
▓Į▀MļŖÖC╩Ūį§śė╣żū„Ą─Ż┐╦³ėą──ą®╠ž³cŻ┐▓Į▀MļŖÖC╣żū„įŁ└Ē www.zhimadaxue.com/jichu/servo/9902.html
Ū░├µā╔Ų¬╬─š┬╬ęéāĮķĮB┴╦▓Į▀MļŖÖC║═▓Į▀M“īäėŲ„ĪŻ╬ęéāų¬Ą└Ż¼▓Į▀MļŖÖC▒Š╔Ēø]ėąĘ┤üčbų├Ż¼į┌ę╗ą®ąĶꬊ½┤_┐žųŲĄ─ł÷║ŽŻ¼▀ĆąĶę¬┼õ║ŽŠÄ┤aŲ„Ą╚Ę┤üčbų├üĒ╩╣ė├ĪŻ×ķ┴╦╩╣▒ŠĮ╠│╠Ė³┘NĮ³īŹļH╣ż│╠æ¬ė├Ż¼╬ęéāĄ─īŹ“×čbų├░▓čb┴╦į÷┴┐ą═ŠÄ┤aŲ„ĪŻ▀@Ų¬╬─š┬Ż¼╬ęéāŠ═üĒšJūRŽ┬į÷┴┐ą═ŠÄ┤aŲ„ĪŻ
▒Š╣Øšn│╠░³└©╚ńŽ┬ę╗ą®ā╚╚▌Ż║
3Īóį÷┴┐ą═ŠÄ┤aŲ„Ą─ĮYśŗ╝░╣żū„įŁ└ĒŻ╗
ŠÄ┤aŲ„Ą─ėó╬─├¹ĘQ×ķĪ░encoderĪ▒Ż¼╦³╩Ūę╗ĘN─▄░čŠÓļxŻ©ų▒ŠĆ╬╗ęŲŻ®║═ĮŪČ╚Ż©ĮŪ╬╗ęŲŻ®▐DōQ│╔ļŖą┼╠¢▓ó▌ö│÷Ą─é„ĖąŲ„ĪŻŠÄ┤aŲ„═©│Żė├ė┌╣żśI▀\äė┐žųŲųąąĶę¬£╩┤_┐žųŲ╬╗ų├Ą─ł÷║ŽĪŻ▒╚╚ńŻ¼ÖC┤▓ŽĄĮyųąŻ¼ė├▓Į▀MļŖÖC┐žųŲĄČŠ▀Ą─╬╗ų├Ż¼ė├ŠÄ┤aŲ„ī”īŹļH╬╗ų├▀MąąÖz£y▓óĘ┤üĪŻėą┴╦ŠÄ┤aŲ„Ż¼┐žųŲŽĄĮyŠ═─▄ą╬│╔ķ]ŁhĪŻ
Ž┬├µ▀@ÅłłD╩ŪÜW─Ę²łį÷┴┐ą═ŠÄ┤aŲ„E6B2-CWZ6CĄ─īŹ╬’łDŻ║

Ė∙ō■╣żū„įŁ└ĒĄ─▓╗═¼Ż¼ŠÄ┤aŲ„┐╔Ęų×ķ╣ŌļŖŠÄ┤aŲ„Ż©optical encoderŻ®Īó┤┼ąįŠÄ┤aŲ„Ż©magnetic encoderŻ®ĪóļŖĖą╩ĮŠÄ┤aŲ„Ż©inductive encoderŻ®║═ļŖ╚▌╩ĮŠÄ┤aŻ©capacitive encoderŻ®Ą╚Ą╚Ż¼╩╣ė├ūŅČÓĄ─╩Ū╣ŌļŖŠÄ┤aŲ„ĪŻ
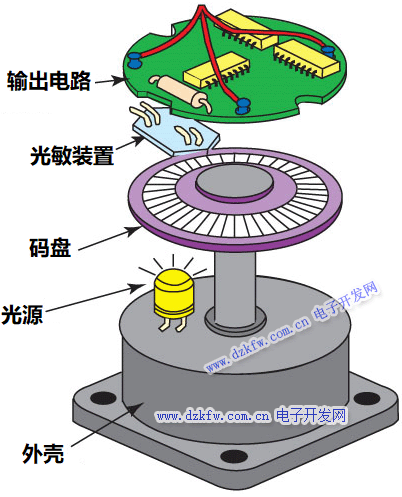
╣ŌļŖŠÄ┤aŲ„Ż©optical encoderŻ®Ą─ĮM│╔░³└©Ż║▀BĮė▌SŻ©ShaftŻ®Īó┤a▒PŻ©Code diskŻ®Īó╣Ōį┤Ż©Light SourceŻ®Īó▌ö│÷ļŖ┬ĘŻ©Output circuitŻ®╝░═ŌÜż║═▀BĮėĘ©╠mĄ╚Ż¼╚ńŽ┬łDŻ║
Ė∙ō■┤a▒PĮYśŗĄ─▓╗═¼Ż¼ŠÄ┤aŲ„ėų┐╔ęįĘų×ķį÷┴┐ą═ŠÄ┤aŲ„║═Į^ī”ųĄą═ŠÄ┤aŲ„ĪŻ
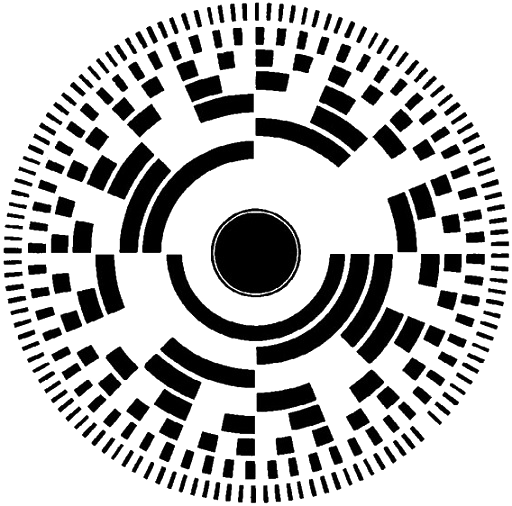
Į^ī”ųĄą═ŠÄ┤aŲ„Ż¼ėó╬─├¹ĘQ"Absolute encoder"Ż¼▌ö│÷Ą─╩Ūę╗ĮMČ■▀MųŲöĄĄ─ŠÄ┤aĪŻ╦³Ą─┤a▒P▒╗Ęų│╔║▄ČÓ═¼ą─Ą─═©Ą└Ż¼├┐ę╗éĆ═©Ą└Ż¼ĘQ×ķę╗éĆĪ░┤aĄ└Ī▒ĪŻ├┐ę╗éĆ┤aĄ└Č╝ėąę╗éĆå╬¬ÜĄ─▌ö│÷ļŖ┬ĘŻ¼ė├üĒ▒Ē╩Šę╗éĆČ■▀MųŲĄ─╬╗ĪŻ═©▀^Č■▀MųŲ╬╗Ą─ĮM║ŽŻ¼Š═─▄╬©ę╗┤_Č©ę╗éĆöĄųĄĪŻĮ^ī”ųĄą═ŠÄ┤aŲ„Ą─┤a▒P╚ńŽ┬łD╦∙╩ŠŻ║
į÷┴┐ą═ŠÄ┤aŲ„Ż¼ėó╬─├¹ĘQĪ░Incremental encoderĪ▒Ż¼╦³Ą─┤a▒P▒╗Ęų│╔┤¾ąĪŽÓĄ╚Ą─├„░ĄŽÓķgĄ─╣Ō¢┼Ż¼ļSų°┤a▒PĄ─▐DäėŻ¼Įė╩šČ╦Ģ■Öz£yĄĮ╣ŌĄ─0║═1Ą─ūā╗»Ż¼▓ó▐DōQ│╔ļŖ├}ø_ą┼╠¢Ž“═Ō▌ö│÷ĪŻ├}ø_ą┼╠¢▀BĮėĄĮĖ▀╦┘ėŗöĄŲ„─ŻēK╔ŽŻ¼═©▀^ī”├}ø_éĆöĄĄ─ėŗöĄŻ¼Š═─▄┤_Č©╬╗ęŲĄ─┤¾ąĪŻ©ę“×ķŠÄ┤aŲ„├┐▐Dę╗ų▄░l│÷Ą─├}ø_öĄ╩Ū╣╠Č©Ą─Ż®ĪŻ
į÷┴┐ą═ŠÄ┤aŲ„Ą─┤a▒P╚ńŽ┬łDŻ║

╔Ž╩÷┤a▒PĮYśŗų╗ėą1╚”╣Ō¢┼Ż¼į┌╩╣ė├ę╗┬Ę╣Ōį┤Ą─ŪķørŽ┬ų╗ėą1┬ĘļŖ├}ø_ą┼╠¢▌ö│÷Ż¼▀@═∙═∙▓╗─▄ØMūŃīŹļHę¬Ū¾Ż¼ę“×ķį┌īŹļHæ¬ė├ųą╬ęéā═∙═∙ąĶę¬Öz£yļŖÖC╩Ūš²▐D▀Ć╩ŪĘ┤▐DŻ¼ėąĢr║“▀ĆąĶę¬▀Mąą┴Ń³cÖz£yĪŻ
ę¬Öz£yš²Ę┤▐DŻ¼┐╔ęįėąā╔ĘNĘĮĘ©ĪŻ
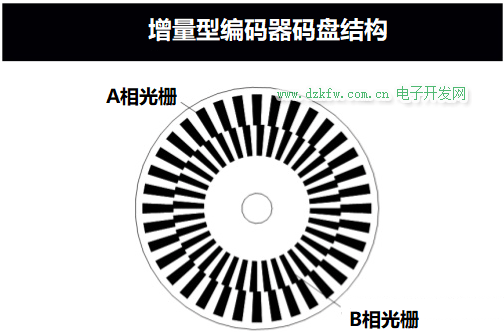
ĘĮĘ©ę╗Ż║╩╣ė├Š▀ėą1╚”╣Ō¢┼Ą─┤a▒P║═ā╔éĆ╣Ōį┤ĪŻ
═©▀^š{š¹┤a▒P╣Ō¢┼Ą─ķgĖ¶ŠÓļx╝░ā╔éĆ╣Ōį┤Ą─╬╗ų├Ż¼╩╣AŽÓą┼╠¢║═BŽÓą┼╠¢ŽÓ▓Ņ1/4ų▄Ų┌Ż©ŽÓ╬╗ĮŪ▓Ņ90Č╚Ż®Ż¼▀@śėŠ═┐╔ęį═©▀^┼ąöÓAŽÓą┼╠¢║═BŽÓą┼╠¢Ą─░l╔·Ēśą“üĒ┼ąöÓš²▐D▀Ć╩ŪĘ┤▐DĪŻįōĘĮĘ©Ą─╩ŠęŌłD╚ńŽ┬Ż║
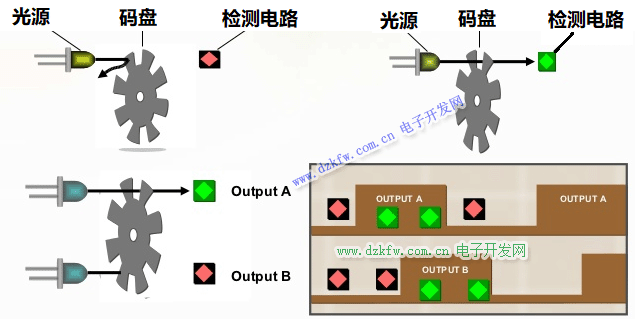
ĘĮĘ©Č■Ż║╩╣ė├Š▀ėą2╚”╣Ō¢┼Ą─┤a▒P║═1éĆ╣Ōį┤ĪŻ
įōĘĮĘ©╩╣ė├Š▀ėą2╚”╣Ō¢┼Ą─┤a▒PŻ¼═Ō╚”×ķAŽÓ╣Ō¢┼Ż¼ā╚╚”×ķBŽÓ╣Ō¢┼Ż¼ā╔╚”╣Ō¢┼ų«ķgķgĖ¶1/4īÆČ╚Ż¼╚ńŽ┬łD╦∙╩ŠŻ║
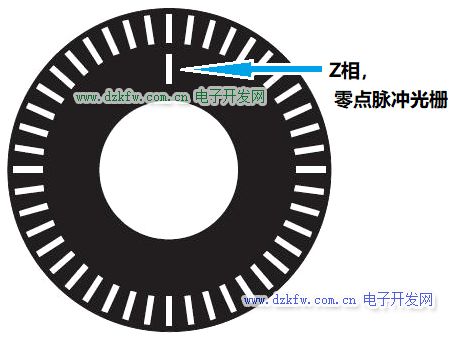
│²┴╦A/BŽÓŻ¼į┌īŹļHæ¬ė├ųąŻ¼ėąĄ─ŠÄ┤aŲ„▀Ć╠ß╣®┴Ń³c├}ø_ą┼╠¢ĪŻ┴Ń³c├}ø_ą┼╠¢╩Ūį┌┤a▒P╔Žį÷╝ėę╗éĆ═¼ą─Ą─╣Ō¢┼┐ūŻ¼├┐▐Dę╗╚”░l│÷ę╗éĆ├}ø_Ż¼Ųõ▌ö│÷ą┼╠¢ĘQ×ķZŽÓŻ©ZeroŻ®Ż¼╚ńŽ┬łDŻ║
▀@śėŻ¼į÷┴┐ą═ŠÄ┤aŲ„AŽÓ/BŽÓ/ZŽÓĄ─▌ö│÷ą┼╠¢╚ńŽ┬łD╦∙╩ŠŻ║

į÷┴┐ą═ŠÄ┤aŲ„▌ö│÷Ą─├}ø_ą┼╠¢ąĶę¬▀BĮėĄĮPLCĄ─Ė▀╦┘ėŗöĄŲ„ųąĪŻėąą®PLCĄ─CPU─ŻēK▒Š╔Ē╝»│╔┴╦Ė▀╦┘ėŗöĄŲ„Ż©▒╚╚ńŻ¼S7-200 SMARTĪóS7-1200ŽĄ┴ąŻ®Ż¼┐╔ęįīóŠÄ┤aŲ„Ą─▌ö│÷ą┼╠¢ų▒Įė▀BĮėĄĮCPU─ŻēK╝»│╔Ą─Ė▀╦┘ėŗöĄ═©Ą└ųąŻ╗ėąĄ─CPU▒Š╔Ēø]ėą╝»│╔Ė▀╦┘ėŗöĄŲ„Ż©▒╚╚ńS7-300/1500ŽĄ┴ąŻ®Ż¼▀@ĘNŪķørŽ┬ąĶę¬╩╣ė├īŻķTĄ─Ė▀╦┘ėŗöĄ─ŻēKĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū