
ę╗Īó▓Į▀MļŖÖC“īäėŲ„ĮėŠĆ
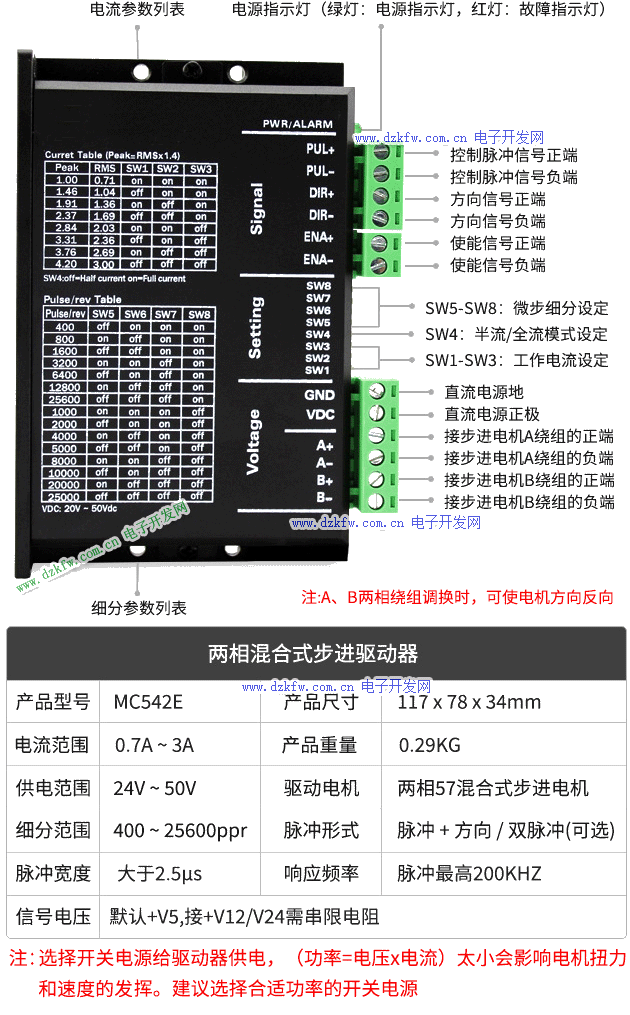
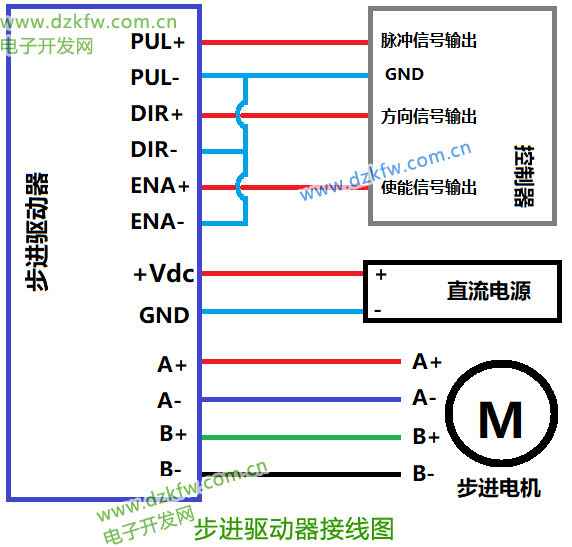
▓Į▀MļŖÖC“īäėŲ„Ą─ĮėŠĆĘŪ│Ż║åå╬Ż¼ų╗ąĶę¬░┤šš“īäėŲ„Ą─ĮėŠĆłD▀MąąĮėŠĆ╝┤┐╔ĪŻ
1.ų„ļŖį┤ĮėŠĆŻ║īóļŖį┤Ą─š²śO║═žōśOĮėĄĮDCļŖį┤Ą─š²śO║═žōśO╔ŽŻ¼ā╔š▀ų«ķg▀Ćę¬Įėę╗éĆĮėĄžŠĆŻ¼ĮėĄžŠĆĮėĄĮļŖį┤Ą─žōśO╔ŽĪŻ
2.▓Į▀MļŖÖCĮėŠĆŻ║īó▓Į▀MļŖÖCĄ─ĮėŠĆŠĆĮėĄĮ“īäėŲ„╔ŽŻ¼ĮėĄžŠĆĮėĄĮ“īäėŲ„Ą─GNDČ╦┐┌╔ŽĪŻ
3.┐žųŲŠĆĮėŠĆŻ║īó┐žųŲŠĆĮėĄĮ“īäėŲ„╔ŽŻ¼ĮėŠĆĘĮĘ©ę╗░Ń╩Ū┐žųŲŠĆĄ─š²śOĮėĄĮ“īäėŲ„Ą─š²śOŻ¼┐žųŲŠĆĄ─žōśOĮėĄĮ“īäėŲ„Ą─žōśOĪŻ
▓Į▀MļŖÖC“īäėŲ„ĮėŠĆČ╦ūė
Č■Īó▓Į▀MļŖÖC“īäėŲ„Ą─╣żū„įŁ└Ē
▓Į▀MļŖÖC“īäėŲ„╩Ūę╗ĘNīó├}ø_ą┼╠¢▐DōQ×ķļŖÖC▐DäėĄ─ļŖūėįOéõŻ¼╦³┐╔ęįī”▓Į▀MļŖÖCĄ─▐Däė╦┘Č╚Īó▓ĮŠÓ║═▓ĮöĄ▀MąąŠ½┤_┐žųŲĪŻ╦³Ą─╣żū„įŁ└Ē╩ŪŻ║«ö┐žųŲŲ„Įė╩šĄĮ├}ø_ą┼╠¢ĢrŻ¼Ģ■ęįę╗Č©Ą─Ņl┬╩«a╔·ę╗Č©Ą─ļŖŲĮūā╗»Ż¼╚╗║¾į┌ļŖ┬Ę░Õ╔Žīó▀@ę╗ą┼╠¢ūā╗»▐DōQ│╔ę╗ĘN┐╔ęį┐žųŲļŖÖC▐DäėĄ─ą┼╠¢Ż¼Å─Č°īŹ¼FļŖÖCĄ─▀\äė┐žųŲĪŻ
▓Į▀MļŖÖC“īäėŲ„Ą─╣żū„įŁ└Ēų„ę¬Ęų×ķ╚²éĆ▓Į¾EŻ║
1.┐žųŲŲ„Įė╩š├}ø_ą┼╠¢Ż║«ö┐žųŲŲ„Įė╩šĄĮ├}ø_ą┼╠¢ĢrŻ¼Ģ■ęįę╗Č©Ą─Ņl┬╩«a╔·ę╗Č©Ą─ļŖŲĮūā╗»ĪŻ
2.├}ø_ą┼╠¢▐DōQŻ║į┌ļŖ┬Ę░Õ╔Žīó▀@ę╗ą┼╠¢ūā╗»▐DōQ│╔ę╗ĘN┐╔ęį┐žųŲļŖÖC▐DäėĄ─ą┼╠¢ĪŻ
3.┐žųŲļŖÖC▐DäėŻ║▓Į▀MļŖÖC“īäėŲ„Įė╩šĄĮ▐DōQ║¾Ą─ą┼╠¢ęį║¾Ż¼Ė∙ō■ą┼╠¢Ą─▓╗═¼Ż¼┐╔ęį┐žųŲļŖÖCĄ─▐DäėĘĮŽ“Īó▐Däė▓ĮŠÓ║═▐Däė╦┘Č╚Ż¼Å─Č°īŹ¼FļŖÖCĄ─▀\äė┐žųŲĪŻ▓Į▀MļŖÖC“īäėŲ„Ą─ā׳c╩ŪĮYśŗ║åå╬Īó┐╔┐┐ąįĖ▀Īó┐žųŲĘĮ▒ŃŻ¼▀Ć┐╔ęįīŹ¼FĖ„ĘNÅ═ļsĄ─▀\äė┐žųŲŻ¼╩Ū╣żśIūįäė╗»┐žųŲŅIė“ųąĄ─ųžę¬įOéõĪŻ
╚²Īó╚²┴ŌPLC┐žųŲ▓Į▀MļŖÖC└²ūė
║▄ČÓąĪ╗’░ķäéĮėė|▓Į▀MļŖÖCŻ¼▓Į▀MļŖÖC“īäėŲ„Ż¼║▄ėą┐╔─▄ī”ė┌▓Į▀MļŖÖCĮėŠĆĘĮĘ©║═▓Į▀MļŖÖCĮėŠĆłD┼¬▓╗├„░ūŻ¼╦∙ęį┐╔─▄¤oÅ─Ž┬╩ųĪŻŽ┬├µ▀@Ų¬╬─š┬ūī─·┐ņ╦┘šŲ╬š▓Į▀MļŖÖCĄ─ĮėŠĆĘĮĘ©Ż¼╚²ÅłīŹė├Ą─▓Į▀MļŖÖCĮėŠĆłDĮ╠─Ń┐ņ╦┘ĮŌøQĪŻ
╩ūŽ╚Ż¼╬ęéāüĒ┐┤┐┤▀BĮė▓Į▀MļŖÖCĮėŠĆĘĮĘ©ĪŻ
Ą┌Č■▓ĮŻ¼▀BĮė▓Į▀MļŖÖC“īäėŲ„Ą─ļŖį┤Ż¼╚ń╣¹į┌╬ęéāĄ─▓Į▀MļŖÖC╩╣ė├ų▒┴„24V╣®ļŖ┐╔ęį┼c▒Ē┐ž╣▓ė├ę╗éĆķ_ĻPļŖį┤üĒ╣®ļŖĪŻ
Ą┌╚²▓ĮŻ¼üĒ┐┤ę╗Ž┬▀BĮė▓Į▀MļŖÖC“īäėŲ„┼c▒Ē┐žĄ─┐žųŲĮėŠĆŻ║
1Īóīó▓Į▀MļŖÖC“īäėŲ„├}ø_▌ö╚ļą┼╠¢║═ĘĮŽ“▌ö╚ļą┼╠¢Ą─š²śO▀BĮėĄĮ▒Ē┐žĄ─5VČ╦ūėĪŻ
2Īóīó▓Į▀MļŖÖC“īäėŲ„├}ø_▌ö╚ļą┼╠¢Ą─žōČ╦▀BĮėĄĮ▒Ē┐žĄ─Y1▌ö│÷Č╦ūė╔ŽĪŻ
3Īóīó▓Į▀MļŖÖC“īäėŲ„ĘĮŽ“▌ö╚ļą┼╠¢Ą─žōČ╦▀BĮėĄĮ▒Ē┐žĄ─Y2▌ö│÷Č╦ūė╔ŽĪŻ
4ĪóĮėŽ┬üĒŠ═╩ŪįOų├▓Į▀MļŖÖC“īäėŲ„Ą─╝ÜĘųŻ¼ę╗░Ń┐╔ęįĘ┼į┌8Ż©1600Ż®ū¾ėęŻ¼═©▀^│§▓Įš{įć║¾įOų├īŹļHąĶꬥ─╝ÜĘųĪŻ
5ĪóįOų├▓Į▀MļŖÖCĄ─š²▐DįOų├Ż¼ģó┐╝įOų├Ż¼ę╗ąąīŹ¼Fš²▐DĪŻX1╩Ūš²▐DĄ─åóäėķ_ĻPĪŻ
6Īó▓Į▀MļŖÖCĘ┤▐DĄ─įOų├Ż║X2╩ŪĘ┤Ž“åóäėķ_ĻPŻ¼Y1▌ö│÷├}ø_Ż¼Y2▌ö│÷ĘĮŽ“ą┼╠¢ĪŻā╔ąąīŹ¼FĘ┤▐Däėū„ĪŻ
║├┴╦Ż¼ąĪŠÄ├Ķ╩÷┴╦▓Į▀MļŖÖCĮėŠĆ║═ūŅ╗∙▒ŠĄ─įOų├ĘĮĘ©Š═ĄĮ▀@└’Ėµę╗Č╬┬õ┴╦Ż¼ę╗░ŃŪķør▒ŻūCĮėŠĆš²┤_Ż¼Ą½╩Ūę¬╠žäeūóęŌĄ─╩ŪļŖį┤Ą─śOąįŻ¼įOų├š²┤_Š═┐╔ęįš²│Ż▀\ąąĪŻ
Š▀¾wīŹ└²╚ńŽ┬Ż║
╚²┴ŌPLC┐žųŲ▓Į▀MļŖÖCĄ─╠▌ą╬łD║═ĮėŠĆĘĮ╩ĮĪżĪżĪżPLCą═╠¢FX2NŻ¼▓Į▀MļŖÖC─▄ē“š²Ę┤▐DÄūéĆę¬³cŻ║
1Ż¼─Ńę¬ų¬Ą└▓Į▀M±R▀_Ą─╣żū„įŁ└ĒĪŻ
┐žųŲĘĮ╩Į╩Ū├}ø_┐žųŲŻ¼Č°▓╗╩ŪļŖŲĮ┐žųŲŻ╗
┐žųŲą┼╠¢ę╗░Ń×ķĄ═ļŖŲĮą┼╠¢Ż¼Č°▓╗╩ŪĖ▀ļŖŲĮŻ╗
Č╚┴┐å╬╬╗Ż¼ę▓Š═╩Ū╚ń║╬║Ō┴┐▓Į▀M±R▀_ąąū▀Ą─ŠÓļx---▓Į▀MĮŪŻ¼Š═╩Ūę╗éĆ├}ø_±R▀_▐DäėĄ─ĮŪČ╚ĪŻ▓Į▀M±R▀_Ą─▓Į▀MĮŪę╗░Ń×ķ1.8ĪŃĪŻ0.9ĪŃŻ¼0.72ĪŃŻ¼0.36ĪŃŻ¼0.0288ĪŃŻ¼Ą╚Ą╚ĪŻ▓Į▀MĮŪįĮąĪŻ¼ät▓Į▀M±R▀_Ą─┐žųŲŠ½Č╚įĮĖ▀ĪŻ╬ęéāĖ∙ō■▓Į▀MĮŪ┐╔ęį┐žųŲ±R▀_ąąū▀Ą─Š½┤_ŠÓļxĪŻ▒╚╚ńšfŻ¼▓Į▀MĮŪ0.72ĪŃŻ¼±R▀_ą²▐Dę╗ų▄ąĶꬥ─├}ø_öĄ×ķ360/0.72=500├}ø_Ż¼ę▓Š═╩Ūī”▓Į▀M±R▀_“īäėŲ„░l│÷500éĆ├}ø_ą┼╠¢Ż¼±R▀_▓┼ą²▐Dę╗ų▄ĪŻ
╦∙ęįŻ¼Ė∙ō■ęį╔Ž▓Į▀M±R▀_Ą─╣żū„įŁ└ĒŻ¼─ŃąĶę¬▀xō±║Ž▀mĄ─PLCĪŻ─Ńė├FX2NĄ─PLCŻ¼ąĶę¬ųŲČ©×ķMTŠ¦¾w╣▄ą═Ż¼MR×ķ└^ļŖŲ„ą═Ż¼▓╗┐╔ęį░lĖ▀╦┘├}ø_Ż¼╦∙ęį▒žĒÜė├MTą═ĪŻ
2Ż¼ų┴ė┌ĮėŠĆłDŻ¼─Ńę¬ų¬Ą└FX2NĄ─PLCūŅČÓ░lā╔┬Ę├}ø_Ż¼├}ø_┐┌×ķY0║═Y1Ż¼Ņl┬╩×ķ20KHZĪŻ
ĖĮłD╚ńŽ┬Ż║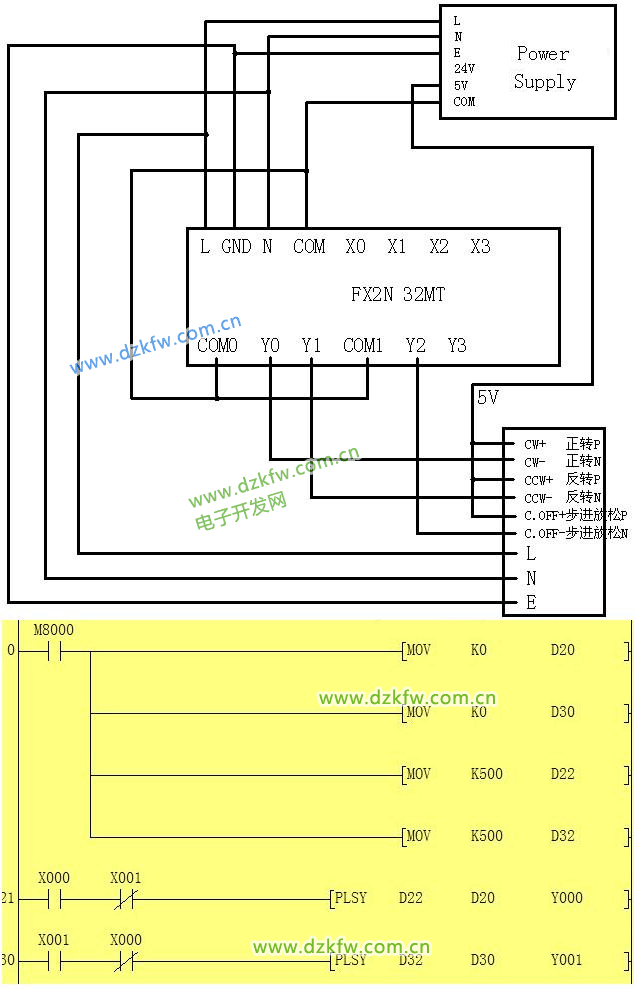
3Ż¼ų┴ė┌│╠ą“Ą─įÆŻ¼┐┤─ŃĄ─ę¬Ū¾Ż¼╩Ūūįäėš²Ę┤▐D▀Ć╩Ū╩ųäė┐žųŲš²Ę┤▐DĪŻæ¬ė├PLSYųĖ┴Ņ┐žųŲ▓Į▀M╦┘Č╚║═ąąū▀ŠÓļxĪŻ─Ńūį╝║īæīæ┐┤Ż¼▓╗ąąĮo╬ę┴¶Ž┬Ó]Žõ║═┐žųŲę¬Ū¾
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū