
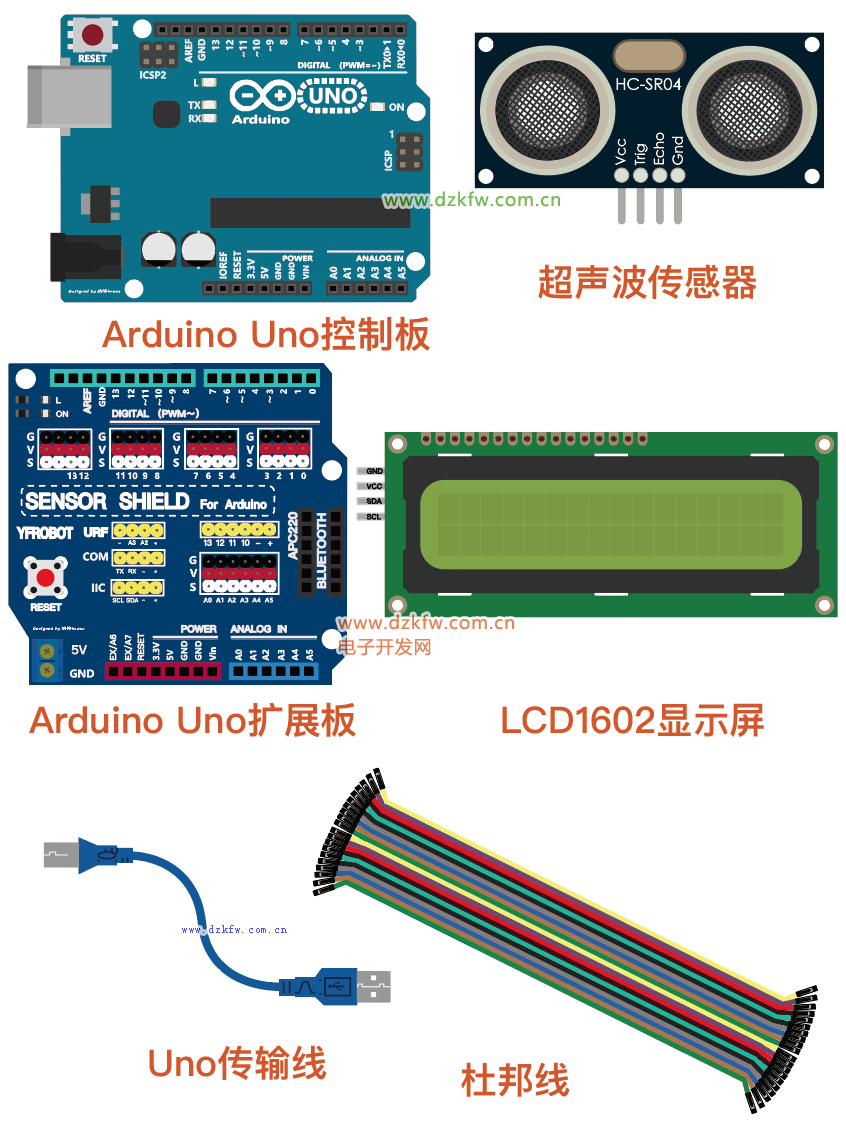
ė▓╝■ŪÕå╬
ę╗Īó│¼┬Ģ▓©£yŠÓįŁ└Ē
Č■ĪóHCSR04│¼┬Ģ▓©é„ĖąŲ„Ą─╩╣ė├
╚²ĪóLCD1602ę║Š¦’@╩ŠŲ┴Ą─╩╣ė├
1.Arduino╔ŽĄ─I2C═©ą┼ģfūh
2.╩╣ė├LCD1602ę║Š¦’@╩ŠŲ┴’@╩ŠĪ░Hello World!Ī▒ūųĘ¹
╦─Īó═Ļ│╔│¼┬Ģ▓©£yŠÓ
╬ÕĪó┐éĮY
ė▓╝■ŪÕå╬
ę╗Īó│¼┬Ģ▓©£yŠÓįŁ└Ē
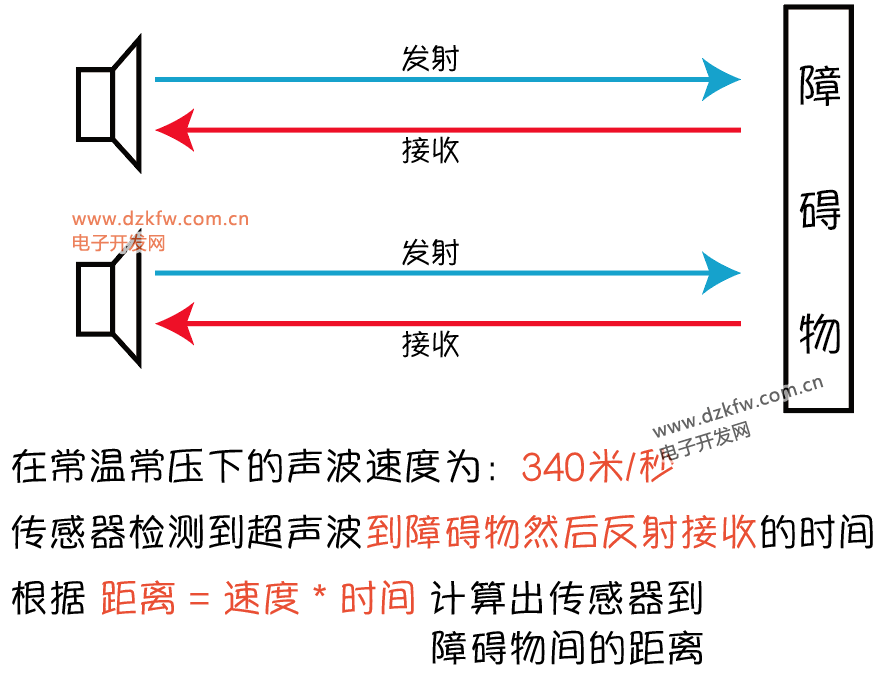
╬ęéā╦∙╩╣ė├Ą─│¼┬Ģ▓©é„ĖąŲ„ą═╠¢×ķHCSR04Ż¼┐╔ė^▓ņĄĮ╦¹ėąā╔éĆĪ░č█Š”Ī▒ĀŅĄ─▓┐╝■Ż¼ā╔éĆ▓┐╝■Ą─ū„ė├ę╗śėŻ¼Š∙┐╔░l╔õ║═Įė╩š│¼┬Ģ▓©Ż¼▓óŪę░┤šš╔Ž╩÷įŁ└ĒłD▀Mąą╣żū„ĪŻ
╩ūŽ╚é„ĖąŲ„░l╔õ│¼┬Ģ▓©Ż¼▓óėŗĢrŻ¼«ö│¼┬Ģ▓©Įėė|ĄĮšŽĄK╬’Ģ■▒╗Ę┤╔õŻ¼«öé„ĖąŲ„Įė╩šĄĮĘ┤╔õ▓©Ż¼ėŗĢrĮY╩°Ż¼╚╗║¾└¹ė├ŠÓļxĪó╦┘Č╚ĪóĢrķg╣½╩Š▀Mąąėŗ╦ŃŻ¼Ą├ĄĮé„ĖąŲ„ĄĮšŽĄK╬’ķgĄ─ŠÓļxĪŻ
ŲõŠ▀¾w╣żū„įŁ└Ē║åå╬┴╦ĮŌ╝┤┐╔Ż¼▓ó▓╗ė░Ēæ║¾╩÷ī”│¼┬Ģ▓©é„ĖąŲ„Ą─╩╣ė├ĪŻ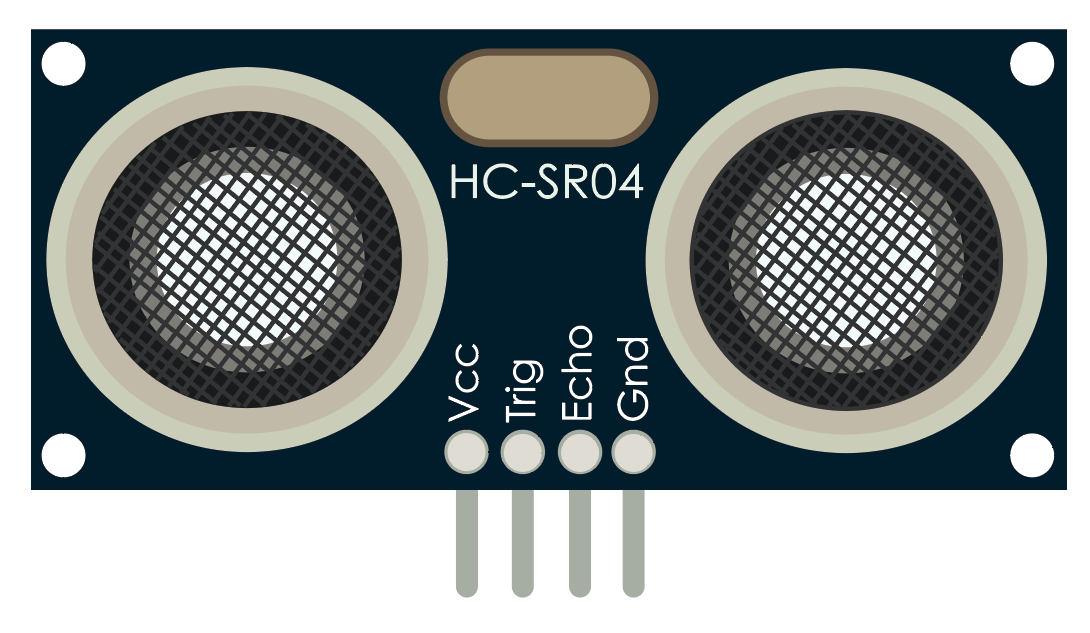
ę“┤╦HCSR04│¼┬Ģ▓©é„ĖąŲ„Ą─╦─éĆę²─_Ą─ū„ė├Š═▒╚▌^├„’@┴╦Ż¼│²┴╦VCCĮėš²śOĪóGNDĮėžōśO═ŌŻ¼▀Ćėąā╔éĆę²─_Ī░TrigĪ▒╝░Ī░EchoĪ▒Ż¼ŲõųąĪ░TrigĪ▒ė├ė┌┐žųŲ░l╔õ│¼┬Ģ▓©Ż¼Ī░EchoĪ▒ė├ė┌Įė╩šĘ┤╔õ▓©Ż¼╦∙ęįĪ░TrigĪ▒╦∙Įėę²─_æ¬×ķ▌ö│÷Ż¼Ī░EchoĪ▒╦∙Įėę²─_æ¬×ķ▌ö╚ļŻ¼ę“┤╦į┌║¾└mĮėŠĆĢr┐╔ęį░čā╔éĆę²─_ĘųäeĮėĄĮā╔éĆöĄūųČ╦┐┌Ż¼į┌Č╦┐┌│§╩╝╗»ĢrĘųäeįOų├▌ö╚ļ║═▌ö│÷╝┤┐╔ĪŻ
Č■ĪóHCSR04│¼┬Ģ▓©é„ĖąŲ„Ą─╩╣ė├
ĮėŽ┬üĒīóHCSR04│¼┬Ģ▓©é„ĖąŲ„┼cArduino▀Mąą▀BĮėŻ¼│²┴╦VCC╝░GNDĘųäeĮėš²žōśO═ŌŻ¼▀@└’Ī░TrigĪ▒┼cöĄūųČ╦┐┌D5▀BĮėŻ¼Ī░EchoĪ▒┼cöĄūųČ╦┐┌D4▀BĮėŻ¼╚ńŽ┬łD╦∙╩ŠŻ║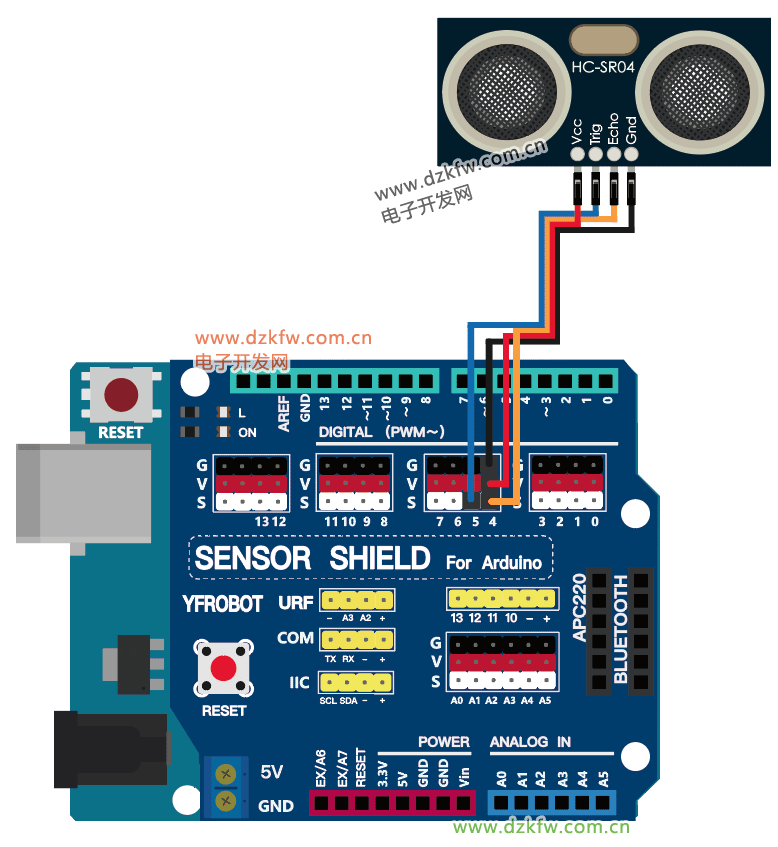
▓óŪę┤_Č©░▓čbĄ─Äņ╬─╝■╩Ūʱę╗ų┬Ż¼▓╗═¼Ą─ķ_░lš▀žĢ½IĄ─Äņ╬─╝■▓╗═¼Ż¼š{ė├ĘĮĘ©Ą─├¹ĘQę▓Š═▓╗═¼Ż¼ę“┤╦╚ń╣¹┼c▒Š╬─░┤čbĄ─Äņ╬─╝■▓╗═¼Ą─įÆŻ¼┤¾Ė┼┬╩Ģ■ł¾ÕeŻ¼Į©ūh░▓čb┼cŽ┬łDę╗ų┬Ą─Äņ╬─╝■ĪŻ
īó│¼┬Ģ▓©é„ĖąŲ„┼cArduino░Õ▀BĮėų«║¾Ż¼└^└m═Ļ│╔ęįŽ┬│╠ą“Ż║
//┤╦│╠ą“╣”─▄×ķīóSR04│¼┬Ģ▓©é„ĖąŲ„£yĄ─Ą─ŠÓļxöĄųĄŻ¼═©▀^┤«┐┌▀Mąą▌ö│÷
#include<HCSR04.h> //ī¦╚ļ│¼┬Ģ▓©SR04Äņ
HCSR04 ultrasonic(5,4); //┬Ģ├„ę╗éĆī”Ž¾Ż¼Ųõ├¹×ķultrasonicŻ©ūįČ©┴xĄ─├¹ĘQŻ®
//4╠¢×ķĪ░EchoĪ▒Ż¼5╠¢×ķĪ░TrigĪ▒
void setup()
{
pinMode(4, INPUT); //įOų├Ī░EchoĪ▒Įė╚ļĄ─ę²─_×ķ▌ö╚ļ
pinMode(5, OUTPUT); //įOų├Ī░TrigĪ▒Įė╚ļĄ─ę²─_×ķ▌ö│÷
Serial.begin(9600); //┤«┐┌▒OęĢŲ„│§╩╝╗»
}
int distance; //Č©┴xę╗éĆ├¹×ķĪ░distanceĪ▒Ą─ūā┴┐Ż¼ė├ė┌┤µĘ┼Öz£yĄ─ŠÓļxöĄųĄ
void loop()
{
distance = ultrasonic.dist(); //š{ė├┴╦│¼┬Ģ▓©Äņ└’Ą─Ī░dist()Ī▒ĘĮĘ©Ż¼½@Ą├Öz£yŠÓļxöĄųĄ
Serial.print(distance); //▌ö│÷distanceöĄųĄŻ¼Ūę▓╗ōQąą
Serial.println(" cm"); //ŠoĮėų°▌ö│÷å╬╬╗Ż¼ŪęōQąą
}
īó│╠ą“╔Žé„ų«Ū░Ž╚ī”ęį╔Ž│╠ą“Ą─▓┐Ęų┤·┤aēK▀MąąĮŌßīŻ║
1.Ī░HCSR04 ultrasonic(4, 5)Ī▒╬ęéāĘQų«×ķī”Ž¾Ą─īŹ└²╗»Ż¼╝┤HCSR04×ķ│¼┬Ģ▓©ÄņĄ─├¹ĘQŻ¼į┌Ųõ║¾ūįČ©┴xę╗éĆ├¹ĘQĪ░ultrasonicĪ▒Ż©╝┤│¼┬Ģ▓©Ą─ėó╬─Ż¼┐╔ūįČ©┴x╚╬ęŌ├¹ĘQŻ®Ż¼▓óŪę▓╗═¼Ą─īŹ└²╗»▀^│╠ėą▓╗═¼Ą─ģóöĄę¬▌ö╚ļŻ¼▒╚╚ńHCSR04║¾ąĶę¬╝ė╚ļĪ░TrigĪ▒║═Ī░EchoĪ▒╦∙Įėę²─_Ą─Č╦┐┌╠¢Ż¼Å─Č°į┌║¾╩÷│╠ą“ųąŻ¼╚ń╣¹ę¬š{ė├HCSR04Äņā╚Ą─ĘĮĘ©Ą─įÆŻ¼āHąĶ╩╣ė├Ī░ultrasonic.ĘĮĘ©├¹()Ī▒Ż¼╝┤┐╔ĪŻ
2.Ī░distance = ultrasonic.dist()Ī▒▀@ę╗┤·┤aēK╩Ūš{ė├┴╦│¼┬Ģ▓©é„ĖąŲ„ųą½@╚ĪŠÓļxĄ─ĘĮĘ©Ī░dist()Ī▒Ż¼┼cŪ░├µintČ©┴xĄ─distanceĮž╚╗▓╗═¼Ż¼intČ©┴xĄ─ūā┴┐┐╔╚Ī╚╬ęŌ├¹ĘQŻ¼āH×ķūā┴┐├¹Ż¼Ą½Ī░Distance()Ī▒×ķ│¼┬Ģ▓©é„ĖąŲ„╣╠Č©Ą─ĘĮĘ©ĪŻ
ĮėŽ┬üĒīó╔Ž╩÷│╠ą“╔Žé„ų┴Arduino░ÕŻ¼▓óŪę┤“ķ_┤«┐┌▒OęĢŲ„Ż¼ė^£y╦∙£yĄ─öĄųĄ╩Ūʱ£╩┤_ĪŻ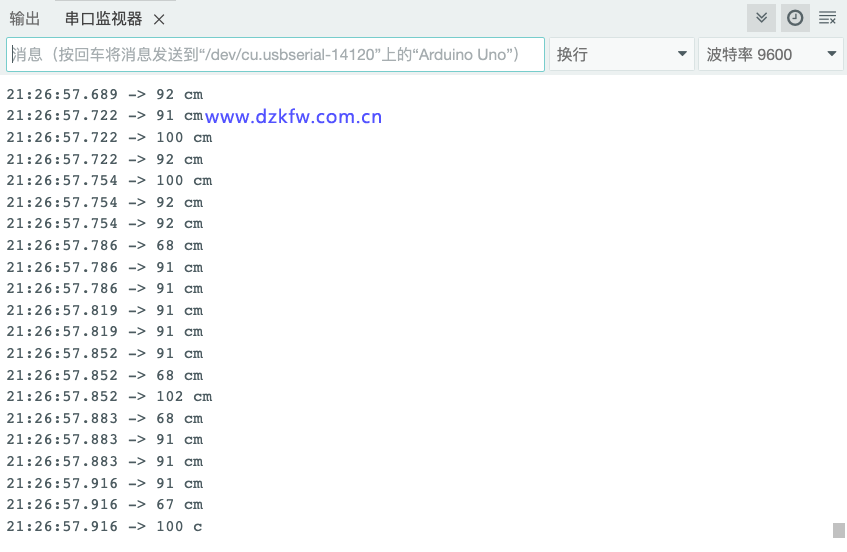
┴Ē═ŌHCSR04ą═╠¢Ą─│¼┬Ģ▓©é„ĖąŲ„Ą─£y┴┐ĘČć·╣┘ĘĮ┬ĢĘQ×ķ2cm Ī½ 450cmŻ¼ę“┤╦│¼│÷▀@éĆĘČć·Ą─öĄųĄĢ■▓╗£╩┤_ĪŻ
╚²ĪóLCD1602ę║Š¦’@╩ŠŲ┴Ą─╩╣ė├


╩ūŽ╚ė^▓ņLCD1602’@╩ŠŲ┴Ą─š²Ę┤├µŻ©ŲõųąĘ┤├µ×ķīŹ╬’łDŻ®Ż¼«öŪ░LCD’@╩ŠŲ┴Ą─“īäė░ÕŻ©╝┤║┌╔½Ą─ļŖ┬Ę░ÕŻ®╔Ž╣▓6éĆę²─_Ż¼ū¾é╚ā╔éĆŽÓÓÅĄ─ę²─_ų▒Įė▀BĮė╝┤┐╔Ż¼▀BĮė║¾▒Ń┤“ķ_┴╦▒│╣ŌŻ╗ėęé╚Ą─ę²─_Ī░GNDĮėžōśOĪ▒Ī░VCCĮėš²śOĪ▒ęčĮø▒╚▌^╩ņŽż┴╦Ż¼ī”ė┌Ī░SDAĪ▒╝░Ī░SCLĪ▒ę²─_Ż¼╬ęéāŽ╚ī”┤╦▀Mąąįö╝ÜĮķĮBĪŻ
1.Arduino╔ŽĄ─I2C═©ą┼ģfūh
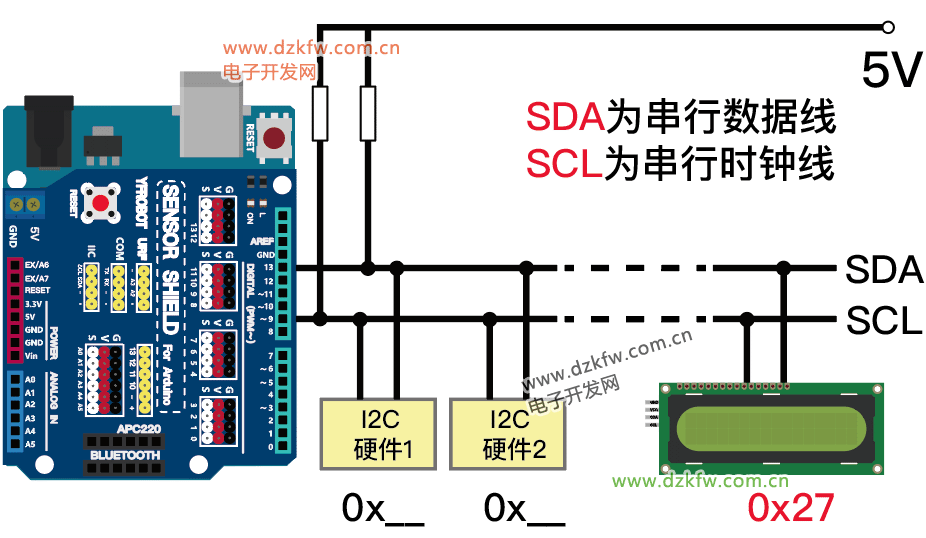
I2C┐éŠĆ╩Ūė╔Philips╣½╦Šķ_░lĄ─ę╗ĘN║åå╬ĪóļpŽ“Č■ŠĆųŲ═¼▓Į┤«ąą┐éŠĆĪŻ╦³ų╗ąĶę¬ā╔Ė∙ŠĆ╝┤┐╔į┌▀BĮėė┌┐éŠĆ╔ŽĄ─Ų„╝■ų«ķgé„╦═ą┼ŽóĪŻ
├┐ĘN▓╗═¼Ą─ė▓╝■Č╝ėą▓╗═¼Ą─I2CĄžųĘŻ¼ę“┤╦ī”ė┌I2C═©ą┼Ą─╣żū„įŁ└Ē╬ęéā┐╔ęį└ĒĮŌ×ķŻ║SCLŻ©ĢrńŖŠĆŻ®ė├ė┌ęÄČ©«öŪ░Ģr┐╠╩Ūʱę¬é„▌ööĄō■Ż¼Š═╚ń═¼╝tŠGą┼╠¢¤¶Ą─ū„ė├Ż¼Ę└ų╣öĄō■é„▌ö╗ņüyŻ╗SDAŻ©öĄō■ŠĆŻ®ė├ė┌į┌ĮoČ©Ģrķgā╚Įo▓╗═¼ĄžųĘĄ─ė▓╝■é„▌ööĄō■Ż¼▓óŪęļpŽ“é„▌öĪŻ«öŪ░╬ęéāāHąĶ┴╦ĮŌ▓╗═¼ė▓╝■Ą─I2CĄžųĘ╝┤┐╔▌p╦╔╩╣ė├I2C═©ą┼ĪŻ
2.╩╣ė├LCD1602ę║Š¦’@╩ŠŲ┴’@╩ŠĪ░Hello World!Ī▒ūųĘ¹
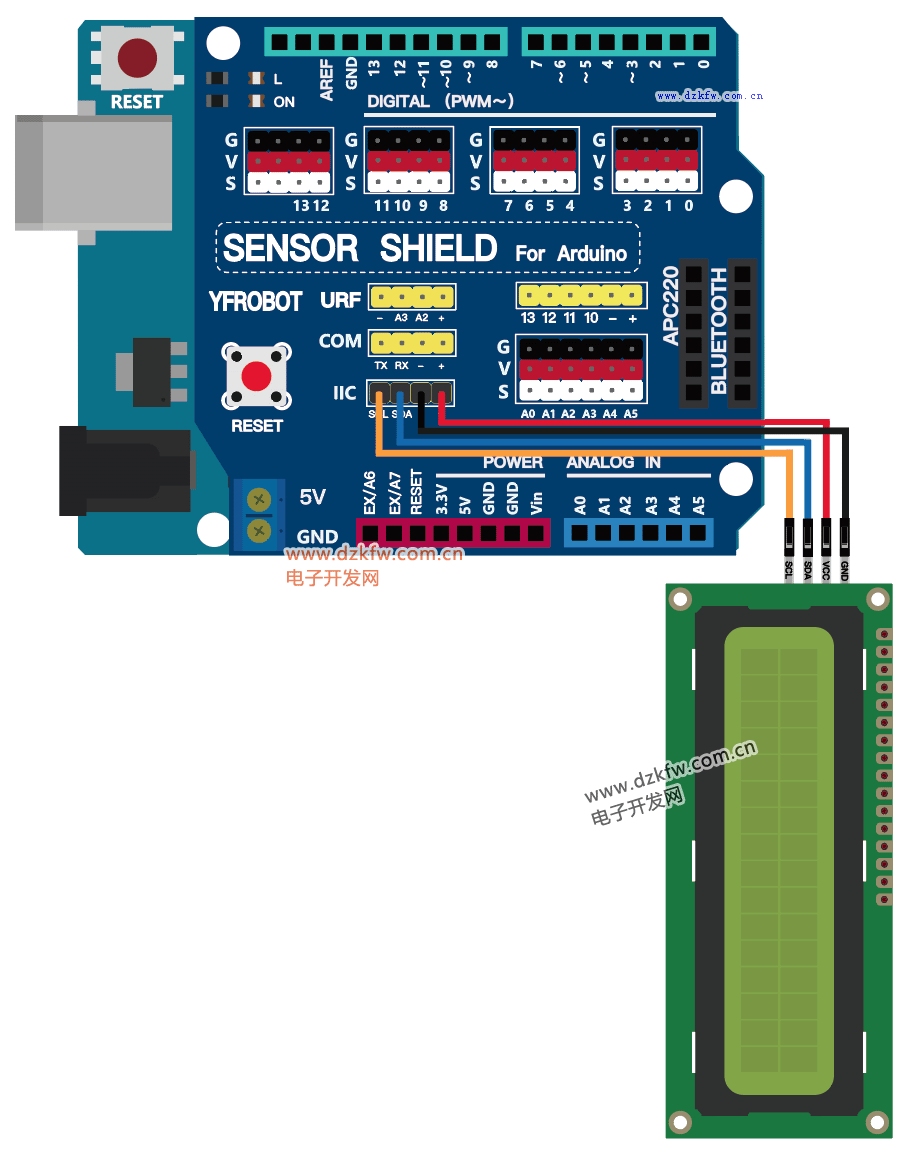
į┌Arduino═žš╣░ÕĄ─Å═╬╗µI┼į▀ģįOėąīŻķTĄ─I2Cę²─_Ż¼┐╔ų▒Įėī”æ¬▀BĮėŻ¼«ö╚╗ę▓┐╔ęįĪ░SDA - A4Ī▒Ī░SCL - A5Ī▒Ą─ŠĆą“▀BĮėĪŻ
▀BĮė║├ų«║¾ė^▓ņŲ┴─╗Ż¼į┌╬┤īæ╚ļ│╠ą“ų«Ū░Ż¼LCD’@╩ŠŲ┴Ą─Ą┌ę╗ąąæ¬įō╩Ū┐╔ęį’@╩Š16éĆąĪĘĮēKĄ─Ż¼╚ń╣¹╬┤’@╩ŠŻ¼ät╩╣ė├╩«ūų┬▌ĮzĄČüĒöQäė’@╩ŠŲ┴▒│░Õ╦{╔½Ą─ą²ŌoŻ¼ų▒ĄĮąĪĘĮēKŪÕ╬·┐╔ęŖĪŻ▀@ę▓Š═╩Ū×ķ╩▓├┤LCD1602’@╩ŠŲ┴ś╦ėąĪ░1602Ī▒Ī¬Ī¬┤╦’@╩ŠŲ┴┐╔’@╩Š16┴ą2ąąūųĘ¹Ż©ėó╬─Ż®ĪŻ
▒Šš┬╩╣ė├Ą─LCD’@╩ŠŲ┴×ķI2C═©ą┼Ż¼ę“┤╦╩╣ė├Ą─Äņ╬─╝■ę▓ąĶę¬ī”æ¬Ż¼┐╔┐┤Ž┬łD╩╣ė├Ą─Äņ╬─╝■Ż║
ĮėŽ┬üĒ═Ļ│╔Ž┬┴ą│╠ą“Ż║
//┤╦│╠ą“╣”─▄×ķ╩╣ė├LCD1602▌ö│÷Ī░Hello World!Ī▒ūųĘ¹
#include <Wire.h> //ī¦╚ļI2C═©ą┼Äņ
#include <LiquidCrystal_I2C.h> //ī¦╚ļLCD’@╩ŠŲ┴Äņ
LiquidCrystal_I2C lcd(0x27,16,2); //īŹ└²╗»ę╗éĆ├¹×ķĪ░lcdĪ▒Ą─ī”Ž¾Ż¼▓óŪęā╚▓┐ėą╚²éĆģóöĄ
//Ęųäe×ķŻ©I2C═©ą┼ĄžųĘŻ¼’@╩Š┴ąöĄŻ¼’@╩ŠąąöĄŻ®
void setup()
{
lcd.init(); //’@╩ŠŲ┴│§╩╝╗»
lcd.backlight(); //ķ_åó’@╩ŠŲ┴▒│╣Ō
lcd.setCursor(0,0); //įOų├’@╩Š╣Ōś╦╬╗ų├Ż©┴ąŻ¼ąąŻ®
lcd.print("Hello, world!"); //’@╩ŠūųĘ¹
lcd.setCursor(0,1); //į┌Ą┌ę╗┴ąŻ¼Ą┌Č■ąąķ_╩╝’@╩Š
lcd.print("Successful!"); //’@╩ŠūųĘ¹
}
void loop()
{
}
īóęį╔Ž│╠ą“╔Žé„Ż¼▓óė^▓ņ╩Ūʱ’@╩Š┴╦ā╔ąąūųĘ¹Ż¼Ęųäe╩ŪĪ░Hello, world!Ī▒╝░Ī░Successful!Ī▒Ż╗ĮėŽ┬üĒī”▓┐Ęų┤·┤aēK▀MąąĮŌßīŻ║
1.Ī░#include <Wire.h>Ī▒×ķī¦╚ļI2C═©ą┼ÄņĪŻ
2.Ī░#include <LiquidCrystal_I2C.h>Ī▒×ķī¦╚ļ▒Š│╠ą“╩╣ė├Ą─╗∙ė┌I2C═©ą┼ģfūhĄ─LCD’@╩ŠŲ┴ÄņĪŻ
3.Ī░LiquidCrystal_I2C lcd(0x27,16,2)Ī▒×ķīŹ└²╗»┴╦ę╗éĆ├¹×ķĪ░lcdĪ▒Ą─ī”Ž¾Ż¼▓óęÄČ©┴╦LCDĄ─I2CĄžųĘĪ░0x27Ī▒Ż¼ęį╝░’@╩ŠŲ┴’@╩ŠĄ─┴ąąąöĄĪŻ
Ųõ╦¹Ą─┤·┤aū„ė├Š∙ęčį┌│╠ą“ųą▀Mąą┴╦ūóßīĮŌßīŻ¼ät▓╗į┘┘ś╩÷ĪŻ
╦─Īó═Ļ│╔│¼┬Ģ▓©£yŠÓ
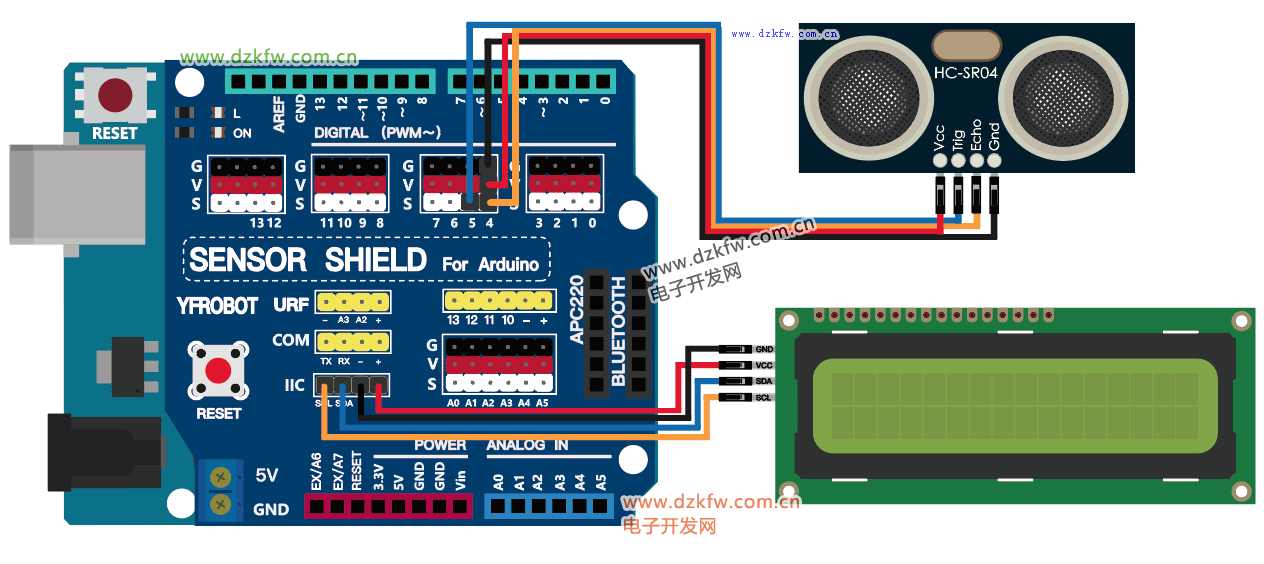
░┤šš╔ŽłDīóĪ░SR04│¼┬Ģ▓©é„ĖąŲ„Ī▒╝░Ī░LCD1602’@╩ŠŲ┴Ī▒┼cArduino░Õ▀Mąą▀BĮėŻ╗Ī░TrigĪ▒┼cöĄūųČ╦┐┌D5▀BĮėŻ¼Ī░EchoĪ▒┼cöĄūųČ╦┐┌D4▀BĮėŻ¼LCD’@╩ŠŲ┴Ą─ę²─_▀BĮėĄĮIICģ^ė“Ż╗╚╗║¾═Ļ│╔ęįŽ┬│╠ą“Ż║
//┤╦│╠ą“╣”─▄×ķīó│¼┬Ģ▓©é„ĖąŲ„£yĄ├Ą─öĄųĄ╩╣ė├LCD▀Mąą’@╩Š
//▓óŪęį┌2cm-450cmā╚š²│Ż’@╩ŠŻ¼│¼│÷ĘČć·ät▌ö│÷Õeš`╠ß╩Š
#include<HCSR04.h> //ī¦╚ļ│¼┬Ģ▓©SR04Äņ
#include<Wire.h> //ī¦╚ļI2C═©ą┼Äņ
#include<LiquidCrystal_I2C.h> //ī¦╚ļLCD’@╩ŠŲ┴Äņ
LiquidCrystal_I2C lcd(0x27,16,2); //┬Ģ├„╩╣ė├LCDÄņĄ─ī”Ž¾
HCSR04 ultrasonic(5,4); //┬Ģ├„ę╗éĆī”Ž¾Ż¼Ųõ├¹×ķultrasonicŻ©ūįČ©┴xĄ─├¹ĘQŻ®
//4╠¢×ķĪ░EchoĪ▒Ż¼5╠¢×ķĪ░TrigĪ▒
void setup()
{
lcd.init(); //’@╩ŠŲ┴│§╩╝╗»
lcd.backlight(); //ķ_åóLCD’@╩ŠŲ┴▒│╣Ō
pinMode(4,INPUT); //Echoę²─_
pinMode(5,OUTPUT); //Trigę²─_
}
int distance; //Č©┴xę╗éĆūā┴┐ė├ė┌┤µā”│¼┬Ģ▓©£y┴┐Ą─öĄųĄ
void loop()
{
distance = ultrasonic.dist(); //īó│¼┬Ģ▓©£yĄ├Ą─öĄųĄ┘xųĄĮoūā┴┐
if(distance >= 2 && distance <= 450) //┼ąöÓ£yĄ├öĄųĄ╩Ūʱį┌£y┴┐ĘČć·ā╚
{
lcd.setCursor(0,0); //įOų├LCD’@╩Š╣Ōś╦╬╗ų├
lcd.print(distance); //╩╣ė├LCD’@╩ŠŲ┴’@╩ŠdistanceĄ─öĄųĄ
lcd.print(" cm"); //’@╩Šå╬╬╗Ī░cmĪ▒
delay(200); //čėĢr200║┴├ļ
lcd.clear(); //LCD’@╩ŠŲ┴ŪÕŲ┴Ż¼ė├ė┌’@╩ŠŽ┬ę╗éĆöĄųĄ
}
else //╚ń╣¹│¼│÷ĘČć·
{
lcd.print("Wrong!"); //▌ö│÷Ī░WrongŻĪĪ▒
delay(200);
lcd.clear();
}
}
╔Ž╩÷│╠ą“╩Ūī”│¼┬Ģ▓©é„ĖąŲ„╝░LCD’@╩ŠŲ┴Ą─ŠC║Žæ¬ė├Ż¼▓óŪę╩╣ė├┴╦Ī░if┼ąöÓĪ▒Ż¼Ųõ┤·┤aēKĄ─ū„ė├Š∙ęčś╦ų∙ĄĮ┤·┤aģ^ė“Ż¼▓╗į┘įö╝ÜĮŌßīĪŻ
īó╔Ž╩÷┤·┤a▀Mąą╔Žé„Ż¼▓ó£yįć╩Ūʱ┐╔īŹ¼F│¼┬Ģ▓©£yŠÓ╣”─▄ĪŻ
╬ÕĪó┐éĮY
▒Šš┬╩╣ė├SR04│¼┬Ģ▓©é„ĖąŲ„ĮY║ŽLCDę║Š¦’@╩ŠŲ┴üĒīŹ¼F┴╦│¼┬Ģ▓©£yŠÓĄ─╣”─▄Ż╗▓óŪęī”ė┌│¼┬Ģ▓©é„ĖąŲ„╝░’@╩ŠŲ┴Č╝ąĶ꬚{ė├ŽÓæ¬Ą─Äņ╬─╝■▀Mąą┐žųŲŻ¼▀@└’ąĶę¬ūóęŌĄ─╩Ūę╗Č©ę¬╩╣ė├š²┤_Ą─Äņ╬─╝■Ż¼ę“×ķĖ„ŅÉė▓╝■Ą─Äņ╬─╝■Š∙üĒūįė┌▓╗═¼Ą─ķ_░lš▀Ż¼▓╗═¼Ą─ķ_░lš▀žĢ½IĄ─ÄņĢ■┤µį┌Äņ╬─╝■├¹ĘQ╝░ĘĮĘ©├¹▓╗═¼Ą─ŪķørŻ¼«ö╚╗└Ēšō╔Ž▓╗═¼Ą─Äņ╬─╝■Č╝─▄īŹ¼Fī”ė▓╝■Ą─┐žųŲŻ¼╦∙ęįūŅ║├╩╣ė├┼c▒Š╬─ŽÓ═¼Ą─Äņ╬─╝■ĪŻ═Ļ│╔▒Šš┬Ą─│¼┬Ģ▓©£yŠÓ╣”─▄ų«║¾Ż¼▓╗Ę┴┬ōŽļŲ¹▄ćĄ─Ą╣▄ć└ū▀_įŁ└ĒŻ¼Ųõ╣”─▄ę▓╩Ū┐╔ęį═©▀^ArduinoŲĮ┼_üĒīŹ¼FĄ─Ż¼║¾└m▀ĆĢ■ĦüĒĖ³ČÓė▓╝■Ą─╩╣ė├ĘĮĘ©╝░ĮM║Ž│╔═Ļš¹╣”─▄Ą─Į╠īWĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū