
╚¶šf«öŽ┬Ą─¤ßķT┐Ų╝╝Ż¼ÖCŲ„╚╦Į^ī”╦Ńę╗éĆĪŻÖCŲ„╚╦ū„×ķĄõą═Ą─ÖCļŖę╗¾w╗»╝╝ąg├▄╝»ą═«a(ch©Żn)ŲĘŻ¼╦³╩Ū╚ń║╬īŹ¼F(xi©żn)▀\ū„Ą──žŻ┐
ÖCŲ„╚╦Ą─┐žųŲĘų×ķÖCąĄ▒Š¾w┐žųŲ║═╦┼Ę■ÖCśŗ┐žųŲā╔┤¾ŅÉŻ¼╦┼Ę■┐žųŲŽĄĮy(t©»ng)ät╩ŪīŹ¼F(xi©żn)ÖCŲ„╚╦ÖCąĄ▒Š¾w┐žųŲ║═╦┼Ę■ÖCśŗ┐žųŲĄ─ųžę¬▓┐ĘųĪŻę“Č°ę¬┴╦ĮŌÖCŲ„╚╦Ą─▀\ū„▀^│╠Ż¼▒ž╚╗└@▓╗▀^╦┼Ę■ŽĄĮy(t©»ng)ĪŻ
╦┼Ę■ŽĄĮy(t©»ng)
╦┼Ę■ŽĄĮy(t©»ng)╩ŪęįūāŅl╝╝ąg×ķ╗∙ĄA░l(f©Ī)š╣ŲüĒĄ─«a(ch©Żn)ŲĘŻ¼╩Ūę╗ĘNęįÖCąĄ╬╗ų├╗“ĮŪČ╚ū„×ķ┐žųŲī”Ž¾Ą─ūįäė┐žųŲŽĄĮy(t©»ng)ĪŻ╦┼Ę■ŽĄĮy(t©»ng)│²┴╦┐╔ęį▀Mąą╦┘Č╚┼c▐DŠž┐žųŲ═ŌŻ¼▀Ć┐╔ęį▀MąąŠ½┤_Īó┐ņ╦┘ĪóĘĆ(w©¦n)Č©Ą─╬╗ų├┐žųŲĪŻ
ÅV┴xĄ─╦┼Ę■ŽĄĮy(t©»ng)╩ŪŠ½┤_ĄžĖ·█Ö╗“Å═¼F(xi©żn)─│éĆĮoČ©▀^│╠Ą─┐žųŲŽĄĮy(t©»ng)Ż¼ę▓┐╔ĘQū„ļSäėŽĄĮy(t©»ng)ĪŻ¬M┴x╦┼Ę■ŽĄĮy(t©»ng)ėųĘQ╬╗ų├ļSäėŽĄĮy(t©»ng)Ż¼Ųõ▒╗┐žųŲ┴┐Ż©▌ö│÷┴┐Ż®╩Ūžō▌dÖCąĄ┐šķg╬╗ų├Ą─ŠĆ╬╗ęŲ╗“ĮŪ╬╗ęŲŻ¼«ö╬╗ų├ĮoČ©┴┐Ż©▌ö╚ļ┴┐Ż®ū„╚╬ęŌūā╗»ĢrŻ¼ŽĄĮy(t©»ng)Ą─ų„ę¬╚╬äš╩Ū╩╣▌ö│÷┴┐┐ņ╦┘Č°£╩┤_ĄžÅ═¼F(xi©żn)ĮoČ©┴┐Ą─ūā╗»ĪŻ
ę╗Īó╦┼Ę■ŽĄĮy(t©»ng)Ą─ĮYśŗĮM│╔
ÖCļŖę╗¾w╗»Ą─╦┼Ę■┐žųŲŽĄĮy(t©»ng)Ą─ĮYśŗĪóŅÉą═Ę▒ČÓŻ¼Ą½Å─ūįäė┐žųŲ└ĒšōĄ─ĮŪČ╚üĒĘų╬÷Ż¼╦┼Ę■┐žųŲŽĄĮy(t©»ng)ę╗░Ń░³└©┐žųŲŲ„Īó▒╗┐žī”Ž¾Īół╠(zh©¬)ąąŁh(hu©ón)╣Ø(ji©”)ĪóÖz£yŁh(hu©ón)╣Ø(ji©”)Īó▒╚▌^Łh(hu©ón)╣Ø(ji©”)Ą╚╬Õ▓┐ĘųĪŻ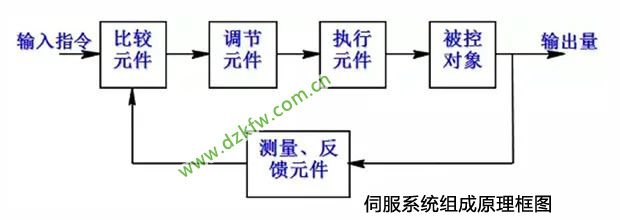
╦┼Ę■ŽĄĮy(t©»ng)ĮM│╔įŁ└Ē┐“łD
▒╚▌^Łh(hu©ón)╣Ø(ji©”)╩Ūīó▌ö╚ļĄ─ųĖ┴Ņą┼╠¢┼cŽĄĮy(t©»ng)Ą─Ę┤üą┼╠¢▀Mąą▒╚▌^Ż¼ęį½@Ą├▌ö│÷┼c▌ö╚ļķgĄ─Ų½▓Ņą┼╠¢Ą─Łh(hu©ón)╣Ø(ji©”)Ż¼═©│Żė╔īŻķTĄ─ļŖ┬Ę╗“ėŗ╦ŃÖCüĒīŹ¼F(xi©żn)ĪŻ
2┐žųŲŲ„┐žųŲŲ„═©│Ż╩Ūėŗ╦ŃÖC╗“PIDŻ©▒╚└²ĪóĘeĘų║═╬óĘųŻ®┐žųŲļŖ┬ĘŻ¼Ųõų„ę¬╚╬äš╩Ūī”▒╚▌^į¬╝■▌ö│÷Ą─Ų½▓Ņą┼╠¢▀MąąūāōQ╠Ä└ĒŻ¼ęį┐žųŲł╠(zh©¬)ąąį¬╝■░┤ę¬Ū¾äėū„ĪŻ
3ł╠(zh©¬)ąąŁh(hu©ón)╣Ø(ji©”)
ł╠(zh©¬)ąąŁh(hu©ón)╣Ø(ji©”)Ą─ū„ė├╩Ū░┤┐žųŲą┼╠¢Ą─ę¬Ū¾Ż¼īó▌ö╚ļĄ─Ė„ĘNą╬╩ĮĄ──▄┴┐▐D╗»│╔ÖCąĄ─▄Ż¼“īäė▒╗┐žī”Ž¾╣żū„ĪŻÖCļŖę╗¾w╗»ŽĄĮy(t©»ng)ųąĄ─ł╠(zh©¬)ąąį¬╝■ę╗░ŃųĖĖ„ĘNļŖÖC╗“ę║ē║ĪóÜŌäė╦┼Ę■ÖCśŗĄ╚ĪŻ
4▒╗┐žī”Ž¾
▒╗┐žī”Ž¾ųĖ▒╗┐žųŲĄ─╬’╝■Ż¼└²╚ńę╗éĆÖCąĄ╩ų ▒█Ż¼╗“╩Ūę╗éĆÖCąĄ╣żū„ŲĮ┼_ĪŻ
5Öz£yŁh(hu©ón)╣Ø(ji©”)
Öz£yŁh(hu©ón)╣Ø(ji©”)╩ŪųĖ─▄ē“ī”▌ö│÷▀Mąą£y┴┐▓ó▐DōQ│╔▒╚▌^Łh(hu©ón)╣Ø(ji©”)╦∙ąĶꬥ─┴┐ŠVĄ─čbų├Ż¼ę╗░Ń░³└©é„ĖąŲ„║═▐DōQļŖ┬ĘĪŻ
Č■Īó╦┼Ę■ŽĄĮy(t©»ng)Ą─╠ž³c║═╣”ė├
╦┼Ę■ŽĄĮy(t©»ng)┼cę╗░ŃÖC┤▓Ą─▀MĮoŽĄĮy(t©»ng)ėą▒Š┘|╔Ž▓ŅäeŻ¼╦³─▄Ė∙ō■(j©┤)ųĖ┴Ņą┼╠¢Š½┤_Ąž┐žųŲł╠(zh©¬)ąą▓┐╝■Ą─▀\äė╦┘Č╚┼c╬╗ų├ĪŻ╦┼Ę■ŽĄĮy(t©»ng)╩ŪöĄ(sh©┤)┐žčbų├║═ÖC┤▓Ą─┬ō(li©ón)ŽĄŁh(hu©ón)╣Ø(ji©”)Ż¼╩ŪöĄ(sh©┤)┐žŽĄĮy(t©»ng)Ą─ųžę¬ĮM│╔Ż¼Š▀ėąęįŽ┬╠ž³cŻ║
* ▒žĒÜŠ▀éõĖ▀Š½Č╚Ą─é„ĖąŲ„Ż¼─▄£╩┤_ĄžĮo│÷▌ö│÷┴┐Ą─ļŖą┼╠¢ĪŻ* ╣”┬╩Ę┼┤¾Ų„ęį╝░┐žųŲŽĄĮy(t©»ng)Č╝▒žĒÜ╩Ū┐╔─µĄ─ĪŻ* ūŃē“┤¾Ą─š{╦┘ĘČć·╝░ūŃē“ÅŖĄ─Ą═╦┘Ħ▌dąį─▄ĪŻ* ┐ņ╦┘Ą─Ēææ¬─▄┴”║═▌^ÅŖĄ─┐╣Ė╔ö_─▄┴”ĪŻ
╚²Īó╦┼Ę■ŽĄĮy(t©»ng)Ą─ŅÉą═
Ī░░┤┐žųŲįŁ└ĒĘųŻ║ėąķ_Łh(hu©ón)Īóķ]Łh(hu©ón)║═░ļķ]Łh(hu©ón)╚²ĘNą╬╩ĮĪŻ
░┤▒╗┐žųŲ┴┐ąį┘|ĘųŻ║ėą╬╗ęŲĪó╦┘Č╚Īó┴”║═┴”ŠžĄ╚╦┼Ę■ŽĄĮy(t©»ng)ą╬╩ĮĪŻ
░┤“īäėĘĮ╩ĮĘųŻ║ėąļŖÜŌĪóę║ē║║═ÜŌē║Ą╚╦┼Ę■“īäėą╬╩ĮĪŻ
░┤ł╠(zh©¬)ąąį¬╝■ĘųŻ║ėą▓Į▀MļŖÖC╦┼Ę■Īóų▒┴„ļŖÖC╦┼Ę■║═Į╗┴„ļŖÖC╦┼Ę■ą╬╩Į
╦─Īó╦┼Ę■ŽĄĮy(t©»ng)Ą─ł╠(zh©¬)ąąį¬╝■
░┤╦∙▓╔ė├Ą─ł╠(zh©¬)ąąį¬╝■Ą─▓╗═¼Ż¼┐╔īó╦┼Ę■ŽĄĮy(t©»ng)Ęų│╔ļŖÜŌ╩ĮĪóę║ē║╩ĮĪóÜŌē║╩Į╝░Ųõ╦¹╦┼Ę■ŽĄĮy(t©»ng)ĪŻļŖÜŌ╦┼Ę■ŽĄĮy(t©»ng)▓╔ė├╦┼Ę■ļŖäėÖCū„×ķł╠(zh©¬)ąąį¬╝■Ż¼į┌ÖCļŖę╗¾w╗»«a(ch©Żn)ŲĘųąæ¬ė├▒╚▌^ÅVĘ║ĪŻ
1ļŖÜŌ╩Įł╠(zh©¬)ąąį¬╝■
ļŖÜŌł╠(zh©¬)ąąį¬╝■░³└©ų▒┴„Ż©DCŻ®╦┼Ę■ļŖÖCĪóĮ╗┴„Ż©ACŻ®╦┼Ę■ļŖÖCĪó▓Į▀MļŖÖCęį╝░ļŖ┤┼ĶFĄ╚Ż¼╩ŪūŅ│Żė├Ą─ł╠(zh©¬)ąąį¬╝■ĪŻī”╦┼Ę■ļŖÖC│²┴╦ę¬Ū¾▀\▐DŲĮĘĆ(w©¦n)ęį═ŌŻ¼ę╗░Ń▀Ćę¬Ū¾äėæB(t©żi)ąį─▄║├Ż¼▀m║Žė┌ŅlĘ▒╩╣ė├Ż¼▒Ńė┌ŠSą▐Ą╚ĪŻ
2ę║ē║╩Įł╠(zh©¬)ąąį¬╝■
ę║ē║╩Įł╠(zh©¬)ąąį¬╝■ų„ę¬░³└©═∙Å═▀\äėė═ĖūĪó╗ž▐Dė═ĖūĪóę║ē║±R▀_Ą╚Ż¼Ųõųąė═ĖūūŅ×ķ│ŻęŖĪŻį┌═¼Ą╚▌ö│÷╣”┬╩Ą─ŪķørŽ┬Ż¼ę║ē║į¬╝■Š▀ėąųž┴┐▌pĪó┐ņ╦┘ąį║├Ą╚╠ž³cĪŻ
3ÜŌē║╩Įł╠(zh©¬)ąąį¬╝■
ÜŌē║╩Įł╠(zh©¬)ąąį¬╝■│²┴╦ė├ē║┐s┐šÜŌū„╣żū„Įķ┘|═ŌŻ¼┼cę║ē║╩Įł╠(zh©¬)ąąį¬╝■ø]ėąģ^(q©▒)äeĪŻÜŌē║“īäėļm┐╔Ą├ĄĮ▌^┤¾Ą─“īäė┴”Īóąą│╠║═╦┘Č╚Ż¼Ą½ė╔ė┌┐šÜŌš│ąį▓ŅŻ¼Š▀ėą┐╔ē║┐sąįŻ¼╣╩▓╗─▄į┌Č©╬╗Š½Č╚ę¬Ū¾▌^Ė▀Ą─ł÷║Ž╩╣ė├ĪŻ
╬ÕĪó╚²ĘNŅÉą═Ą─ģ^(q©▒)äe
│Żė├Ą─┐žųŲļŖÖC
┐žųŲė├ļŖÖC╩ŪļŖÜŌ╦┼Ę■┐žųŲŽĄĮy(t©»ng)Ą─äė┴”▓┐╝■ĪŻ╦³╩ŪīóļŖ─▄▐DōQ×ķÖCąĄ─▄Ą─ę╗ĘN─▄┴┐▐DōQčbų├ĪŻÖCļŖę╗¾w╗»«a(ch©Żn)ŲĘųą│Żė├Ą─┐žųŲė├ļŖÖC╩ŪųĖ─▄╠ß╣®š²┤_▀\äė╗“▌^Å═ļsäėū„Ą─╦┼Ę■ļŖÖCĪŻ┐žųŲė├ļŖÖCėą╗ž▐D║═ų▒ŠĆ“īäėļŖÖCŻ¼═©▀^ļŖē║ĪóļŖ┴„ĪóŅl┬╩Ż©░³└©ųĖ┴Ņ├}ø_Ż®Ą╚┐žųŲŻ¼īŹ¼F(xi©żn)Č©╦┘Īóūā╦┘“īäė╗“Ę┤Å═åóäėĪó═Żų╣Ą─į÷┴┐“īäėęį╝░Å═ļsĄ─“īäėŻ¼Č°“īäėŠ½Č╚ļS“īäėī”Ž¾Ą─▓╗═¼Č°▓╗═¼ĪŻ╦┼Ę■“īäėļŖÖCę╗░Ń╩ŪųĖŻ║▓Į▀MļŖÖCŻ©Stepping MotorŻ®Īóų▒┴„╦┼Ę■ļŖÖCŻ©DC Servo MotorŻ®ĪóĮ╗┴„╦┼Ę■ļŖÖCŻ©AC Servo MotorŻ®ĪŻ
│Żė├╦┼Ę■┐žųŲļŖäėÖCĄ─┐žųŲĘĮ╩Įų„ę¬ėąŻ║ķ_Łh(hu©ón)┐žųŲĪó░ļķ]Łh(hu©ón)┐žųŲĪóķ]Łh(hu©ón)┐žųŲ╚²ĘNĪŻķ]Łh(hu©ón)ŽĄĮy(t©»ng)Ą─“īäėŽĄĮy(t©»ng)Š▀ėą╬╗ų├Ż©╗“╦┘Č╚Ż®Ę┤üŁh(hu©ón)╣Ø(ji©”)Ż╗ķ_Łh(hu©ón)ŽĄĮy(t©»ng)ø]ėą╬╗ų├┼c╦┘Č╚Ę┤üŁh(hu©ón)╣Ø(ji©”)ĪŻ
ę╗Īóķ_Łh(hu©ón)öĄ(sh©┤)┐žŽĄĮy(t©»ng)
ø]ėą╬╗ų├£y┴┐čbų├Ż¼ą┼╠¢┴„╩Ūå╬Ž“Ą─Ż©öĄ(sh©┤)┐žčbų├Ī·▀MĮoŽĄĮy(t©»ng)Ż®Ż¼╣╩ŽĄĮy(t©»ng)ĘĆ(w©¦n)Č©ąį║├ĪŻ
¤o╬╗ų├Ę┤üŻ¼Š½Č╚ŽÓī”ķ]Łh(hu©ón)ŽĄĮy(t©»ng)üĒųv▓╗Ė▀Ż¼ŲõŠ½Č╚ų„ę¬╚ĪøQė┌╦┼Ę■“īäėŽĄĮy(t©»ng)║═ÖCąĄé„äėÖCśŗĄ─ąį─▄║═Š½Č╚ĪŻę╗░Ńęį╣”┬╩▓Į▀MļŖÖCū„×ķ╦┼Ę■“īäėį¬╝■ĪŻ▀@ŅÉŽĄĮy(t©»ng)Š▀ėąĮYśŗ║åå╬Īó╣żū„ĘĆ(w©¦n)Č©Īóš{įćĘĮ▒ŃĪóŠSą▐║åå╬ĪóārĖ±Ą═┴«Ą╚ā×(y©Łu)³cŻ¼į┌Š½Č╚║═╦┘Č╚ę¬Ū¾▓╗Ė▀Īó“īäė┴”Šž▓╗┤¾Ą─ł÷║ŽĄ├ĄĮÅVĘ║æ¬ė├ĪŻę╗░Ńė├ė┌Įø(j©®ng)Ø·ą═öĄ(sh©┤)┐žÖC┤▓ĪŻ
Č■Īó░ļķ]Łh(hu©ón)öĄ(sh©┤)┐žŽĄĮy(t©»ng)
░ļķ]Łh(hu©ón)öĄ(sh©┤)┐žŽĄĮy(t©»ng)Ą─╬╗ų├▓╔śė³c╚ńłD╦∙╩ŠŻ¼╩ŪÅ─“īäėčbų├Ż©│Żė├╦┼Ę■ļŖÖCŻ®╗“ĮzĖ▄ę²│÷Ż¼▓╔śėą²▐DĮŪČ╚▀MąąÖz£yŻ¼▓╗╩Ūų▒ĮėÖz£y▀\äė▓┐╝■Ą─īŹļH╬╗ų├ĪŻ
![░ļķ]Łh(hu©ón)öĄ(sh©┤)┐žŽĄĮy(t©»ng)](/jichu/UploadFiles_6678/202311/2023111810040605.jpg)
░ļķ]Łh(hu©ón)Łh(hu©ón)┬Ęā╚▓╗░³└©╗“ų╗░³└©╔┘┴┐ÖCąĄé„äėŁh(hu©ón)╣Ø(ji©”)Ż¼ę“┤╦┐╔½@Ą├ĘĆ(w©¦n)Č©Ą─┐žųŲąį─▄Ż¼ŲõŽĄĮy(t©»ng)Ą─ĘĆ(w©¦n)Č©ąįļm▓╗╚ńķ_Łh(hu©ón)ŽĄĮy(t©»ng)Ż¼Ą½▒╚ķ]Łh(hu©ón)ę¬║├ĪŻė╔ė┌ĮzĖ▄Ą─┬▌ŠÓš`▓Ņ║═²X▌åķgŽČę²ŲĄ─▀\äėš`▓ŅļyęįŽ¹│²ĪŻę“┤╦Ż¼ŲõŠ½Č╚▌^ķ]Łh(hu©ón)▓ŅŻ¼▌^ķ_Łh(hu©ón)║├ĪŻĄ½┐╔ī”▀@ŅÉš`▓Ņ▀MąąčaāöŻ¼ę“Č°╚į┐╔½@Ą├ØMęŌĄ─Š½Č╚ĪŻ░ļķ]Łh(hu©ón)öĄ(sh©┤)┐žŽĄĮy(t©»ng)ĮYśŗ║åå╬Īóš{įćĘĮ▒ŃĪóŠ½Č╚ę▓▌^Ė▀Ż¼ę“Č°į┌¼F(xi©żn)┤·CNCÖC┤▓ųąĄ├ĄĮ┴╦ÅVĘ║æ¬ė├ĪŻ
