
Ųš═©ėŗöĄŲ„Ą─ėŗöĄ╦┘Č╚┼cPLCĄ─Æ▀├Ķų▄Ų┌ėąĻPŻ¼Æ▀├Ķų▄Ų┌įĮķLŻ¼ėŗöĄ╦┘Č╚įĮ┬²Ż¼╝┤ėŗöĄŅl┬╩įĮĄ═Ż¼ę╗░ŃāH×ķÄū╩«║šŲØŻ¼ę“Č°Ųš═©ėŗöĄŲ„▀mė├ė┌ėŗöĄ╦┘Č╚ę¬Ū¾▓╗Ė▀Ą─ł÷║ŽĪŻ
×ķ┴╦ØMūŃĖ▀╦┘ėŗöĄę¬Ū¾Ż¼S7-200 SMART PLCīŻķTįOėŗ┴╦Ė▀╦┘ėŗöĄŲ„Ż¼ŲõėŗöĄ╦┘Č╚║▄┐ņŻ¼Cą═CPU(CR40ĪóCR60)Ą─ėŗöĄŅl┬╩ūŅĖ▀×ķ100kHzŻ¼Są═CPU(SR20ĪóST20ĪŁĪŁSR60ĪóST60)ūŅĖ▀ėŗöĄŅl┬╩▀_200kHzŻ¼Š∙▓╗╩▄PLCÆ▀├Ķų▄Ų┌Ą─ė░ĒæĪŻ
╬„ķTūėS7-200 SMART PLCų¦│ųHSC0Ī½HSC3╦─éĆĖ▀╦┘ėŗöĄŲ„Ż¼Ė▀╦┘ėŗöĄŲ„ėą0Īó1Īó3Īó4Īó6Īó7Īó9Īó10╣▓░╦ĘNėŗöĄ─Ż╩ĮŻ¼HSC0 ║═ HSC2 ų¦│ų░╦ĘNėŗöĄ─Ż╩Į(─Ż╩Į 0Īó1Īó3Īó4Īó6Īó7Īó9║═10)Ż¼HSC1 ║═ HSC3 ų╗ų¦│ųę╗ĘNėŗöĄ─Ż╩Į(─Ż╩Į 0)ĪŻ
ę╗ĪóĖ▀╦┘ėŗöĄŲ„ųĖ┴Ņšf├„
╬„ķTūėPLC Ė▀╦┘ėŗöĄŲ„ųĖ┴Ņ░³└©Ė▀╦┘ėŗöĄŲ„Č©┴xųĖ┴Ņ(HDEF)║═Ė▀╦┘ėŗöĄŲ„ųĖ┴Ņ(HSC)ĪŻ
Ė▀╦┘ėŗöĄŲ„ųĖ┴Ņšf├„╚ń▒Ē6-61╦∙╩ŠĪŻ
▒Ē6-61 Ė▀╦┘ėŗöĄŲ„ųĖ┴Ņšf├„

Č■ĪóĖ▀╦┘ėŗöĄŲ„Ą─ėŗöĄ─Ż╩Į
S7-200 SMART PLCĖ▀╦┘ėŗöĄŲ„ėą░╦ĘNėŗöĄ─Ż╩ĮŻ║─Ż╩Į0║═1(ā╚▓┐┐žųŲĘĮŽ“Ą─å╬ŽÓ╝ė/£pėŗöĄ)Ż¼─Ż╩Į1Š▀ėą═Ō▓┐Å═╬╗╣”─▄;─Ż╩Į3║═4(═Ō▓┐┐žųŲĘĮŽ“Ą─å╬ŽÓ╝ė/£pėŗöĄ)Ż¼─Ż╩Į4Š▀ėą═Ō▓┐Å═╬╗╣”─▄;─Ż╩Į6║═7(ļpŽÓ├}ø_▌ö╚ļĄ─╝ė/£pėŗöĄ)Ż¼─Ż╩Į7Š▀ėą═Ō▓┐Å═╬╗╣”─▄;─Ż╩Į9║═10(ļpŽÓ├}ø_▌ö╚ļĄ─š²Į╗╝ė/£pėŗöĄ)Ż¼─Ż╩Į10Š▀ėą═Ō▓┐Å═╬╗╣”─▄ĪŻ
1.─Ż╩Į0║═1(ā╚▓┐┐žųŲĘĮŽ“Ą─å╬ŽÓ╝ė/£pėŗöĄ)į┌─Ż╩Į0║═1ĢrŻ¼ų╗ėąę╗┬Ę├}ø_▌ö╚ļŻ¼ėŗöĄŲ„Ą─ėŗöĄĘĮŽ“(╝┤╝ėėŗöĄ╗“£pėŗöĄ)ė╔PLC╠žČ©SM┤µā”Ų„─│╬╗ųĄüĒøQČ©Ż¼įō╬╗ųĄ×ķ1Ģr×ķ╝ėėŗöĄŻ¼įō╬╗ųĄ×ķ0Ģr×ķ£pėŗöĄĪŻ─Ż╩Į0║═1šf├„╚ńłD6-47╦∙╩ŠŻ¼ęįĖ▀╦┘ėŗöĄŲ„HSC0×ķ└²Ż¼╦³▓╔ė├I0.0Č╦ūė×ķėŗöĄ├}ø_▌ö╚ļČ╦Ż¼SM37.3Ą─╬╗ųĄøQČ©ėŗöĄĘĮŽ“Ż¼SMD42ė├ė┌īæ╚ļėŗöĄŅAįOųĄĪŻ«öĖ▀╦┘ėŗöĄŲ„Ą─ėŗöĄųĄ▀_ĄĮŅAįOųĄĢrĢ■«a╔·ųąöÓšłŪ¾Ż¼ė|░lųąöÓ│╠ą“Ą─ł╠ąąĪŻ
─Ż╩Į0║═1Ą─ģ^äeį┌ė┌─Ż╩Į1Š▀ėą═Ō▓┐Å═╬╗╣”─▄Ż¼┐╔ęį═©▀^PLC╠žČ©Ą─▌ö╚ļČ╦ūė▌ö╚ļÅ═╬╗ą┼╠¢īóėŗöĄŲ„Å═╬╗Ż¼─Ż╩Į0¤o┤╦╣”─▄ĪŻ─Ż╩Į0║═1ūŅ┤¾į╩įS▌ö╚ļ├}ø_Ņl┬╩×ķ200kHz(S ą═CPU)║═100kHz(Cą═CPU)ĪŻ

łD6-47 ─Ż╩Į0║═1(ā╚▓┐┐žųŲĘĮŽ“Ą─å╬ŽÓ╝ė/£pėŗöĄ)šf├„
2.─Ż╩Į3║═4(═Ō▓┐┐žųŲĘĮŽ“Ą─å╬ŽÓ╝ė/£pėŗöĄ)
į┌─Ż╩Į3║═4ĢrŻ¼ų╗ėąę╗┬Ę├}ø_▌ö╚ļŻ¼ėŗöĄŲ„Ą─ėŗöĄĘĮŽ“ė╔PLC╠žČ©▌ö╚ļČ╦ūėĄ─▌ö╚ļųĄüĒøQČ©Ż¼įō▌ö╚ļųĄ×ķ1Ģr×ķ╝ėėŗöĄŻ¼įō▌ö╚ļųĄ×ķ0Ģr×ķ£pėŗöĄĪŻ─Ż╩Į3║═4šf├„╚ńłD6-48╦∙╩ŠŻ¼ęįĖ▀╦┘ėŗöĄŲ„HSC4×ķ└²Ż¼╦³▓╔ė├I0.3Č╦ūėū„×ķėŗöĄ├}ø_▌ö╚ļČ╦Ż¼I0.4Č╦ūė▌ö╚ļųĄøQČ©ėŗöĄĘĮŽ“Ż¼SMD152ė├ė┌īæ╚ļėŗöĄŅAįOųĄĪŻ
─Ż╩Į3║═4Ą─ģ^äeį┌ė┌─Ż╩Į4Š▀ėą═Ō▓┐Å═╬╗╣”─▄Ż¼┐╔ęį═©▀^PLC╠žČ©Ą─▌ö╚ļČ╦ūė▌ö╚ļÅ═╬╗ą┼╠¢īóėŗöĄŲ„Å═╬╗Ż¼─Ż╩Į3¤o┤╦╣”─▄ĪŻ─Ż╩Į3║═4ūŅ┤¾į╩įS▌ö╚ļ├}ø_Ņl┬╩×ķ200kHz(S ą═CPU)║═100kHz(C ą═CPU)ĪŻ

łD6-48 ─Ż╩Į3║═4(═Ō▓┐┐žųŲĘĮŽ“Ą─å╬ŽÓ╝ė/£pėŗöĄ)šf├„
3.─Ż╩Į6║═7(ļpŽÓ├}ø_▌ö╚ļĄ─╝ė/£pėŗöĄ)
į┌─Ż╩Į6║═7ĢrŻ¼ėąā╔┬Ę├}ø_▌ö╚ļČ╦Ż¼ę╗┬Ę×ķ╝ėėŗöĄ▌ö╚ļČ╦Ż¼┴Ēę╗┬Ę×ķ£pėŗöĄ▌ö╚ļČ╦ĪŻ─Ż╩Į6║═7šf├„╚ńłD6-49╦∙╩ŠŻ¼ęįĖ▀╦┘ėŗöĄŲ„HSC0×ķ└²Ż¼«öŲõ╣żū„─Ż╩Į×ķ6ĢrŻ¼╦³▓╔ė├I0.0Č╦ūėū„×ķ╝ėėŗöĄ├}ø_▌ö╚ļČ╦Ż¼I0.1×ķ£pėŗöĄ├}ø_▌ö╚ļČ╦Ż¼SMD42ė├ė┌īæ╚ļėŗöĄŅAįOųĄĪŻ
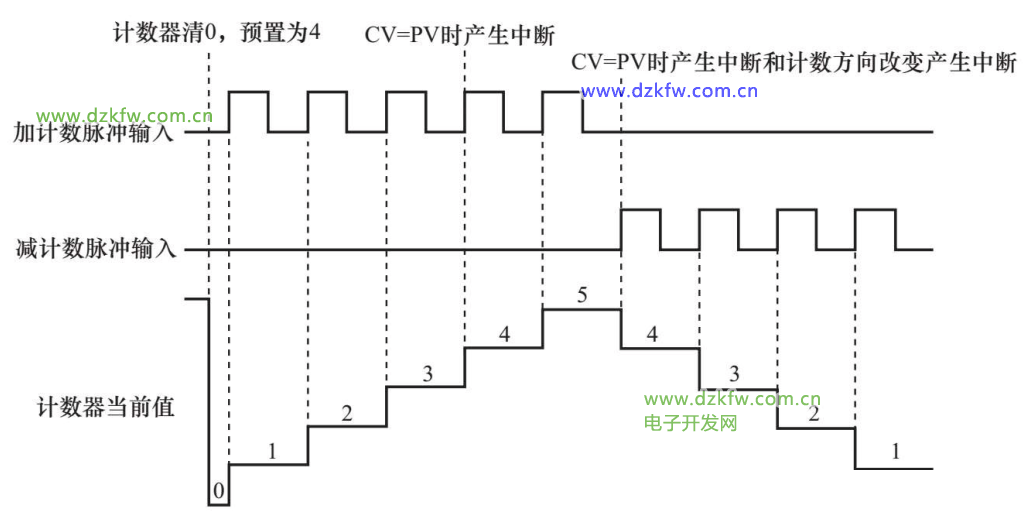
łD6-49 ─Ż╩Į6║═7(ļpŽÓ├}ø_▌ö╚ļĄ─╝ė/£pėŗöĄ)šf├„
─Ż╩Į6║═7Ą─ģ^äeį┌ė┌─Ż╩Į7Š▀ėą═Ō▓┐Å═╬╗╣”─▄Ż¼┐╔ęį═©▀^PLC╠žČ©Ą─▌ö╚ļČ╦ūė▌ö╚ļÅ═╬╗ą┼╠¢īóėŗöĄŲ„Å═╬╗Ż¼─Ż╩Į6¤o┤╦╣”─▄ĪŻ─Ż╩Į6║═7ūŅ┤¾į╩įS▌ö╚ļ├}ø_Ņl┬╩×ķ100 kHz(S ą═CPU)║═50 kHz(C ą═CPU)ĪŻ
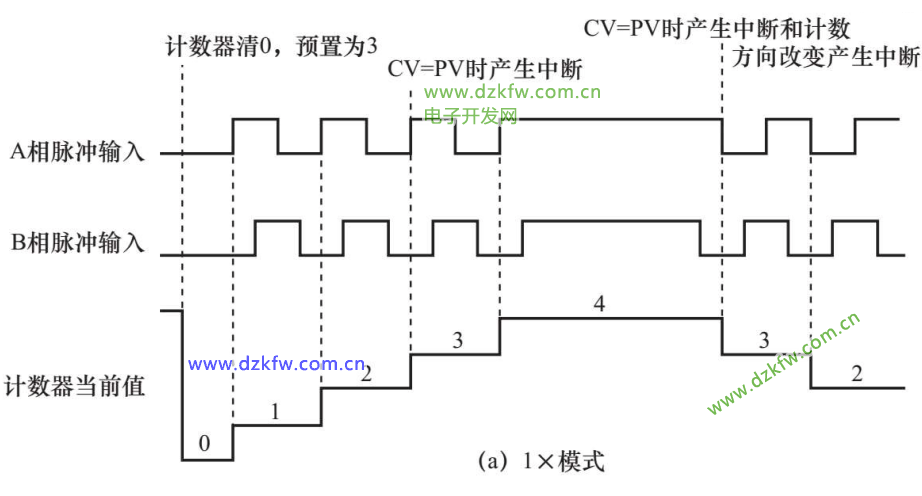
4.─Ż╩Į9║═10(ļpŽÓ├}ø_▌ö╚ļĄ─š²Į╗╝ė/£pėŗöĄ)
į┌─Ż╩Į9║═10ĢrŻ¼ėąā╔┬Ę├}ø_▌ö╚ļČ╦Ż¼ę╗┬Ę×ķA├}ø_▌ö╚ļČ╦Ż¼┴Ēę╗┬Ę×ķB├}ø_▌ö╚ļČ╦Ż¼AĪóB├}ø_ŽÓ╬╗ŽÓ▓Ņ90ĪŃ(╝┤š²Į╗Ż¼AĪóBā╔├}ø_ŽÓ▓Ņ1/4ų▄Ų┌)ĪŻ╚¶A├}ø_│¼Ū░B├}ø_90ĪŃŻ¼ät×ķ╝ėėŗöĄ;╚¶A├}ø_£■║¾B├}ø_90ĪŃŻ¼ät×ķ£pėŗöĄĪŻį┌▀@ĘNėŗöĄ─Ż╩ĮŽ┬Ż¼┐╔▀xō±1Ī┴ĘĮ╩Į╗“4Ī┴ĘĮ╩ĮŻ¼1Ī┴─Ż╩ĮėųĘQå╬▒ČŅlĘĮ╩ĮŻ¼«ö▌ö╚ļę╗éĆ├}ø_ĢrėŗöĄŲ„ųĄį÷1╗“£p1;4Ī┴─Ż╩ĮėųĘQ╦─▒ČŅlĘĮ╩ĮŻ¼«ö▌ö╚ļę╗éĆ├}ø_ĢrėŗöĄŲ„ųĄį÷4╗“£p4ĪŻ─Ż╩Į9║═10Ą─1Ī┴ĘĮ╩Į║═4Ī┴ĘĮ╩Įšf├„╚ńłD6-50╦∙╩ŠĪŻ
─Ż╩Į9║═10Ą─ģ^äeį┌ė┌─Ż╩Į10Š▀ėą═Ō▓┐Å═╬╗╣”─▄Ż¼┐╔ęį═©▀^PLC╠žČ©Ą─▌ö╚ļČ╦ūė▌ö╚ļÅ═╬╗ą┼╠¢īóėŗöĄŲ„Å═╬╗Ż¼─Ż╩Į9¤o┤╦╣”─▄ĪŻį┌─Ż╩Į9║═10ĢrŻ¼ Są═ CPUĄ─ūŅ┤¾į╩įS▌ö╚ļ├}ø_Ņl┬╩×ķ100kHz(1Ī┴ĘĮ╩ĮĢr)║═400kHz(4Ī┴ĘĮ╩ĮĢr)Ż¼Cą═ CPUĄ─ūŅ┤¾į╩įS▌ö╚ļ├}ø_Ņl┬╩×ķ50kHz(1Ī┴ĘĮ╩ĮĢr)║═400kHz(4Ī┴ĘĮ╩ĮĢr)ĪŻ

łD6-50 ─Ż╩Į9║═10(ļpŽÓ├}ø_▌ö╚ļĄ─š²Į╗╝ė/£pėŗöĄ)šf├„
╚²ĪóĖ▀╦┘ėŗöĄŲ„Ęų┼õĄ─▌ö╚ļČ╦ūė╝░į┌Ė„╣żū„─Ż╩ĮŽ┬Ą─╣”─▄
Ė▀╦┘ėŗöĄŲ„╣żū„ĢrąĶę¬╩╣ė├ę╗ą®▌ö╚ļČ╦ūėŻ¼HSC0Ī½HSC3Ė▀╦┘ėŗöĄŲ„Ęų┼õĄ─▌ö╚ļČ╦ūė╝░į┌▓╗═¼╣żū„─Ż╩ĮŽ┬Č╦ūėĄ─╣”─▄ęŖ▒Ē6-62ĪŻ═¼ę╗éĆ▌ö╚ļČ╦ūė▓╗─▄ė├ė┌ā╔ĘN▓╗═¼Ą─╣”─▄Ż¼Ą½╩Ū╚╬║╬ę╗éĆø]ėą▒╗Ė▀╦┘ėŗöĄŲ„«öŪ░─Ż╩Į╩╣ė├Ą─▌ö╚ļČ╦ūėŻ¼Š∙┐╔ęįė├ū„Ųõ╦¹ė├═ŠĪŻ└²╚ńŻ¼HSC0ėŗöĄŲ„╣żū„į┌─Ż╩Į1ĢrŻ¼Ģ■Ęų┼õš╝ė├I0.0Č╦ūėė├ė┌├}ø_▌ö╚ļŻ¼I0.4Č╦ūėė├ė┌Å═╬╗ą┼╠¢▌ö╚ļŻ¼I0.1Č╦ūėį┌─Ż╩Į1Ģr╬┤╩╣ė├Ż¼┐╔ęįė├ū„HSC1ėŗöĄŲ„╣żū„į┌─Ż╩Į0ĢrĄ─├}ø_▌ö╚ļČ╦ūėĪŻ
▒Ē6-62 HSC0Ī½HSC3Ė▀╦┘ėŗöĄŲ„Ęų┼õĄ─▌ö╚ļČ╦ūė╝░į┌▓╗═¼╣żū„─Ż╩ĮŽ┬Č╦ūėĄ─╣”─▄

╦─ĪóĖ▀╦┘ėŗöĄŲ„▌ö╚ļČ╦ūė×V▓©ĢrķgĄ─įOų├
ė╔ė┌PLC╩╣ė├Ģr┤¾ČÓöĄŪķørŽ┬▌ö╚ļą┼╠¢Ņl┬╩▌^Ą═Ż¼×ķ┴╦ęųųŲĖ▀Ņlą┼╠¢Ą─Ė╔ö_Ż¼▌ö╚ļČ╦ūėĄ──¼šJ×V▓©Ģrķg×ķ6.4msŻ¼įō×V▓©Ģrķg▌^ķLŻ¼ūŅĖ▀ų╗į╩įS78Hzą┼╠¢▌ö╚ļĪŻ╚ń╣¹ę¬īó─│ą®Č╦ūėė├ė┌Ė▀╦┘ėŗöĄŲ„▌ö╚ļŻ¼ąĶę¬īó▀@ą®Č╦ūėĄ─×V▓©ĢrķgįOČ╠ĪŻ▒Ē6-63┴ą│÷┴╦PLC▌ö╚ļČ╦ūė×V▓©Ģrķg┼cī”æ¬Ą─ūŅ┤¾Öz£yŅl┬╩ĪŻ
▒Ē6-63 PLC▌ö╚ļČ╦ūė×V▓©Ģrķg┼cī”æ¬Ą─ūŅ┤¾Öz£yŅl┬╩

ūóŻ║1.Są═╠¢CPU░³└©SR20ĪóST20ĪóSR30ĪóST30ĪóSR40ĪóST40ĪóSR60ĪóST60ĪŻ
2.Cą═╠¢CPU░³└©CR40ĪóCR60ĪŻ
į┌STEP 7-Micro/WIN SMART▄ø╝■ųą┐╔ęįįOų├(ĮMæB)PLC▌ö╚ļČ╦ūėĄ─×V▓©ĢrķgŻ¼įOų├▓┘ū„╚ńłD6-51╦∙╩ŠĪŻį┌ĒŚ─┐ųĖ┴Ņśõģ^ė“ļpō¶Ī░ŽĄĮyēKĪ▒Ż¼ÅŚ│÷Ī░ŽĄĮyēKĪ▒ī”įÆ┐“;į┌ī”įÆ┐“╔ŽĘĮ▀xųąCPU─ŻēKŻ¼į┌ū¾▀ģ▀xō±öĄūų┴┐▌ö╚ļĒŚā╚Ą─I0.0Ī½I0.7Ż¼╚╗║¾į┌ėę▀ģī”Ė▀╦┘ėŗöĄŲ„╩╣ė├Ą─Č╦ūė▀Mąą×V▓©ĢrķgįOų├;Ž╚╣┤▀xČ╦ūė┼įĪ░├}ø_▓ČūĮĪ▒▀xĒŚŻ¼į┘Ė∙ō■ėŗöĄ┐╔─▄Ą─ūŅ┤¾Ņl┬╩üĒ▀xō±║Ž▀mĄ─×V▓©ĢrķgŻ¼▓╗ė├ū„Ė▀╦┘ėŗöĄŲ„Ą─▌ö╚ļČ╦ūė×V▓©Ģrķg▒Ż│ų─¼šJųĄ;å╬ō¶Ī░┤_Č©Ī▒░┤ŌoĻPķ]Ī░ŽĄĮyēKĪ▒ī”įÆ┐“Ż¼īóŽĄĮyēKŽ┬▌dĄĮCPU─ŻēK╝┤┐╔╩╣×V▓©ĢrķgįOų├╔·ą¦ĪŻ

łD6-51 į┌ŠÄ│╠▄ø╝■Ą─ŽĄĮyēKā╚įOų├▌ö╚ļČ╦ūėĄ─×V▓©Ģrķg
╬ÕĪóĖ▀╦┘ėŗöĄŲ„Ą─┐žųŲūų╣Ø
Ė▀╦┘ėŗöĄŲ„Č©┴xHDEFųĖ┴Ņų╗─▄ūī─│ŠÄ╠¢Ą─Ė▀╦┘ėŗöĄŲ„╣żū„į┌─│ĘN─Ż╩ĮŻ¼¤oĘ©įOų├ėŗöĄŲ„Ą─ĘĮŽ“ĪóÅ═╬╗Ą╚ā╚╚▌ĪŻ×ķ┤╦Ż¼├┐éĆĖ▀╦┘ėŗöĄŲ„Č╝┼õéõ┴╦ę╗éĆīŻė├Ą─┐žųŲūų╣ØüĒī”ėŗöĄŲ„▀MąąĖ„ĘN┐žųŲįOų├ĪŻ
1.┐žųŲūų╣Ø╣”─▄šf├„
Ė▀╦┘ėŗöĄŲ„HSC0Ī½HSC3Ą─┐žųŲūų╣ØĖ„╬╗╣”─▄šf├„ęŖ▒Ē6-64ĪŻ└²╚ńŻ¼Ė▀╦┘ėŗöĄŲ„HSC0Ą─┐žųŲūų╣Ø×ķSMB37Ż¼ŲõųąSM37.0╬╗ė├üĒįOų├Å═╬╗ėąą¦ļŖŲĮŻ¼«öįō╬╗×ķ0ĢrĖ▀ļŖŲĮÅ═╬╗ėąą¦Ż¼įō╬╗×ķ1ĢrĄ═ļŖŲĮÅ═╬╗ėąą¦ĪŻ
▒Ē6-64 Ė▀╦┘ėŗöĄŲ„HSC0Ī½HSC3Ą─┐žųŲūų╣ØĖ„╬╗╣”─▄šf├„


2.┐žųŲūų╣ØįOų├┼e└²
ė├┐žųŲūų╣ØįOų├Ė▀╦┘ėŗöĄŲ„╚ńłD6-52╦∙╩ŠĪŻPLCĄ┌ę╗┤╬Æ▀├ĶĢrSM0.1ė|³cĮė═©ę╗éĆÆ▀├Ķų▄Ų┌Ż¼╩ūŽ╚MOV_BųĖ┴Ņł╠ąąŻ¼īó╩«┴∙▀MųŲöĄF8(╝┤11111000)╦═╚ļSMB37å╬į¬Ż¼ätSM37.7Ī½SM37.0×ķ11111000Ż¼▀@śėŠ═īóĖ▀╦┘ėŗöĄŲ„HSC0Ą─Å═╬╗įO×ķĖ▀ļŖŲĮŻ¼š²Į╗ėŗöĄįO×ķ4Ī┴─Ż╩Į;╚╗║¾HDEFųĖ┴Ņł╠ąąŻ¼īóHSC0╣żū„─Ż╩ĮįO×ķ─Ż╩Į10ĪŻ

łD6-52 ė├┐žųŲūų╣ØįOų├Ė▀╦┘ėŗöĄŲ„
┴∙ĪóĖ▀╦┘ėŗöĄŲ„ėŗöĄųĄĄ─ūx╚Ī┼cįOų├
1.ėŗöĄųĄĄ─ūx╚Ī
Ė▀╦┘ėŗöĄŲ„Ą─«öŪ░ėŗöĄųĄ▒Ż┤µį┌HC┤µā”å╬į¬ųąŻ¼Ė▀╦┘ėŗöĄŲ„HSC0Ī½HSC3Ą─«öŪ░ųĄĘųäe▒Ż┤µį┌HC0Ī½HC3å╬į¬ųąŻ¼▀@ą®å╬į¬ųąĄ─öĄō■×ķų╗ūxŅÉą═Ż¼╝┤▓╗─▄Ž“▀@ą®å╬į¬īæ╚ļöĄō■ĪŻ
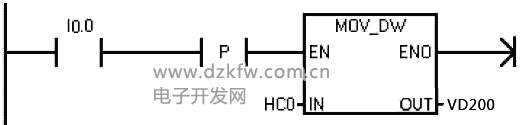
łD6-53 Ė▀╦┘ėŗöĄŲ„ėŗöĄųĄĄ─ūx╚Ī
Ė▀╦┘ėŗöĄŲ„ėŗöĄųĄĄ─ūx╚Ī╚ńłD6-53╦∙╩ŠĪŻ«öI0.0ė|³cė╔öÓķ_▐D×ķķ]║ŽĢrŻ¼╔Ž╔²čžPė|³cĮė═©ę╗éĆÆ▀├Ķų▄Ų┌Ż¼MOV_DWųĖ┴Ņł╠ąąŻ¼īóĖ▀╦┘ėŗöĄŲ„HSC0Ą─«öŪ░ėŗöĄųĄ(▒Ż┤µį┌HC0å╬į¬)ūx╚ļ▓ó▒Ż┤µį┌VD200å╬į¬ĪŻ
2.ėŗöĄųĄĄ─įOų├
├┐éĆĖ▀╦┘ėŗöĄŲ„Č╝ė├ā╔éĆīŻė├┤µā”å╬į¬Ęųäe┤µĘ┼«öŪ░ėŗöĄųĄ(CV)║═ŅAįOėŗöĄųĄ(PV)Ż¼▀@ā╔éĆųĄČ╝╩Ū32╬╗(ļpūų)ĪŻį┌Ė▀╦┘ėŗöĄŲ„╣żū„ĢrŻ¼«öCV=PVĢrĢ■ė|░lHSCųąöÓĪŻ«öŪ░ėŗöĄųĄ┐╔Å─HCå╬į¬ųąūx╚ĪŻ¼ŅAįOųĄät¤oĘ©ų▒Įėūx╚ĪĪŻę¬īóą┬Ą─CVųĄ╗“PVųĄ▌d╚ļĖ▀╦┘ėŗöĄŲ„Ż¼▒žĒÜŽ╚įOų├ŽÓæ¬Ą─┐žųŲūų╣Ø║═īŻė├ļpūų┤µā”å╬į¬Ż¼į┘ł╠ąąHSCųĖ┴Ņęįīóą┬ųĄé„╦═ĄĮĖ▀╦┘ėŗöĄŲ„ĪŻ
HSC0Ī½HSC3Ė▀╦┘ėŗöĄŲ„┤µĘ┼CVųĄ║═PVųĄĄ─īŻė├┤µā”å╬į¬ęŖ▒Ē6-65ĪŻ└²╚ńŻ¼Ė▀╦┘ėŗöĄŲ„HSC0▓╔ė├SMD38ļpūųå╬į¬┤µĘ┼ą┬CVųĄŻ¼▓╔ė├SMD42ļpūųå╬į¬┤µĘ┼ą┬PVųĄĪŻ
▒Ē6-65 HSC0Ī½HSC3Ė▀╦┘ėŗöĄŲ„┤µĘ┼CVųĄ║═PVųĄĄ─īŻė├┤µā”å╬į¬

Ė▀╦┘ėŗöĄŲ„ėŗöĄųĄĄ─įOų├╚ńłD6-54╦∙╩ŠĪŻ«öI0.2ė|³cė╔öÓķ_▐D×ķķ]║ŽĢrŻ¼╔Ž╔²čžPė|³cĮė═©ę╗éĆÆ▀├Ķų▄Ų┌Ż¼╩ūŽ╚Ą┌1éĆMOV_DWųĖ┴Ņł╠ąąŻ¼īóą┬CVųĄ(«öŪ░ėŗöĄųĄ)Ī░100Ī▒╦═╚ļSMD38å╬į¬;╚╗║¾Ą┌2éĆMOV_DWųĖ┴Ņł╠ąąŻ¼īóą┬PVųĄ(ŅAįOėŗöĄųĄ)Ī░200Ī▒╦═╚ļSMD42å╬į¬;Įėų°Ė▀╦┘ėŗöĄŲ„HSC0Ą─┐žųŲūų╣ØųąĄ─SM37.5ĪóSM37.6ā╔╬╗Š∙Ą├ļŖ×ķ1Ż¼į╩įSHSC0Ė³ą┬CVųĄ║═PVųĄ;ūŅ║¾HSCųĖ┴Ņł╠ąąŻ¼īóą┬CVųĄ║═PVųĄ▌d╚ļĖ▀╦┘ėŗöĄŲ„HSC0ĪŻ
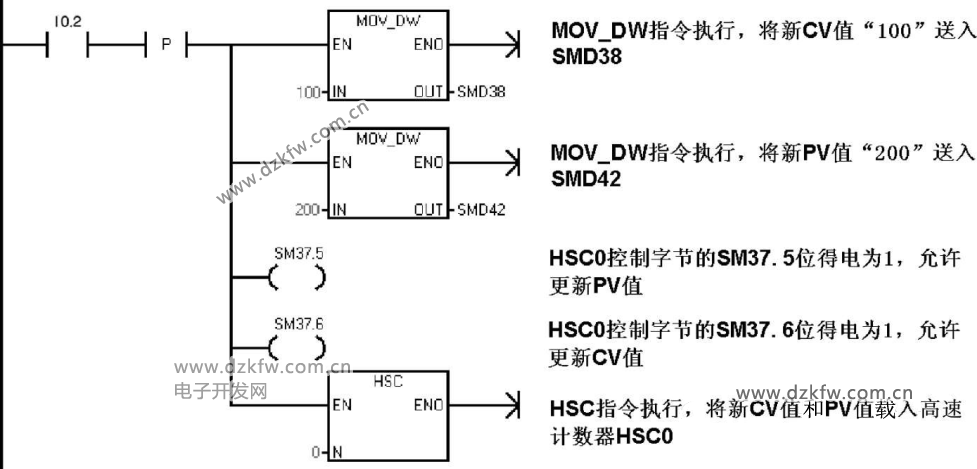
łD6-54 Ė▀╦┘ėŗöĄŲ„ėŗöĄųĄĄ─įOų├
į┌ł╠ąąHSCųĖ┴ŅŪ░Ż¼įOų├┐žųŲūų╣Ø║═ą▐Ė─SMDå╬į¬ųąĄ─ą┬CVųĄĪóPVųĄ▓╗Ģ■ė░ĒæĖ▀╦┘ėŗöĄŲ„Ą─▀\ąą;ų╗ėął╠ąąHSCųĖ┴Ņ║¾Ż¼Ė▀╦┘ėŗöĄŲ„▓┼░┤ą┬įOų├ųĄķ_╩╝╣żū„ĪŻ
Ų▀ĪóĖ▀╦┘ėŗöĄŲ„Ą─ĀŅæBūų╣Ø
├┐éĆĖ▀╦┘ėŗöĄŲ„Č╝ėąę╗éĆ┐žųŲūų╣Ø║═ę╗éĆĀŅæBūų╣ØŻ¼┐žųŲūų╣Øė├üĒįOų├┐žųŲėŗöĄŲ„Ą─╣żū„Ż¼ĀŅæBūų╣Øätė├üĒĘ┤ė│ėŗöĄŲ„Ą─ę╗ą®╣żū„ĀŅæBĪŻHSC0Ī½HSC3Ė▀╦┘ėŗöĄŲ„Ą─ĀŅæBūų╣ØęŖ▒Ē6-66Ż¼Ųõųą├┐éĆĀŅæBūųūų╣ØĄ─0Ī½4╬╗▓╗ė├ĪŻ▒OęĢĖ▀╦┘ėŗöĄŲ„ĀŅæBūų╣ØĄ─ĀŅæB╬╗ųĄŻ¼│²┴╦┐╔ęį┴╦ĮŌėŗöĄŲ„«öŪ░Ą─╣żū„ĀŅæB═ŌŻ¼▀Ć┐╔ęįė├ĀŅæB╬╗ųĄüĒė|░lŲõ╦¹▓┘ū„ĪŻ└²╚ńŻ¼«öSM36.6=1ĢrŻ¼▒Ē╩ŠHSC0Ą─«öŪ░ėŗöĄųĄš²║├Ą╚ė┌ŅAįOųĄŻ¼┐╔ęįė├SM36.6=1ė|░lł╠ąąę╗Č╬│╠ą“ĪŻ
▒Ē6-66 HSC0Ī½HSC3Ė▀╦┘ėŗöĄŲ„Ą─ĀŅæBūų╣Ø

░╦ĪóĖ▀╦┘ėŗöĄŲ„Ą─ŠÄ│╠▓Į¾E┼c┼e└²
1.Ė▀╦┘ėŗöĄŲ„Ą─ŠÄ│╠▓Į¾E
Ė▀╦┘ėŗöĄŲ„Ą─ŠÄ│╠▌^×ķÅ═ļsŻ¼ę╗░Ń▓Į¾E╚ńŽ┬ĪŻĖ∙ō■ėŗöĄę¬Ū¾įOų├Ė▀╦┘ėŗöĄŲ„Ą─┐žųŲūų╣ØĪŻ└²╚ńŻ¼ūīHSC1Ą─┐žųŲūų╣ØSMB47=16#F8Ż¼ätīóHSC1įO×ķį╩įSėŗöĄĪóį╩įSīæ╚ļėŗöĄ│§╩╝ųĄĪóį╩įSīæ╚ļėŗöĄŅAįOųĄĪóĖ³ą┬ėŗöĄĘĮŽ“×ķ╝ėėŗöĄĪóš²Į╗ėŗöĄ×ķ4Ī┴─Ż╩ĮĪóĖ▀ļŖŲĮÅ═╬╗ĪŻł╠ąąHDEFųĖ┴ŅŻ¼īó─│ŠÄ╠¢Ą─Ė▀╦┘ėŗöĄŲ„įO×ķ─│ĘN╣żū„─Ż╩ĮĪŻīóėŗöĄ│§╩╝ųĄīæ╚ļ«öŪ░ųĄ┤µā”Ų„ĪŻ«öŪ░ųĄ┤µā”Ų„╩ŪųĖSMD38ĪóSMD48ĪóSMD58║═SMD138ĪŻīóėŗöĄŅAįOųĄīæ╚ļŅAįOųĄ┤µā”Ų„ĪŻŅAįOųĄ┤µā”Ų„╩ŪųĖSMD42ĪóSMD52ĪóSMD62║═SMD142ĪŻ╚ń╣¹═∙ŅAįOųĄ┤µā”Ų„īæ╚ļ16#00Ż¼ätĖ▀╦┘ėŗöĄŲ„▓╗╣żū„ĪŻ×ķ┴╦▓ČūĮ«öŪ░ųĄ(CV)Ą╚ė┌ŅAįOųĄ(PV)Ż¼┐╔ė├ųąöÓ▀BĮėATCHųĖ┴ŅīóŚl╝■CV=PVųąöÓ╩┬╝■(HSC0Ą─CV=PVī”æ¬ųąöÓ╩┬╝■12)┼c─│ųąöÓ│╠ą“▀BĮėŲüĒĪŻ×ķ┴╦▓ČūĮėŗöĄĘĮŽ“Ė─ūāŻ¼┐╔ė├ųąöÓ▀BĮėATCHųĖ┴ŅīóĘĮŽ“Ė─ūāųąöÓ╩┬╝■(HSC0Ą─ĘĮŽ“Ė─ūāī”æ¬ųąöÓ╩┬╝■27)┼c─│ųąöÓ│╠ą“▀BĮėŲüĒĪŻ×ķ┴╦▓ČūĮėŗöĄŲ„═Ō▓┐Å═╬╗Ż¼┐╔ė├ųąöÓ▀BĮėATCHųĖ┴Ņīó═Ō▓┐Å═╬╗ųąöÓ╩┬╝■(HSC0Ą─═Ō▓┐Å═╬╗ī”æ¬ųąöÓ╩┬╝■28)┼c─│ųąöÓ│╠ą“▀BĮėŲüĒĪŻł╠ąąųąöÓį╩įSENIųĖ┴ŅŻ¼į╩įSŽĄĮyĮė╩▄Ė▀╦┘ėŗöĄŲ„(HSC)«a╔·Ą─ųąöÓšłŪ¾ĪŻł╠ąąHSCųĖ┴ŅŻ¼åóäė─│Ė▀╦┘ėŗöĄŲ„░┤Ū░├µĄ─įOų├╣żū„ĪŻŠÄīæŽÓĻPĄ─ųąöÓ│╠ą“ĪŻ
2.Ė▀╦┘ėŗöĄŲ„Ą─ŠÄ│╠┼e└²
Ė▀╦┘ėŗöĄŲ„Ą─ŠÄ│╠┼e└²ęŖ▒Ē6-67Ż¼š¹éĆ│╠ą“ė╔MAIN(ų„│╠ą“)ĪóSBR_0(ūė│╠ą“0)║═INT_0(ųąöÓ│╠ą“0)ĮM│╔ĪŻ
PLC▀M╚ļRUN─Ż╩ĮĄ┌ę╗┤╬Æ▀├ĶĢrŻ¼ų„│╠ą“ųąĄ─SM0.1ė|³cĮė═©ę╗éĆÆ▀├Ķų▄Ų┌Ż¼ł╠ąąš{ė├ūė│╠ą“SBR_0ųĖ┴ŅŻ¼│╠ą“▐D╚ļł╠ąąSBR_0ūė│╠ą“ĪŻį┌ūė│╠ą“SBR_0ųąŻ¼ī”Ė▀╦┘ėŗöĄŲ„HSC0▀Mąą│§╩╝╗»įOų├Ż¼įOų├ā╚╚▌ėąŻ║ė├MOV_BųĖ┴ŅįOų├HSC0Ą─┐žųŲūų╣ØSMB37;ė├HDEFųĖ┴ŅūīHSC0╣żū„į┌─Ż╩Į10;ė├MOV_DWųĖ┴ŅīóHSC0«öŪ░ųĄ(CV)┤µā”Ų„SMD38ŪÕ0;ė├MOV_DWųĖ┴Ņ═∙HSC0Ą─ėŗöĄŅAįOųĄ(PV)┤µā”Ų„SMD42ųąīæ╚ļPVųĄ;ė├ATCHųĖ┴ŅīóųąöÓ╩┬╝■12(HSC0Ą─CV=PVĢrė|░lĄ─╩┬╝■)┼cųąöÓ│╠ą“INT_0ĻP┬ōŲüĒ;ė├ENIųĖ┴Ņ┤“ķ_╦∙ėąĄ─ųąöÓ;ė├HSCųĖ┴Ņ╩╣įOų├╔·ą¦▓óåóäėHSC0╣żū„ĪŻ
▒Ē6-67 Ė▀╦┘ėŗöĄŲ„Ą─ŠÄ│╠┼e└²
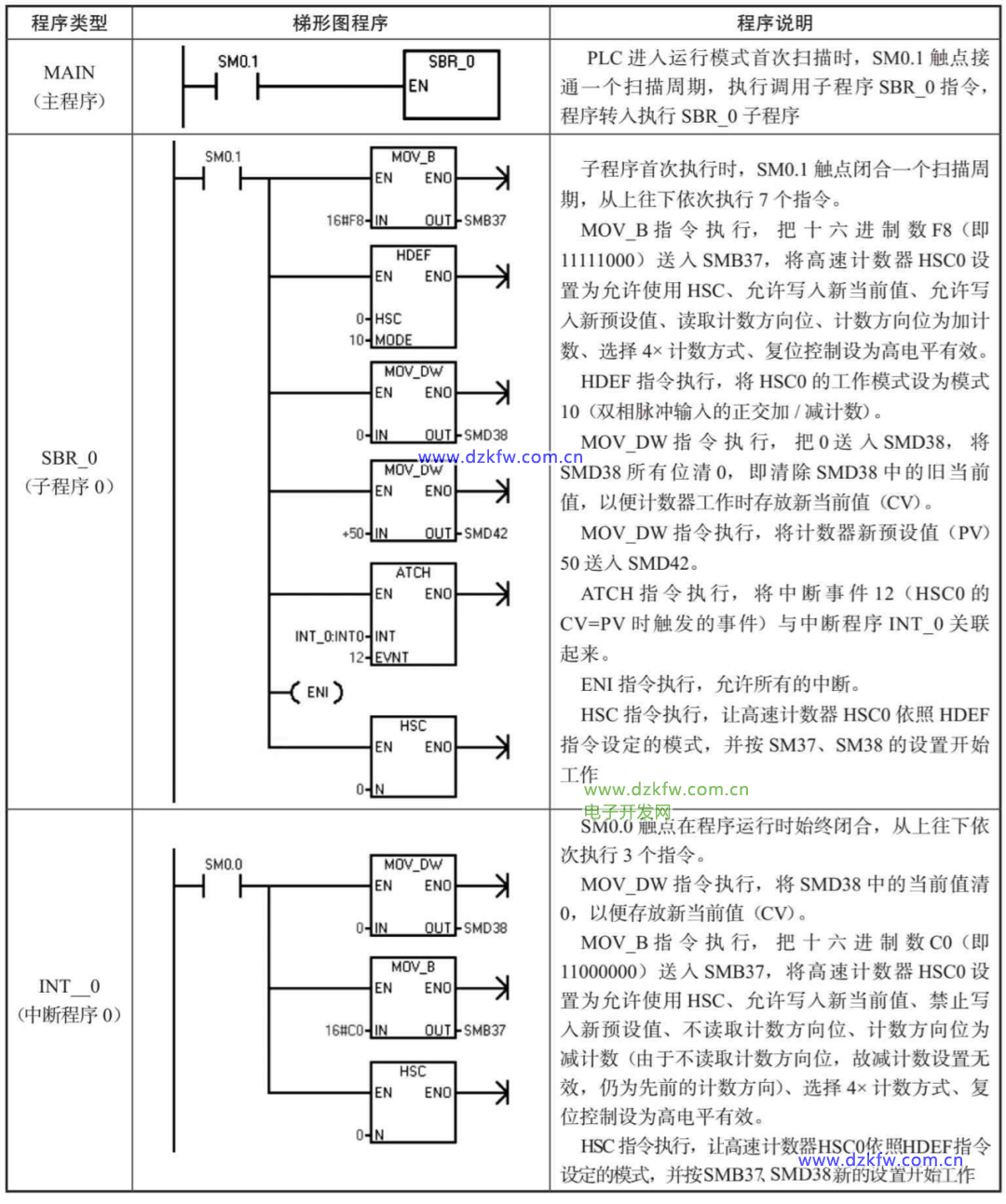
Ė▀╦┘ėŗöĄŲ„HSC0åóäė║¾ķ_╩╝ėŗöĄŻ¼«öHSC0Ą─«öŪ░ėŗöĄųĄ(CV)Ą╚ė┌ėŗöĄŅAįOųĄ(PV)ĢrŻ¼ė|░lųąöÓ╩┬╝■12Ż¼ė╔ė┌ęčīóųąöÓ╩┬╝■12┼cųąöÓ│╠ą“INT_0ĻP┬ōŲüĒŻ¼╣╩±R╔Žł╠ąąųąöÓ│╠ą“INT_0ĪŻį┌INT_0│╠ą“ųąŻ¼Ž╚ė├MOV_DWųĖ┴ŅīóHSC0«öŪ░ųĄ(CV)┤µā”Ų„SMD38ŪÕ0Ż¼į┘ė├MOV_BųĖ┴Ņųžą┬įOų├HSC0Ą─┐žųŲūų╣ØSMB37Ż¼╚╗║¾ė├HSCųĖ┴Ņ╩╣ą┬įOų├╔·ą¦▓óåóäėHSC0ųžą┬╣żū„ĪŻ
Ė▀╦┘ėŗöĄŲ„HSC0├┐ėŗöĄĄĮCV=PVĢrČ╝Ģ■«a╔·ųąöÓŻ¼ł╠ąąę╗┤╬ųąöÓ│╠ą“INT_0;ł╠ąąųąöÓ│╠ą“║¾Ż¼HSC0ėų░┤ą┬Ą─įOų├ųžą┬ķ_╩╝ėŗöĄŻ¼ęį║¾▓╗öÓųžÅ═▀@éĆ▀^│╠ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū