

1 ę²čį
PLC▌ö│÷Ą─╝»│╔├}ø_┐╔═©▀^▓Į▀MļŖÖC▀MąąČ©╬╗┐žųŲĪŻĻP(gu©Īn)ė┌Č©╬╗┐žųŲŻ¼š{(di©żo)╣Ø(ji©”)║═┐žųŲ▓┘ū„ų«ķg┤µį┌ę╗ą®ģ^(q©▒)äeĪŻ▓Į▀MļŖÖC▓╗ąĶę¬▀B└m(x©┤)Ą─╬╗ų├┐žųŲŻ¼Č°į┌┐žųŲ▓┘ū„ųąĄ├ĄĮæ¬ė├ĪŻį┌ęįŽ┬Ą─│╠ą“└²ūėųąŻ¼ĮĶų·ė┌CPU214╦∙«a(ch©Żn)╔·Ą─╝»│╔├}ø_▌ö│÷Ż¼═©▀^▓Į▀MļŖÖCüĒīŹ¼F(xi©żn)ŽÓī”Ą─╬╗ų├┐žųŲĪŻļm╚╗▀@ĘNŅÉą═Ą─Č©╬╗┐žųŲ▓╗ąĶę¬ģó┐╝³cŻ¼▒Š└²▀Ć╩Ū┤ų┬įĄž├Ķ╩÷┴╦┤_Č©ģó┐╝³cĄ─║åå╬▓Į¾EĪŻę“×ķīŹļH╔Ž╦³┐é╩ŪŽÓī”ę╗Ė∙▌S┤_Č©ę╗éĆ╣╠Č©Ą─ģó┐╝³cŻ¼ę“┤╦Ż¼ė├æ¶ĮĶų·ė┌ę╗éĆ▌ö╚ļūų╣Ø(ji©”)Ą─ī”┼╝┤a(Dual coding)ĮoCPUųĖČ©Č©╬╗ĮŪČ╚ĪŻė├æ¶│╠ą“Ė∙ō■(j©┤)įō┤aėŗ╦Ń│÷╦∙ąĶĄ─Č©╬╗▓ĮöĄ(sh©┤)Ż¼į┘ė╔CPU▌ö│÷ŽÓĻP(gu©Īn)éĆöĄ(sh©┤)Ą─┐žųŲ├}ø_ĪŻ
2 ŽĄĮy(t©»ng)ĮY(ji©”)śŗ(g©░u)
╚ńłD1╦∙╩ŠĪŻ
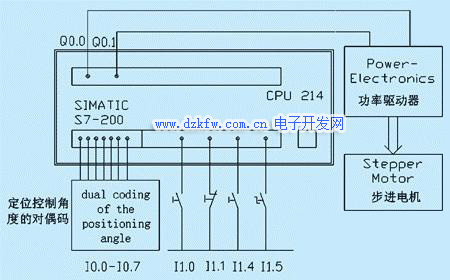
łD1 ŽĄĮy(t©»ng)ĮY(ji©”)śŗ(g©░u)
3 ė▓╝■┼õų├
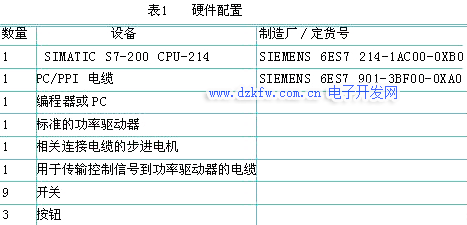
╚ń▒Ē1╦∙╩ŠĪŻ
4 ▄ø╝■ĮY(ji©”)śŗ(g©░u)
4.1 PLCĄ─▌ö╚ļą┼╠¢┼c▌ö│÷ą┼╠¢
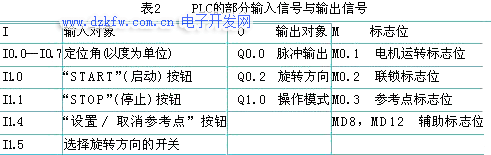
PLCĄ─▓┐Ęų▌ö╚ļą┼╠¢┼c▌ö│÷ą┼╠¢Ż¼ęį╝░ś╦ųŠ╬╗╚ń▒Ē2╦∙╩ŠĪŻ
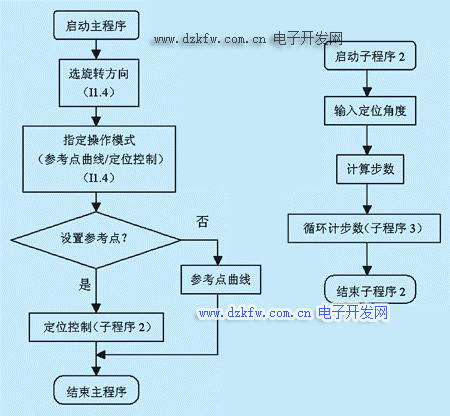
4.2 ŽĄĮy(t©»ng)▄ø╝■įO(sh©©)ėŗ
PLCĄ─│╠ą“┐“łD╚ńłD2╦∙╩ŠĪŻ
4.3 │§╩╝╗»
į┌│╠ą“Ą─Ą┌ę╗éĆÆ▀├Ķų▄Ų┌(SM0.1=1)Ż¼│§╩╝╗»ųžę¬ģóöĄ(sh©┤)ĪŻ▀xō±ą²▐D(zhu©Żn)ĘĮŽ“║═ĮŌ│²┬ō(li©ón)µiĪŻ
4.4 įO(sh©©)ų├║═╚ĪŽ¹ģó┐╝³c
╚ń╣¹▀Ćø]ėą┤_Č©ģó┐╝³cŻ¼─Ū├┤ģó┐╝³cŪ·ŠĆæ¬Å─░┤Ī░STARTĪ▒░┤┼ż(I1.0)ķ_╩╝ĪŻCPUėą┐╔─▄▌ö│÷ūŅ┤¾öĄ(sh©┤)┴┐Ą─┐žųŲ├}ø_ĪŻį┌╦∙ąĶĄ─ģó┐╝³cŻ¼░┤Ī░įO(sh©©)ų├/╚ĪŽ¹ģó┐╝³cĪ▒ķ_ĻP(gu©Īn)(I1.4)║¾Ż¼╩ūŽ╚š{(di©żo)ė├═Żų╣ļŖÖCĄ─ūė│╠ą“ĪŻ╚╗║¾Ż¼īóģó┐╝³cś╦ųŠ╬╗M0.3ų├│╔1Ż¼į┘░čą┬Ą─▓┘ū„─Ż╩ĮĪ░Č©╬╗┐žųŲ╝ż╗ŅĪ▒’@╩Šį┌▌ö│÷Č╦Q1.0ĪŻ
╚ń╣¹I1.4Ą─ķ_ĻP(gu©Īn)ęč╝ż╗ŅŻ¼Č°ŪęĪ░Č©╬╗┐žųŲĪ▒ę▓▒╗╝ż╗Ņ(M0.3=1)Ż¼ätŪąōQĄĮĪ░ģó┐╝³cŪ·ŠĆĪ▒ģó┐╝³cŪ·ŠĆĪŻį┌ūė│╠ą“1ųąŻ¼īóM0.3ų├│╔0Ż¼▓ó╚ĪŽ¹Ī░Č©╬╗┐žųŲ╝ż╗ŅĪ▒Ą─’@╩Š(Q1.0=0)ĪŻ┤╦═ŌŻ¼┐žųŲ▀Ć×ķ▌ö│÷ūŅ┤¾öĄ(sh©┤)┴┐Ą─┐žųŲ├}ø_ū÷£╩éõĪŻ«öį┘┤╬╝ż╗ŅI(l©½ng)1.4ķ_ĻP(gu©Īn)Ż¼▒Ńį┌ā╔éĆ─Ż╩Įų«ķgŪąōQĪŻ╚ń╣¹┤╦ą┼╠¢«a(ch©Żn)╔·Ż¼═¼ĢrļŖÖCį┌▀\▐D(zhu©Żn)Ż¼─Ū├┤ļŖÖCŠ═ūįäė═Żų╣ĪŻ
īŹļH╔ŽŻ¼ę╗éĆ┼c“ī(q©▒)äėŲ„▀BĮėĄ─ģó┐╝³cķ_ĻP(gu©Īn)īó┤·╠µ╩ųäė▓┘ū„ŪąōQķ_ĻP(gu©Īn)Ą─╩╣ė├Ż¼╦∙ęįŻ¼ģó┐╝³cś╦ųŠ─▄ĮŌøQ─Ż╩ĮŪąōQĪŻ
4.5 Č©╬╗┐žųŲ
╚ń╣¹┤_Č©┴╦ę╗éĆģó┐╝³c(M0.3=1)Č°Ūęø]ėą┬ō(li©ón)µiŻ¼─Ū├┤Š═ł╠(zh©¬)ąąŽÓī”Ą─Č©╬╗┐žųŲĪŻį┌ūė│╠ą“2ųąŻ¼┐žųŲŲ„Å─▌ö╚ļūų╣Ø(ji©”)IBOūx│÷ī”┼╝┤aĘĮ╩ĮĄ─Č©╬╗ĮŪČ╚║¾Ż¼į┘┤µ╚ļūų╣Ø(ji©”)MB11ĪŻ┼c┤╦ĮŪČ╚ėąĻP(gu©Īn)Ą─├}ø_öĄ(sh©┤)Ż¼Ė∙ō■(j©┤)Ž┬├µĄ─╣½╩Įėŗ╦Ń:
N=”š/360ĪŃĪ┴S
╩Įųą:N-┐žųŲ├}ø_öĄ(sh©┤)
”š-ą²▐D(zhu©Żn)ĮŪČ╚
S-├┐▐D(zhu©Żn)╦∙ąĶĄ─▓ĮöĄ(sh©┤)
įō│╠ą“╦∙╩╣ė├Ą─▓Į▀MļŖÖC▓╔ė├░ļ▓Į▓┘ū„ĘĮ╩Į(S=1000)ĪŻį┌ūė│╠ą“3ųąčŁŁh(hu©ón)ėŗ╦Ń▓ĮöĄ(sh©┤)Ż¼╚ń╣¹¼F(xi©żn)į┌░┤Ī░STARTĪ▒░┤Ōo(I1.0)Ż¼CPUīóÅ─▌ö│÷Č╦Q0.0▌ö│÷╦∙ėŗ╦ŃĄ─┐žųŲ├}ø_éĆöĄ(sh©┤)Ż¼Č°ŪęļŖÖCīóĖ∙ō■(j©┤)ŽÓæ¬Ą─▓ĮöĄ(sh©┤)üĒ▐D(zhu©Żn)äėŻ¼▓óį┌ā╚(n©©i)▓┐īóĪ░ļŖÖC▐D(zhu©Żn)äėĪ▒Ą─ś╦ųŠ╬╗M0.1ų├│╔1ĪŻ
į┌═Ļš¹Ą─├}ø_▌ö│÷ų«║¾Ż¼ł╠(zh©¬)ąąųąöÓ│╠ą“0Ż¼┤╦│╠ą“?q©▒)óM0.1ų├│╔0Ż¼ęį▒Ń─▄ē“į┘┤╬ŲäėļŖÖCĪŻ
4.6 ═Żų╣ļŖÖC
░┤Ī░STOPĪ▒(═Żų╣)░┤┼ż(I1.1)Ż¼┐╔į┌╚╬║╬Ģr║“═Żų╣ļŖÖCĪŻł╠(zh©¬)ąąūė│╠ą“0ųą┼c┤╦ėąĻP(gu©Īn)Ą─ųĖ┴ŅĪŻ
5 │╠ą“║═ūóßī
//ś╦Ņ}:ė├├}ø_▌ö│÷▀MąąČ©╬╗┐žųŲ
//ų„│╠ą“
LD SM0.1
//āH╩ū┤╬Æ▀├Ķų▄Ų┌SM0.1▓┼×ķ1ĪŻ
R M0.0Ż¼128
//MD0ų┴MD12Å═╬╗
ATCH 0Ż¼19
//░čųąöÓ│╠ą“0Ęų┼õĮoųąöÓ╩┬╝■19(├}ø_┤«ĮKų╣)
ENI
//į╩įSųąöÓ
//├}ø_▌ö│÷╣”─▄Ą─│§╩╝╗»
MOVW 500Ż¼SMW68
//├}ø_ų▄Ų┌T=500us
MOVW 0,SMW70
//├}ø_īÆČ╚×ķ0(├}ø_š{(di©żo)ųŲ)
MOVD 429496700Ż¼SMD72
//×ķģó┐╝³cįO(sh©©)Č©Ą─ūŅ┤¾├}ø_öĄ(sh©┤)
//įO(sh©©)ų├─µĢrßśą²▐D(zhu©Żn)
LDN M0.1 //╚¶ļŖÖC═Żų╣
A I1.5 //Ūęą²▐D(zhu©Żn)ĘĮŽ“ķ_ĻP(gu©Īn)=1
S Q0.2Ż¼1 //ät─µĢrßśą²▐D(zhu©Żn)(Q0.2=1)
//įO(sh©©)ų├ĒśĢrßśą²▐D(zhu©Żn)
LDN M0.1 //╚¶ļŖÖC═Żų╣
AN I1.5 //Ūęą²▐D(zhu©Żn)ĘĮŽ“ķ_ĻP(gu©Īn)=0
R Q0.2Ż¼1 //ät─µĢrßśą²▐D(zhu©Żn)(Q0.2=0)
//┬ō(li©ón)µi
LD I1.1
//╚¶░┤Ī░STOPĪ▒(═Żų╣)░┤Ōo
S M0.2Ż¼1 //ät╝ż╗Ņ┬ō(li©ón)µi(M0.2=1)
//ĮŌ│²┬ō(li©ón)µi
LDN I1.1
//╚¶Ī░STARTĪ▒(åóäė)░┤Ōo╦╔ķ_
AN I1.0
//ŪęĪ░STOPĪ▒(═Żų╣)░┤Ōo╦╔ķ_
R M0.2Ż¼1 //ätĮŌ│²┬ō(li©ón)µi(M0.2=0)
//┤_Č©▓┘ū„─Ż╩Į(ģó┐╝³cČ©╬╗┐žųŲ)
LD I1.4
//╚¶░┤Ī░įO(sh©©)ų├/╚ĪŽ¹ģó┐╝³cĪ▒░┤Ōo
EU //╔Ž╔²čž
CALL 1 //ätš{(di©żo)ė├ūė│╠ą“1
//åóäėļŖÖC
LD I1.0
//╚¶░┤Ī░STARTĪ▒(åóäė)░┤Ōo
EU //╔Ž╔²čž
AN M0.1 //ŪęļŖÖC═Żų╣
AN M0.2 //Ūę¤o┬ō(li©ón)µi
ADĪ▌ SMD72Ż¼1
//Ūę▓ĮöĄ(sh©┤)Ī▌1Ż¼ät
MOVB 16#85Ż¼SMB67
//ų├├}ø_▌ö│÷╣”─▄(PTO)Ą─┐žųŲ╬╗
PLS 0 //åóäė├}ø_▌ö│÷(Q0.0)
S M0.1Ż¼1
//Ī░ļŖÖC▀\ąąĪ▒ś╦ųŠ╬╗ų├╬╗(M0.1=1)
//Č©╬╗┐žųŲ
LD M0.3
//╚¶ęč╝ż╗ŅĪ░Č©╬╗┐žųŲĪ▒ ▓┘ū„─Ż╩Į
AN M0.1 //ŪęļŖÖC═Żų╣
CALL 2 //ätš{(di©żo)ė├ūė│╠ą“2
//═Żų╣ļŖÖC
LD I1.1
//╚¶░┤Ī░STOPĪ▒(═Żų╣)░┤Ōo
EU //╔Ž╔²čž
A M0.1 //ŪęļŖÖC▀\ąąŻ¼ät
CALL 0 //ätš{(di©żo)ė├ūė│╠ą“0
MEND //ų„│╠ą“ĮY(ji©”)╩°
//ūė│╠ą“1
SBR 0 //ūė│╠ą“0═Żų╣ļŖÖC
MOVB 16#CBŻ¼SMB67
//╝ż╗Ņ├}īÆš{(di©żo)ųŲ
PLS 0 //═Żų╣▌ö│÷├}ø_ĄĮQ0.0
R M0.1Ż¼1
//Ī░ļŖÖC▀\ąąĪ▒ś╦ųŠ╬╗Å═╬╗(M0.1=0)
RET //ūė│╠ą“0ĮY(ji©”)╩°
SBR1
//ūė│╠ą“1Ż¼Ī░┤_Č©▓┘ū„─Ż╩ĮĪ▒
LD M0.1 //╚¶ļŖÖC▀\ąą
CALL 0
//ätš{(di©żo)ė├ūė│╠ą“0Ż¼═Żų╣ļŖÖC
//╔ĻšłĪ░ģó┐╝³cŪ·ŠĆĪ▒
LD M0.3
//╚¶ęč╝ż╗ŅĪ░Č©╬╗┐žųŲĪ▒Ż¼ät
R M0.3Ż¼1
//ģó┐╝³cś╦ųŠ╬╗;Å═╬╗(M0.3=0)
R Q1.0Ż¼1
//╚ĪŽ¹Ī░Č©╬╗┐žųŲ╝ż╗ŅĪ▒ą┼Žó(Q1.0=0)
MOVD 429496700Ż¼SMD72
//×ķą┬Ą─Ī░ģó┐╝³cŪ·ŠĆĪ▒įO(sh©©)Č©ūŅ┤¾Ą─├}ø_öĄ(sh©┤)ĪŻ
CRET
//Śl╝■ĘĄ╗žĄĮų„│╠ą“ĪŻ
//╔ĻšłĪ░Č©╬╗┐žųŲĪ▒
LDN M0.3
//╚¶╬┤įO(sh©©)ų├ģó┐╝³c(M0.3=0)Ż¼ät
S M0.3Ż¼1
//ģó┐╝³cś╦ųŠ╬╗ų├╬╗(M0.3=1)
S Q1.0Ż¼1
//▌ö│÷Ī░Č©╬╗┐žųŲ╝ż╗ŅĪ▒ą┼Žó(Q1.0=1)
RET //ūė│╠ą“1ĮY(ji©”)╩°
//ūė│╠ą“2
SBR2 //ūė│╠ą“2Ż¼Ī░Č©╬╗┐žųŲĪ▒
MOVB IB0Ż¼MB11
//░čČ©╬╗ĮŪČ╚Å─IBO┐ĮĄĮMD8Ą─ūŅĄ═ėąą¦ūų╣Ø(ji©”)MB11ĪŻ
R M8.0Ż¼24
//MB8ų┴MB10ŪÕ┴Ń
DIV 9Ż¼MD8
//ĮŪČ╚/9=q1+r1
MOVW MW8Ż¼MW14
//░čr1┤µ╚ļMD12
MUL 25Ż¼MD8
//q1Ī┴25Ī·MD8
MUL 25Ż¼MD12
DIV 9Ż¼MD12
// r1Ī┴25Ż»9= q2+r2
CALL 3
//į┌ūė│╠ą“3ųąčŁŁh(hu©ón)▓ĮöĄ(sh©┤)
MOVW 0Ż¼MW12 //äh│²r2
+D MD12Ż¼MD8
//░č▓ĮöĄ(sh©┤)īæ╚ļMD8
MOVD MD8Ż¼SMD72
//░č▓ĮöĄ(sh©┤)é„ĄĮSMD72
RET //ūė│╠ą“2ĮY(ji©”)╩°
//ūė│╠ą“3
SBR3 //ūė│╠ą“3Ż¼Ī░裣h(hu©ón)▓ĮöĄ(sh©┤)Ī▒
LDWĪ▌MW12Ż¼5 //╚ń╣¹r2Ī▌5Ż»9Ż¼ät
INCW MW14 //▓ĮöĄ(sh©┤)į÷╝ė1ĪŻ
RET
//ūė│╠ą“3ĮY(ji©”)╩°
//ųąöÓ│╠ą“0Ż¼Ī░├}ø_▌ö│÷ĮKų╣Ī▒
INT0 //ųąöÓ│╠ą“0
R M0.1Ż¼1
//Ī░ļŖÖC▀\ąąĪ▒ś╦ųŠ╬╗Å═╬╗(M0.1=0)
RET //ūė│╠ą“0ĮY(ji©”)╩°
6 ĮY(ji©”)╩°šZ
═©▀^ī”ė▓╝■║═▄ø╝■Ą─║Ž└ĒįO(sh©©)ėŗŻ¼ė├▌^×ķār┴«Ą─╬„ķTūėS7-200ŽĄ┴ąPLCū„×ķ║╦ą─┐žųŲ▓┐╝■Ż¼śŗ(g©░u)│╔Ą─Č©╬╗ŽĄĮy(t©»ng)─▄ē“▀_ĄĮŠ½┤_Č©╬╗Ą──┐Ą─ĪŻ╠žäeæ¬ųĖ│÷Ą─╩Ū═©▀^ņ`╗ŅĪóŪ╔├ŅĄ─æ¬ė├PLCĄ─ųĖ┴ŅŽĄĮy(t©»ng)Ż¼┐╔╩╣ŽĄĮy(t©»ng)īŹ¼F(xi©żn)Ė▀Š½Č╚Č©╬╗ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū