
ģŽÂēĻũļÐÆũ
ģŽÂēĻĘĮŌŧ·NģŽģöČËî ÓXOÏÞĩÄÂēĻžīÆäÕņÓîlÂĘļßÓÚ20 kHzĩÄCÐĩēĻĄĢģŽÂēĻũļÐÆũÔÚđĪŨũĩÄršōūÍĘĮĒëššÍģŽÂēĻÖŪégĩÄŧĨÏāÞDQĢŽŪģŽÂēĻũļÐÆũ°lÉäģŽÂēĻrĢŽ°lÉäģŽÂēĻĩÄĖ―î^ĒëšÞDŧŊĩÄģŽÂēĻ°lÉäģöČĨĢŽŪ―ÓĘÕģŽÂēĻrĢŽģŽÂēĻ―ÓĘÕĖ―î^ĒģŽÂēĻÞDŧŊĩÄëšŧØËÍĩ―ÎÆŽCŋØÖÆÐūÆŽĄĢģŽÂēĻūßÓÐÕņÓîlÂĘļߥĒēĻéLķĖĄĒĀ@ÉäŽFÏóÐĄķøĮŌ·―ÏōÐÔšÃßÄÜōé·īÉäūķĻÏōũēĨĩČücĢŽķøĮŌģŽÂēĻũļÐÆũĩÄÄÜÁŋÏûšÄūÂýÓÐĀûÓÚyūāĄĢÔÚÖÐĄĒéLūāëxyÁŋrĢŽģŽÂēĻũļÐÆũĩÄūŦķȚͷ―ÏōÐÔ.ķžŌŠīóīóÓÚžtÍâūũļÐÆũĢŽĩŦrļņŌēÉÔŲFĄĢ
ģŽÂēĻ°lÉäÆũÏōÄģŌŧ·―Ïō°lÉäģŽÂēĻĢŽÔÚ°lÉäĩÄÍŽré_ĘžÓrĢŽģŽÂēĻÔÚŋÕâÖÐũēĨĢŽÍūÖÐÅöĩ―ÕÏĩKÎïūÍÁĒžī·ĩŧØíĢŽģŽÂēĻ―ÓĘÕÆũĘÕĩ―·īÉäēĻūÍÁĒžīÍĢÖđÓrĄĢÂēĻÔÚŋÕâÖÐĩÄũēĨËŲķČé340m/sĢŽļųþÓrÆũÓäĩÄrégtĢŽūÍŋÉŌÔÓËãģö°lÉäücūāÕÏĩKÎïĩÄūāëxsĢŽžīĢšs=340m/sĄÁ t / 2 ĄĢß@ūÍĘĮËųÖ^ĩÄrégēîyūā·ĻĄĢąūōĀûÓÃģŽÂēĻyĩÃĩÄūāëxÄīŪŋÚÖÐï@ĘūĄĢ

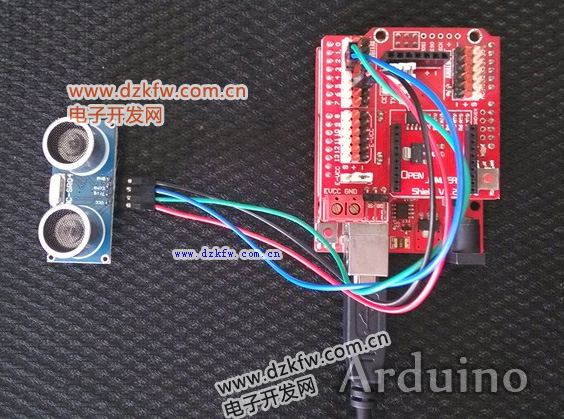
HC-SR04ģŽÂēĻyūāÄĢKĩÄĩþ―ÓŋÚČįÉÏDĢŽÅcArduino unoĩÄ―ÓŋÚßB―Ó·―·ĻĢšVCC―Ó+5VĢŽGND―ÓĩØĢŽTrig―ÓĩŨÖI/O―ÓŋÚ5ĢĻŌēŋÉŌÔĘĮÆäËüĢĐĢŽEcho―ÓĩŨÖI/O―ÓŋÚ4ĢĻŌēŋÉŌÔĘĮÆäËüĢĐĄĢ
ÖŠŨRŌŠücĢš
/*
ČÕÆÚ:2014.10.24
đĶÄÜĢšĀûÓÃSR04ģŽÂēĻũļÐÆũßMÐÐyūāĢŽēĒÓÃīŪŋÚï@ĘūyģöĩÄūāëxÖĩ
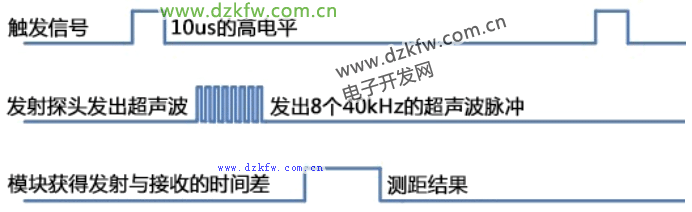
·―Ę―Ģš1ĄĒĘđÓÃArduinoēÉÓÃĩŨÖŌýÄ_―oSR04ĩÄTrigŌýÄ_ÖÁÉŲ10ĶĖsĩÄļßëÆ―ÐÅĖĢŽÓ|°lSR04ÄĢKyūāđĶÄÜĢŧ
2ĄĒÓ|°lšóĢŽÄĢKþŨÔÓ°lËÍ840KHzĩÄģŽÂēĻÃ}_ĢŽēĒŨÔÓzyĘĮ·ņÓÐÐÅĖ·ĩŧØĄĢ
ß@ē―þÓÉÄĢKČēŋŨÔÓÍęģÉĄĢ
3ĄĒČįÓÐÐÅĖ·ĩŧØĢŽEchoŌýÄ_þÝģöļßëÆ―ĢŽļßëÆ―ģÖĀmĩÄrégūÍĘĮģŽÂēĻÄ°lÉäĩ―·ĩŧØĩÄrégĄĢ
īËrĢŽÎŌÄÜĘđÓÃpulseIn()šŊĩŦ@ČĄĩ―yūāĩÄ―YđûĢŽēĒÓËãģöūāąŧyÎïĩÄëHūāëxĄĢ
*/
// ÔOķĻSR04ßB―ÓĩÄArduinoŌýÄ_
const int TrigPin = 2;
const int EchoPin = 3;
const int LedPin = 17;
float distance;
void setup() // ģõĘžŧŊīŪŋÚÍĻÐÅž°ßB―ÓSR04ĩÄŌýÄ_
{
Serial.begin(9600);
pinMode(TrigPin, OUTPUT);
pinMode(TrigPin, OUTPUT);
pinMode(EchoPin, INPUT); // ŌŠzyŌýÄ_ÉÏÝČëĩÄÃ}_ķČĢŽÐčŌŠÏČÔOÖÃéÝČë îB
Serial.println("Ultrasonic sensor:");
}
void loop()
{
// ŪaÉúŌŧ10usĩÄļßÃ}_ČĨÓ|°lTrigPin
digitalWrite(LedPin,HIGH);
delayMicroseconds(2);
digitalWrite(TrigPin,HIGH);
delayMicroseconds(10);
digitalWrite(TrigPin,LOW);
// zyÃ}_ķČĢŽēĒÓËãģöūāëx
distance = pulseIn(EchoPin,HIGH);
Serial.print(distance);
Serial.print("ms");
distance = distance/58;
distance = (int(distance*100.0))/100.0; //ąĢÁôÉÎŧÐĄĩ
Serial.print(".....distance is:");
Serial.print(distance);
Serial.print("cm");
Serial.println();
delay(1000);
}
 ·ĩŧØíēŋ
·ĩŧØíēŋ ËĒÐÂíÃæ
ËĒÐÂíÃæ ÏÂĩ―íĩŨ
ÏÂĩ―íĩŨ