
ėąĻPpid┐žųŲĄ─ąĪų¬ūRŻ¼į┌plcŠÄ│╠ųąįOėŗę╗éĆ┐žųŲ─Żą═Ż¼┐žųŲę╗éĆ╚╦ęįpid┐žųŲĄ─ĘĮ╩Įū▀110▓ĮŻ¼╚╗║¾═ŻŽ┬üĒŻ¼ų„ę¬ėą╚²ĘN┐žųŲĘĮĘ©Ż¼ūī╬ęéāę╗ŲüĒīW┴ĢŽ┬ĪŻ
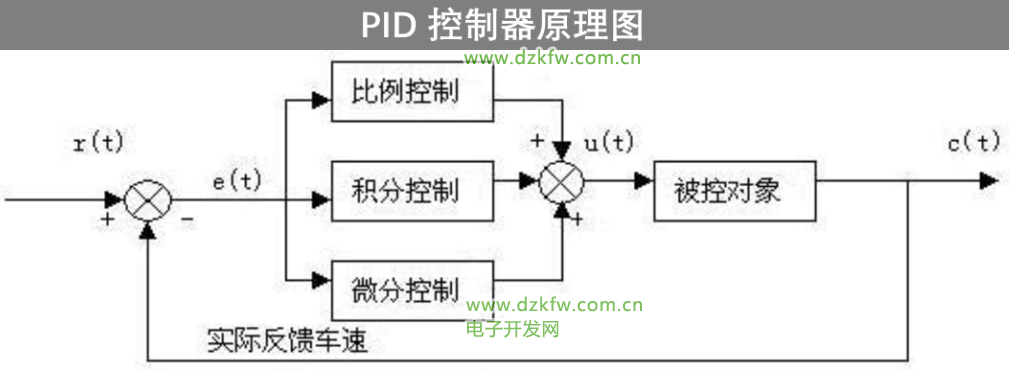
pid┐žųŲĄ─ĘĮ╩Į
╣▓ėą╚²ĘNĘĮ╩ĮŻ¼ę╗╩Ūp▒╚└²┐žųŲŻ¼Č■╩ŪpiĘeĘų┐žųŲŻ¼╚²╩Ūpd╬óĘų┐žųŲĪŻ
1Īóp▒╚└²┐žųŲ
ūī╦¹ū▀110▓ĮŻ¼╦¹░┤ššę╗Č©Ą─▓ĮĘźū▀ĄĮę╗░┘┴ŃÄū▓ĮŻ©╚ń108▓ĮŻ®╗“100ČÓ▓ĮŻ©╚ń112▓ĮŻ®Š══Ż┴╦ĪŻ
šf├„Ż║p▒╚└²┐žųŲ╩Ūę╗ĘNūŅ║åå╬Ą─┐žųŲĘĮ╩ĮĪŻŲõ┐žųŲŲ„Ą─▌ö│÷┼c▌ö╚ļš`▓Ņą┼╠¢│╔▒╚└²ĻPŽĄĪŻ«öāHėą▒╚└²┐žųŲĢrŽĄĮy▌ö│÷┤µį┌ĘĆæBš`▓ŅŻ©steady-state errorŻ®ĪŻ
2ĪópiĘeĘų┐žųŲ
╦¹░┤ššę╗Č©Ą─▓ĮĘźū▀ĄĮ112▓Į╚╗║¾╗žŅ^Įėų°ū▀Ż¼ū▀ĄĮ108▓Į╬╗ų├ĢrŻ¼╚╗║¾ėų╗žŅ^Ž“110▓Į╬╗ų├ū▀ĪŻį┌110▓Į╬╗ų├╠ÄüĒ╗ž╗╬Äū┤╬Ż¼ūŅ║¾═Żį┌110▓ĮĄ─╬╗ų├ĪŻ
šf├„Ż║į┌ĘeĘųi┐žųŲųąŻ¼┐žųŲŲ„Ą─▌ö│÷┼c▌ö╚ļš`▓Ņą┼╠¢Ą─ĘeĘų│╔š²▒╚ĻPŽĄĪŻī”ę╗éĆūįäė┐žųŲŽĄĮyŻ¼╚ń╣¹į┌▀M╚ļĘĆæB║¾┤µį┌ĘĆæBš`▓ŅŻ¼ätĘQ▀@éĆ┐žųŲŽĄĮy╩ŪėąĘĆæBš`▓ŅĄ─╗“║åĘQėą▓ŅŽĄĮyŻ©system with steady-state errorŻ®ĪŻ
×ķ┴╦Ž¹│²ĘĆæBš`▓ŅŻ¼į┌┐žųŲŲ„ųą▒žĒÜę²╚ļĪ░ĘeĘųĒŚĪ▒ĪŻĘeĘųĒŚī”š`▓Ņ╚ĪøQė┌ĢrķgĄ─ĘeĘųŻ¼ļSų°ĢrķgĄ─į÷╝ėŻ¼ĘeĘųĒŚĢ■į÷┤¾ĪŻ▀@śėŻ¼╝┤▒Ńš`▓Ņ║▄ąĪŻ¼ĘeĘųĒŚę▓Ģ■ļSų°ĢrķgĄ─į÷╝ėČ°╝ė┤¾Ż¼╦³═Ųäė┐žųŲŲ„Ą─▌ö│÷į÷┤¾╩╣ĘĆæBš`▓Ņ▀Mę╗▓Į£pąĪŻ¼ų▒ĄĮĄ╚ė┌┴ŃĪŻ
ę“┤╦Ż¼▒╚└²+ĘeĘųŻ©piŻ®┐žųŲŲ„Ż¼┐╔ęį╩╣ŽĄĮyį┌▀M╚ļĘĆæB║¾¤oĘĆæBš`▓ŅĪŻ
3Īópd╬óĘų┐žųŲ
╦¹░┤ššę╗Č©Ą─▓ĮĘźū▀ĄĮę╗░┘┴ŃÄū▓Į║¾Ż¼į┘┬²┬²ĄžŽ“110▓ĮĄ─╬╗ų├┐┐Į³Ż¼╚ń╣¹ūŅ║¾─▄Š½┤_═Żį┌110▓ĮĄ─╬╗ų├Ż¼Š═╩Ū¤oņo▓Ņ┐žųŲŻ╗╚ń╣¹═Żį┌110▓ĮĖĮĮ³Ż©╚ń109▓Į╗“111▓Į╬╗ų├Ż®Ż¼Š═╩Ūėąņo▓Ņ┐žųŲĪŻ
šf├„Ż║į┌╬óĘų┐žųŲdųąŻ¼┐žųŲŲ„Ą─▌ö│÷┼c▌ö╚ļš`▓Ņą┼╠¢Ą─╬óĘųŻ©╝┤š`▓ŅĄ─ūā╗»┬╩Ż®│╔š²▒╚ĻPŽĄĪŻūįäė┐žųŲŽĄĮyį┌┐╦Ę■š`▓ŅĄ─š{╣Ø▀^│╠ųą┐╔─▄Ģ■│÷¼Fš±╩Ä╔§ų┴╩¦ĘĆŻ¼ŲõįŁę“╩Ūė╔ė┌┤µį┌ėą▌^┤¾æTąįĮM╝■Ż©Łh╣ØŻ®╗“ėą£■║¾Ż©delayŻ®ĮM╝■Ż¼Š▀ėąęųųŲš`▓ŅĄ─ū„ė├Ż¼Ųõūā╗»┐é╩Ū┬õ║¾ė┌š`▓ŅĄ─ūā╗»ĪŻ
ĮŌøQ▐kĘ©Ż║
╩╣ęųųŲš`▓Ņū„ė├Ą─ūā╗»Ī░│¼Ū░Ī▒Ż¼╝┤į┌š`▓ŅĮėĮ³┴ŃĢrŻ¼ęųųŲš`▓ŅĄ─ū„ė├Š═æ¬įō╩Ū┴ŃĪŻ▀@Š═╩ŪšfŻ¼į┌┐žųŲŲ„ųąāHę²╚ļĪ░▒╚└²pĪ▒ĒŚ═∙═∙╩Ū▓╗ē“Ą─Ż¼▒╚└²ĒŚĄ─ū„ė├āH╩ŪĘ┼┤¾š`▓ŅĄ─Ę∙ųĄŻ¼Č°─┐Ū░ąĶę¬į÷╝ėĄ─╩ŪĪ░╬óĘųĒŚĪ▒Ż¼╦³─▄ŅA£yš`▓Ņūā╗»Ą─┌ģä▌ĪŻ
▀@śėŻ¼Š▀ėą▒╚└²+╬óĘųĄ─┐žųŲŲ„Ż¼Š═─▄ē“╠ßŪ░╩╣ęųųŲš`▓ŅĄ─┐žųŲū„ė├Ą╚ė┌┴ŃŻ¼╔§ų┴×ķžōųĄŻ¼Å─Č°▒▄├Ō┴╦▒╗┐ž┴┐Ą─ć└ųž│¼š{ĪŻ
ę“┤╦Ż¼ī”ėą▌^┤¾æTąį╗“£■║¾Ą─▒╗┐žī”Ž¾Ż¼▒╚└²p+╬óĘųdŻ©pdŻ®┐žųŲŲ„─▄Ė─╔ŲŽĄĮyį┌š{╣Ø▀^│╠ųąĄ─äėæB╠žąįĪŻ
ęį╔ŽŠ═╩Ūpid┐žųŲĄ─ąĪų¬ūRŻ¼ŽŻ═¹ī”┤¾╝ęėą╦∙Ä═ų·ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū