
ę╗ĪóINPUT║═OUTPUT
1.«öę²─_įOų├×ķINPUTĀŅæBĢrŻ¼ę²─_×ķĖ▀ūĶ┐╣ĀŅæBŻ©100šūÜWŻ®ĪŻ┤╦Ģrę²─_┐╔ęįė├ė┌ūx╚Īé„ĖąŲ„ą┼╠¢╗“ķ_ĻPą┼╠¢ĪŻ
2.«öę²─_įOų├×ķOUTPUTĀŅæBĢrŻ¼ę²─_×ķĄ═ūĶ┐╣ĀŅæBĪŻ▀@ęŌ╬Čų°Arduino┐╔ęįŽ“Ųõ╦³ļŖ┬Ęį¬Ų„╝■╠ß╣®ļŖ┴„ĪŻę▓Š═╩ŪšfŻ¼Arduinoę²─_į┌▌ö│÷Ż©OUTPUTŻ®─Ż╩ĮŽ┬┐╔ęįļŖ┴┴LED╗“š▀“īäėļŖÖCĪŻ
3.INPUT_PULLUP─Ż╩ĮŻ║Arduino╬ó┐žųŲŲ„ūįĦā╚▓┐╔Ž└ŁļŖūĶĪŻį┌įō─Ż╩ĮŽ┬┐╔ęį╩╣ė├įōā╚▓┐╔Ž└ŁļŖūĶĪŻ
Č■Īóę²─_Ą─ū„ė├
1.öĄūųę²─_Ż║
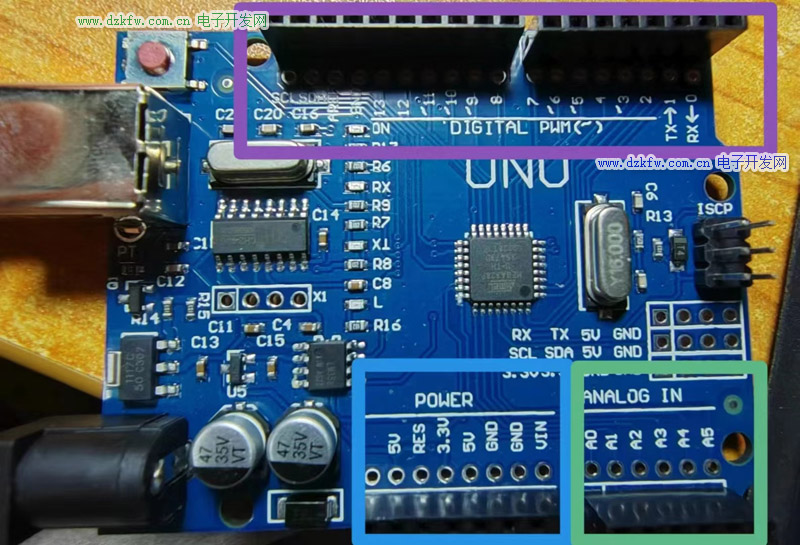
Ī±ę²─_1ŻŁ13ė├ū„öĄūų▌ö╚ļ/▌ö│÷ę²─_ĪŻŲõųąŻ¼ę²─_13▀BĮėĄĮ░Õ▌dĄ─LEDųĖ╩Š¤¶Ż╗ę²─_ 3Īó5Īó6Īó9Īó10Īó11Š▀ėąPWM╣”─▄ĪŻ
Ī±öĄūųę²─_┐╔ęįķ_åó╗“š▀ĻPķ]ĪŻ┤“ķ_ĢrŻ¼╠Äė┌5VĄ─Ė▀ļŖŲĮĀŅæBŻ╗ĻPķ]ĢrŻ¼╠Äė┌0VĄ─Ą═ļŖŲĮĀŅæBĪŻ
Ī±«ööĄūųę²─_┼õų├×ķ▌ö│÷ĢrŻ¼╦³éāįOų├×ķ0╗“5VĪŻ«ö┼õų├×ķ▌ö╚ļĢrŻ¼ļŖē║┐╔ęįį┌0ŻŁ5Vų«ķgūā╗»Ż¼ ▓ó▐DōQ×ķöĄūų▒Ē╩ŠŻ©0╗“1Ż®ĪŻ
Ī±├}īÆš{ųŲŻ©PWMŻ®╩Ūę╗ĘNš{ųŲ╝╝ągŻ¼ė├ė┌ī󎹎óŠÄ┤a×ķ├}ø_ą┼╠¢ĪŻpwmė╔ā╔éĆĻPµI▓┐ĘųĮM│╔Ż║Ņl┬╩║═š╝┐š▒╚ĪŻŅl┬╩øQČ©═Ļ│╔å╬éĆų▄Ų┌╦∙ąĶꬥ─Ģrķgęį╝░ą┼╠¢Å─Ė▀ĄĮĄ═Ą─▓©äė╦┘Č╚ĪŻš╝┐š▒╚øQČ©ą┼╠¢į┌┐éĢrķgČ╬ā╚▒Ż│ųĖ▀ļŖŲĮĄ─ĢrķgĪŻ
2.ļŖį┤Ż║
Ī±VINę²─_Ż║╩╣ė├═Ō▓┐ļŖį┤×ķUNOķ_░l░Õ╣®ļŖ
Ī±5V║═3.3VŻ║Ž“═Ō▓┐ĮM╝■╠ß╣®ĘĆē║Ą─5V║═3.3V
Ī±RESETę²─_Ż║Å═╬╗Arduinoķ_░l░Õ
3.─ŻöM▌ö╚ļŻ║
Ī±A0ŻŁA5ū„×ķADCŻ©─ŻöĄ▐DōQŲ„Ż®ĪŻ▀@ą®ę²─_ė├ū„─ŻöM▌ö╚ļŻ¼Ą½ę▓┐╔ęįė├ū„öĄūų▌ö╚ļ╗“š▀▌ö│÷ĪŻ
Ī±─ŻöĄ▐DōQŻ║ADC╩Ūė├ė┌īó─ŻöMą┼╠¢▐DōQ×ķöĄūųą┼╠¢Ą─ļŖūėļŖ┬ĘĪŻę²─_A0ŻŁA5─▄ē“ūx╚Ī─ŻöMļŖē║ĪŻADC┐╔ęį═©▀^1024éĆöĄūųļŖŲĮ▒Ē╩Š─ŻöMļŖē║Ż¼īóļŖē║▐DōQ×ķ╬ó╠Ä└ĒŲ„┐╔ęį└ĒĮŌĄ─╬╗ĪŻe.g IPšZ궯©īó┬Ģ▓©▐DōQ×ķ─ŻöMļŖē║Ż¼═©▀^įOéõĄ─ADCŻ¼▐DōQ│╔öĄūųöĄō■Ż¼═©▀^╗ź┬ōŠWé„▌öĄĮĮė╩šČ╦ĪŻ
╚²ĪóPWMŻ©ĘĮ▓©┐žųŲą┼╠¢Ż®
1.╣żū„įŁ└ĒŻ║▓╔ė├▓╗═¼Ą─š╝┐š▒╚üĒ─ŻöMĪ░─ŻöM▌ö│÷Ī▒ĪŻ
2.ū„ė├Ż║
Ī±╠ß╣®─ŻöM▌ö│÷Ż╗╚ń╣¹öĄūų▌ö│÷▒╗▀^×VŻ¼ätŲõ─ŻöMļŖē║īóĮķė┌0%ŻŁ100%ų«ķg
Ī±╔·│╔ę¶Ņlą┼╠¢
Ī±┐žųŲ¤¶╣Ō┴┴Č╚Ż¼×ķļŖÖC╠ß╣®ūā╦┘┐žųŲ
Ī±╔·│╔š{ųŲą┼╠¢Ż¼└²╚ń“īäėė├ė┌▀h│╠┐žųŲĄ─╝t═ŌLED
3.╩╣ė├Ż║
Ī±analogWrite(pin,dutyCycle)
pinųĄ▀xō±Ż©3Ż¼5Ż¼6Ż¼9Ż¼10Ż¼11Ż®Ż¼dutyCycleĄ─ųĄį┌0~255ų«ķgĪŻ▀@ĘNĘĮ╩Įpwmą┼╠¢Ą─Ņl┬╩╩Ū╣╠Č©Ą──¼šJųĄŻ©490HzŻ®ĪŻ
# define analogPin 3
void setup()
{
pinMode(analogPin,OUTPUT);
}
void loop()
{
analogWrite(analogPin,100); // ▌ö│÷PWMŻ¼š╝┐š▒╚×ķ 100/255
}
Ī±delayMicroseconds()╩ųäėīŹ¼FŅl┬╩┐╔š{Ą─PWM
Ż©1Ż®ā╔┤╬Ą─digitalWrite▌ö│÷ĀŅæB▒žĒÜŽÓĘ┤Ż╗
Ż©2Ż®┐╔ęįė├delayŻ©Ż®īŹ¼F║┴├ļ╝ēčė▀tŻ¼ė├delayMicrosecondsŻ©Ż®īŹ¼F╬ó├Ņ╝ēčė▀t
Ż©3Ż®╠ž³c
1.pwmĄ─▒╚└²┐╔ęįĖ³Š½┤_
2.ų▄Ų┌║═Ņl┬╩┐╔┐žųŲ
3.╦∙ėąpin─_Č╝┐╔ęį▌ö│÷Ż¼▓╗āHŠųŽ▐ė┌6éĆ─_
4.╚▒³cŻ║CPU¤oĘ©▀MąąŲõ╦¹╗Ņäė
void setup()
{
pinMode(8, OUTPUT); // įOų├8╠¢ę²─_×ķ▌ö│÷─Ż╩Į
}
void loop()
{
digitalWrite(8, HIGH);
delayMicroseconds(100); // ▌ö│÷PWMŻ¼š╝┐š▒╚×ķ100/1000=10%
digitalWrite(8, LOW);
delayMicroseconds(1000 - 100); // ą▐Ė─▀@└’Ą─1000┐╔ęįš{š¹Ņl┬╩Ż¼┐éų▄Ų┌×ķ1000us,╦∙ęįŅl┬╩×ķ1000Hz.
}
╦─Īó╚²Č╬┤·┤aĄ─ģ^äe
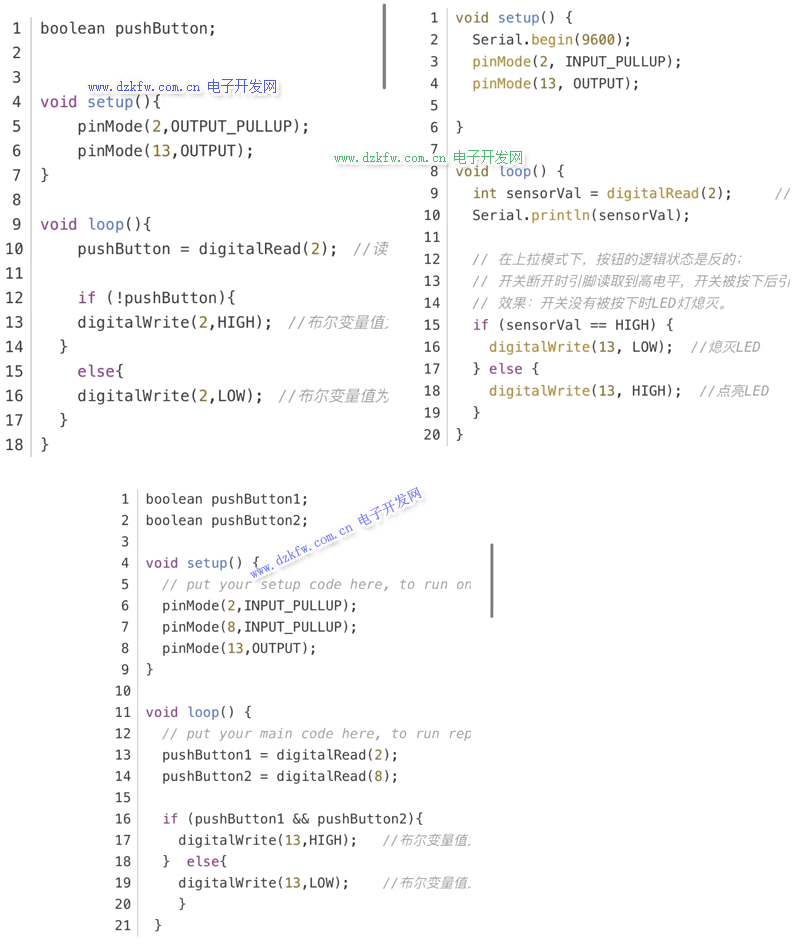
Ī±Ą┌ę╗Č╬┤·┤aČ©┴x┴╦ę╗éĆ▓╝Ā¢ą═ūā┴┐pushButtonŻ¼īó2╠¢ę²─_Ą─ļŖŲĮĀŅæB┘xĮopushButtonŻ¼▓óų▒ĮėĖ∙ō■pushButtonĄ─šµ╝┘┘xėĶ1/0▀M╚ļŚl╝■┼ąČ©Ż¼═¼Ģrį┌┼ąČ©Ģr╝ė╚ļ┴╦▀ē▌ŗ▀\╦ŃĘ¹ŻĪŻ¼╩╣Ą├┼ąČ©Ą─ųĄŽÓĘ┤ĪŻ╦∙ęįįō┤·┤aĄ─▀\╦ŃĮY╣¹×ķ░┤Ž┬░┤ŌoĢrLED¤¶┴┴Ż¼╦╔ķ_░┤ŌoĢrLED¤¶▓╗┴┴ĪŻ
Ī±Ą┌Č■Č╬┤·┤aČ©┴x┴╦ę╗éĆš¹ą╬ūā┴┐sensorValŻ¼īó2╠¢ę²─_Ą─ļŖŲĮĀŅæB┘xĮosensorValŻ¼į┌Śl╝■┼ąČ©ĢrŻ¼░┤ŌoĄ─▀ē▌ŗĀŅæB╩ŪĘ┤Ą─Ż¼«ö░┤Ōoø]ėą░┤Ž┬ĢrŻ¼2╠¢ę²─_×ķĖ▀ļŖŲĮĀŅæBŻ¼į┌ifšZŠõųąę¬╩╣13╠¢ę²─_×ķĄ═ļŖŲĮĀŅæBŻ¼LED¤¶▓╗┴┴Ż¼«ö░┤Ōo░┤Ž┬ĢrätŽÓĘ┤ĪŻ═¼ĢrįōČ╬┤·┤aĄ─Ą┌2ąą║═Ą┌10ąą▀Ćåóäė┴╦┤«┐┌═©ėŹŻ¼▓ó░č╦┘┬╩š{ĄĮ9600Ż¼ätė├æ¶┐╔ęįį┌┤«┐┌ųą┐┤ĄĮsensorValĄ─ųĄĪŻ
Ī±Ą┌╚²Č╬┤·┤a▀\ė├┴╦ā╔éĆ░┤Ōo▓┘ū„Ż¼ę“┤╦Č©┴x┴╦ā╔éĆbooleanūā┴┐ĪŻĄ½į┌ifšZŠõĄ─┼ąČ©ųąø]ėą╩╣ė├ŻĪ▀\╦ŃŻ¼╝┤▀\ąąĮY╣¹×ķ«öā╔éĆ░┤ŌoČ╝ø]ėą░┤Ž┬ĢrŻ¼13╠¢ę²─_Ą─ĀŅæB×ķĖ▀ļŖŲĮŻ¼LED¤¶┴┴Ż╗«ö░┤Ž┬┴╦Ųõųąę╗éĆ░┤Ōo╗“š▀ā╔éĆ░┤ŌoĢrŻ¼13╠¢ę²─_×ķĄ═ļŖŲĮĀŅæBŻ¼LED¤¶▓╗┴┴ĪŻ
╬ÕĪó▀ē▌ŗ▀\╦ŃĘ¹
Ī±&&▀ē▌ŗ┼cŻ║ų╗ėąį┌ā╔éĆ▓┘ū„öĄČ╝×ķšµĢr▓┼ĘĄ╗žšµĪŻ
Ī±&Ż║╚ĪĄžųĘĄ─å╬─┐▀\╦ŃĘ¹Ż╗╬╗▀\╦ŃĘ¹Ż¼▒Ē╩ŠĪ░░┤╬╗┼cĪ▒Ż¼╩Ūļp─┐▀\╦ŃĘ¹ĪŻ
Ī±||▀ē▌ŗ╗“Ż║╚╬ęŌę╗éĆ×ķšµĢrĘĄ╗žšµĪŻ
Ī±ŻĪ▀ē▌ŗĘŪŻ║«ö▓┘ū„öĄ×ķ╝┘ĢrĘĄ╗žšµĪŻ
┴∙Īó┤«┐┌═©ėŹ
void setup(){
Serial.begin(9600);
}
void loop(){
if (Serial.available()){
int value=Serial.read();
}
1.Serial begin(9600)
įOų├┤«┐┌═©ą┼▓©╠ž▒╚┬╩×ķ9600
2.if(Serial.avilable())
┼ąöÓArduino┤«┐┌╩Ūʱ╩šĄĮöĄō■Ż¼║»öĄSerial.availableŻ©Ż®ĘĄ╗žųĄ×ķintą═Ż¼▓╗ĦģóöĄ
3.int var=Serial.read()
īó┤«┐┌öĄō■ūx╚ļĄĮūā┴┐varųąŻ¼║»öĄSerial.read()ę▓▓╗ĦģóöĄŻ¼ĘĄ╗žųĄ×ķ┤«┐┌öĄō■Ż¼intą═
Ų▀Īóé„ĖąŲ„
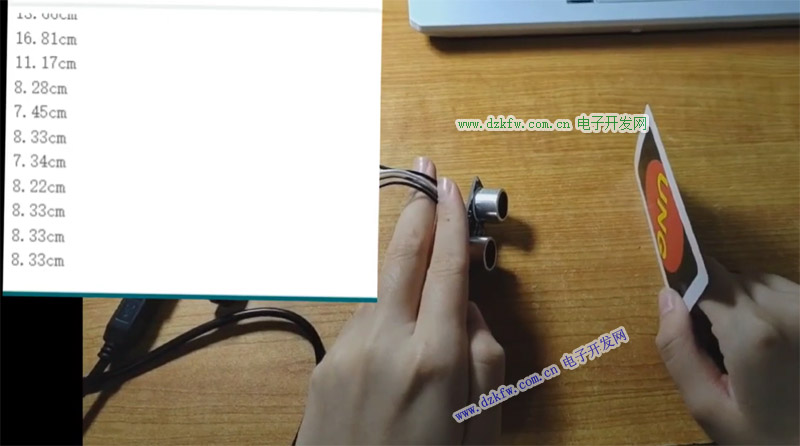
1.ų„ę¬ģóöĄ
vccŻ║5VļŖį┤
Trig:┐žųŲČ╦Ż©ė|░lŻ®
Echo:Įė╩šČ╦Ż©╗ž┬ĢŻ®
Gnd:ĮėĄžČ╦
╠Į£yŠÓļxŻ║2cmŻŁ450cm
Ėąæ¬ĮŪČ╚Ż║<15Č╚
╠Į£yŠ½Č╚Ż║0.3cm
2.╣żū„įŁ└Ē
const int TrigPin=8; //įOų├░l╔õ─_╬╗
const int EchoPin=9; //įOų├Įė╩š─_╬╗
float cm; //ĖĪ³cą═öĄō■ŅÉą═Ż©╝ėąĪöĄ³cŻ¼╠ßĖ▀Š½£╩Č╚Ż®
void setup() {
Serial.begin(9600);
pinMode(TrigPin,OUTPUT);
pinMode(EchoPin,INPUT);
}
void loop() {
digitalWrite(TrigPin,LOW); //ė├Ą═Ė▀Ą═ļŖŲĮ░l╦═├}ø_ĮoTrigpinę²─_
delayMicroseconds(2); //╬ó├ļ╝ēčėĢr
digitalWrite(TrigPin,HIGH);
delayMicroseconds(10);
digitalWrite(TrigPin,LOW);
cm=pulseIn(EchoPin,HIGH)/58.0; //ūx╚Ī├}ø_īÆČ╚Ż¼ōQ╦Ń│╔└Õ├ū
Serial.print(cm); //’@╩ŠŠÓļx
Serial.print("cm"); //’@╩Šå╬╬╗
Serial.println(); //╗ž▄ć
delay(1000);
}
Ī±constĄ─ū„ė├╩ŪīóČ©┴xĄ──_╬╗┤µā”į┌ų╗ūx┤µā”Ų„Ż¼╝┤┤µā”į┌UNO░ÕĄ─ė▓▒P«öųąŻ¼į┌▀\ąą▀^│╠ųą╣Ø╝sUNO░ÕĄ─┘Yį┤ĪŻ
į┌CšZčįųąŻ¼ĻPµIūųconstė├üĒČ©┴x│Ż┴┐Ż¼Ż¼╚ń╣¹ę╗éĆūā┴┐▒╗constą▐’ŚŻ¼─Ū├┤╦³Ą─ųĄŠ═▓╗─▄į┘Ė─ūāĪŻ
Ī±pulseIn║»öĄŲõīŹŠ═╩Ūę╗éĆ║åå╬Ą─£y┴┐├}ø_īÆČ╚Ą─║»öĄŻ¼─¼šJå╬╬╗╩Ūus=10^ŻŁ6sĪŻę▓Š═╩ŪšfpulseIn£y│÷üĒĄ─╩Ū│¼┬Ģ▓©Å─░l╔õĄĮĮė╩š╦∙Įø▀^Ą─ĢrķgĪŻī”ė┌│²öĄ58ę▓║▄║├└ĒĮŌŻ¼┬Ģę¶į┌Ė╔į’Īóöz╩Ž 20Č╚Ą─┐šÜŌųąĄ─é„▓ź╦┘Č╚┤¾╝s×ķ343├ū/├ļŻ¼║Ž34,300└Õ├ū/├ļĪŻ╗“š▀Ż¼╬ęéāū„ę╗Ž┬å╬╬╗ōQ╦ŃŻ¼34,300│²ęį1,000,000└Õ├ū/╬ó├ļĪŻ╝┤×ķŻ║0.0343└Õ├ū/╬ó├ļŻ¼į┘ōQę╗éĆĮŪČ╚Ż¼1/Ż©0.0343 └Õ├ū/╬ó├ļŻ®╝┤Ż║29.15 ╬ó├ļ/└Õ├ūĪŻ▀@Š═ęŌ╬Čų°Ż¼├┐291.5╬ó├ļ▒Ē╩Š10CMĄ─ŠÓļxĪŻ1└Õ├ūŠ═╩Ū29.15╬ó├ļĪŻĄ½╩Ū░l╦═║¾ĄĮĮė╩šĄĮ╗ž▓©Ż¼┬Ģę¶ū▀▀^Ą─╩Ū2▒ČĄ─ŠÓļxčĮĪŻ╦∙ęįīŹļHŠÓļxŠ═╩Ū1└Õ├ūŻ¼ī”æ¬58.3╬ó├ļĪŻīŹļH╔Žš¹éĆ£yŠÓ▀^│╠╩Ū£yĄ─░l│÷┬Ģ▓©ĄĮ╩šĄĮ╗ž▓©Ą─ĢrķgŻ¼─ŃĄ─│╠ą“└’Ą─Ą┌ę╗éĆdistanceīŹļH╔Ž╩ŪĢrķgusĪŻ╦∙ęįōQ│╔ŠÓļxcmŻ¼ę¬│²ęį58ĪŻ«ö╚╗│²ęį58.3┐╔─▄Ė³Š½┤_ĪŻ╦∙ęį╬ęéā┐╔ęįė├ pulseIn(EchoPin, HIGH) / 58.00½@╚Ī£yĄ├Ą─ŠÓļxĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū