
- ╚╬äı(w¿┤)├Þ╩÷
─│ã¾ÿI(y¿¿)│ðô·(d¿ín)┴╦Ê╗éÇ(g¿¿)ÖC(j¿®)ðÁ╩Í┐ÏÍã¤Á¢y(t¿»ng)ÈO(sh¿¿)Ëï(j¿¼)╚╬äı(w¿┤)ú¼Ê¬Ã¾Ë├ÖC(j¿®)ðÁ╩Íîó╣ñ╝■Ë╔A╠ÄÎÑ╚í▓óÀ┼Á¢B╠Äú¼ÖC(j¿®)ðÁ╩Í┐ÏÍã╩¥ÊÔêD╚þ¤┬êD╦¨╩¥íú

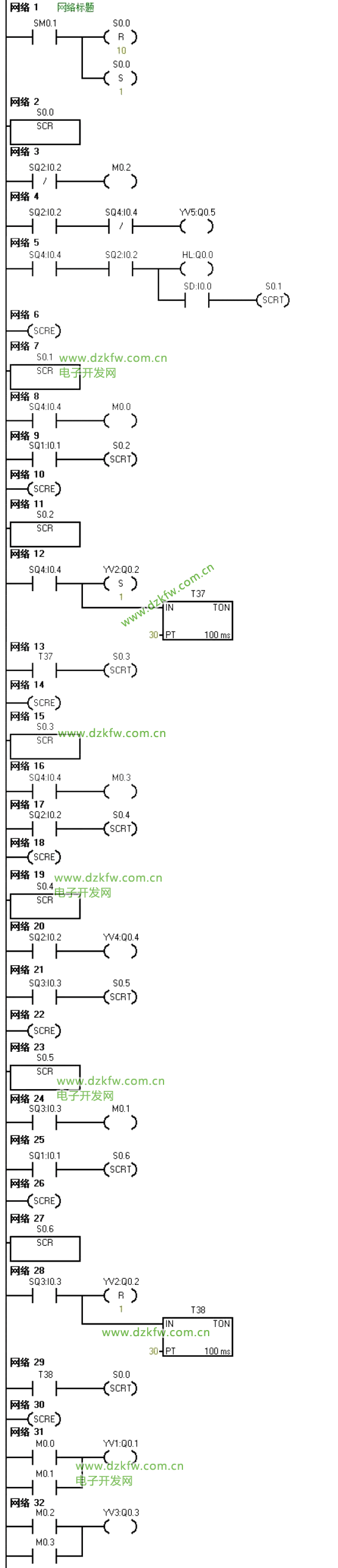
┐ÏÍãʬþú║ÖC(j¿®)ðÁ╩Í═úÈ┌│§╩╝á¯æB(t¿ñi)ú¼SQ4=SQ2=1ú¼SQ3=SQ1=0ú¼È¡╬╗Í©╩¥ƒ¶HL³c(di¿ún)┴┴ú¼░┤¤┬í░SB1í▒åóäË(d¿░ng)Ú_ÛP(gu¿ín)ú¼¤┬¢ÁÍ©╩¥ƒ¶YV1³c(di¿ún)┴┴ú¼ÖC(j¿®)ðÁ╩ͤ┬¢Áú¼ú¿SQ2=0ú®¤┬¢ÁÁ¢A╠Ä║¾ú¿SQ1=1ú®èA¥o╣ñ╝■ú¼èA¥oÍ©╩¥ƒ¶YV2³c(di¿ún)┴┴ú╗èA¥o╣ñ╝■║¾ú¼ÖC(j¿®)ðÁ╩Í╔¤╔²ú¿SQ1=0ú®ú¼╔¤╔²Í©╩¥ƒ¶YV3³c(di¿ún)┴┴ú¼╔¤╔²Á¢╬╗║¾ú¿SQ2=1ú®,ÖC(j¿®)ðÁ╩ÍËÊÊãú¿SQ4=0ú®,ËÊÊãÍ©╩¥ƒ¶YV4³c(di¿ún)┴┴ú╗ÖC(j¿®)ðÁ╩ÍËÊÊãÁ¢╬╗║¾ú¿SQ3=1ú®¤┬¢ÁÍ©╩¥ƒ¶YV1³c(di¿ún)┴┴ú¼ÖC(j¿®)ðÁ╩ͤ┬¢Áú╗ÖC(j¿®)ðÁ╩ͤ┬¢ÁÁ¢╬╗║¾ú¿SQ1=1ú®èA¥oÍ©╩¥ƒ¶YV2¤¿£þú¼ÖC(j¿®)ðÁ╩ÍÀ┼╦╔íúıê(q¿½ng)Ë├┐╔¥Ä│╠┐ÏÍãã¸ÈO(sh¿¿)Ëï(j¿¼)ãõ┐ÏÍã¤Á¢y(t¿»ng)▓óı{(di¿ño)Èçíú
- I/OÁÏÍÀÀÍ┼õ

- │╠ð‗(╠¦ð╬êDú®╬¸ÚTÎËS7-200 SMART PLCÁ─ÖC(j¿®)ðÁ╩Í┐ÏÍã┐ÏÍã¤Á¢y(t¿»ng)ÈO(sh¿¿)Ëï(j¿¼)
 ÀÁ╗ÏÝö▓┐
ÀÁ╗ÏÝö▓┐ ╦óð┬Ýô(y¿¿)├µ
╦óð┬Ýô(y¿¿)├µ ¤┬Á¢Ýô(y¿¿)ÁÎ
¤┬Á¢Ýô(y¿¿)ÁÎ