)控制。
*運(yùn)動(dòng)軸:內(nèi)置于 CPU 中,用于速度和位置控制
我們?cè)诔绦蛑惺褂眠\(yùn)動(dòng)軸控制來控制步進(jìn)電機(jī)
STEP 7-Micro/WIN SMART 為 PWM 和運(yùn)動(dòng)軸實(shí)施固定輸出分配。
P0 和 P1

在“方向控制”(Directional Control) 節(jié)點(diǎn),可選擇下列“相位”(Phasing) 模式:
– 單相(2 個(gè)輸出)
– 雙相(2 個(gè)輸出)
– AB 正交相(2 個(gè)輸出)
– 單相(1 個(gè)輸出)
本程序單向單輸出控制,I/O 分配表
| 輸入 | 功能 |
| I0.0 | 正轉(zhuǎn) |
| I0.1 | 反轉(zhuǎn) |
| I1.4 | 機(jī)械手基準(zhǔn)傳感器 |
| 輸出 | 功能 |
| Q0.0 | 步進(jìn)電機(jī)驅(qū)動(dòng)器PUL |
| Q0.1 | 步進(jìn)電機(jī)驅(qū)動(dòng)器DIR |
| Q0.2 | 步進(jìn)電機(jī)驅(qū)動(dòng)器ENA |
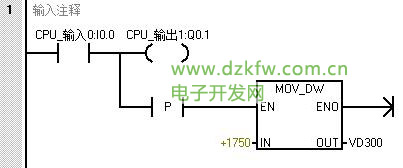
1750為步進(jìn)脈沖
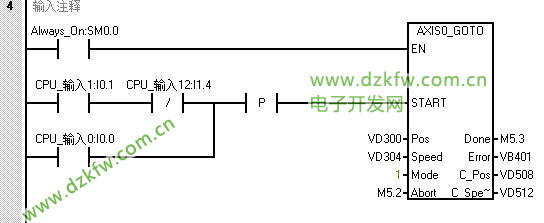
開啟步進(jìn)電機(jī)運(yùn)動(dòng)子列程

1000為速度
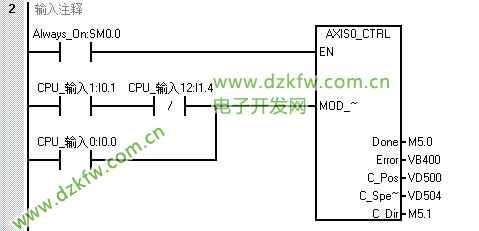
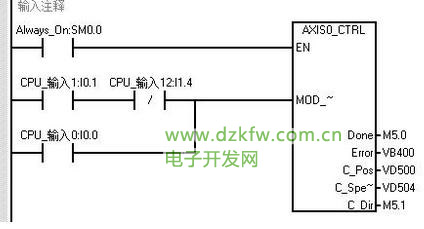
步進(jìn)電機(jī)運(yùn)動(dòng)控制
單項(xiàng)單脈沖就是給正脈沖它往正方向轉(zhuǎn),不給脈沖開啟運(yùn)動(dòng)軸往反方向轉(zhuǎn),轉(zhuǎn)到機(jī)械手基準(zhǔn)傳感器檢測(cè)到回到原位,關(guān)閉運(yùn)動(dòng)軸。注意I1.4為機(jī)械手基準(zhǔn)處傳感器。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底