╚²Īó╚½ķ]Łh(hu©ón)öĄ(sh©┤)┐žŽĄĮy(t©»ng)
╚½ķ]Łh(hu©ón)öĄ(sh©┤)┐žŽĄĮy(t©»ng)Ą─╬╗ų├▓╔śė³c╚ńłDĄ─╠ōŠĆ╦∙╩ŠŻ¼ų▒Įėī”▀\äė▓┐╝■Ą─īŹļH╬╗ų├▀MąąÖz£yĪŻ![╚½ķ]Łh(hu©ón)öĄ(sh©┤)┐žŽĄĮy(t©»ng)](/jichu/UploadFiles_6678/202311/2023111810045055.jpg)
Å─└Ēšō╔ŽųvŻ¼┐╔ęįŽ¹│²š¹éĆ“īäė║═é„äėŁh(hu©ón)╣Ø(ji©”)Ą─š`▓ŅĪóķgŽČ║═╩¦äė┴┐ĪŻŠ▀ėą║▄Ė▀Ą─╬╗ų├┐žųŲŠ½Č╚ĪŻė╔ė┌╬╗ų├Łh(hu©ón)ā╚Ą─įSČÓÖCąĄé„äėŁh(hu©ón)╣Ø(ji©”)Ą──”▓┴╠žąįĪóäéąį║═ķgŽČČ╝╩ŪĘŪŠĆąįĄ─Ż¼╣╩║▄╚▌ęūįņ│╔ŽĄĮy(t©»ng)Ą─▓╗ĘĆ(w©¦n)Č©Ż¼╩╣ķ]Łh(hu©ón)ŽĄĮy(t©»ng)Ą─įOėŗĪó░▓čb║═š{įćČ╝ŽÓ«ö└¦ļyĪŻ
įōŽĄĮy(t©»ng)ų„ę¬ė├ė┌Š½Č╚ę¬Ū¾║▄Ė▀Ą─ńMŃŖ┤▓Īó│¼Š½▄ć┤▓Īó│¼Š½─ź┤▓ęį╝░▌^┤¾ą═Ą─öĄ(sh©┤)┐žÖC┤▓Ą╚ĪŻ
ÖCŲ„╚╦Ą─╦┼Ę■ŽĄĮy(t©»ng)
═©│ŻŪķørŽ┬Ż¼╬ęéā╦∙šfĄ─ÖCŲ„╚╦╦┼Ę■ŽĄĮy(t©»ng)╩ŪųĖæ¬ė├ė┌ČÓ▌S▀\äė┐žųŲĄ─Š½├▄╦┼Ę■ŽĄĮy(t©»ng)ĪŻę╗éĆČÓ▌S▀\äė┐žųŲŽĄĮy(t©»ng)╩Ūė╔Ė▀ļA▀\äė┐žųŲŲ„┼cĄ═ļA╦┼Ę■“īäėŲ„╦∙ĮM│╔Ż¼▀\äė┐žųŲŲ„žōž¤▀\äė┐žųŲ├³┴Ņūg┤aĪóĖ„éĆ╬╗ų├┐žųŲ▌S▒╦┤╦ķgĄ─ŽÓī”▀\äėĪó╝ė£p╦┘▌å└¬┐žųŲĄ╚Ż¼Ųõų„ę¬ū„ė├į┌ė┌ĮĄĄ═š¹¾wŽĄĮy(t©»ng)▀\äė┐žųŲĄ─┬ĘÅĮš`▓ŅŻ╗╦┼Ę■“īäėŲ„žōž¤╦┼Ę■ļŖÖCĄ─╬╗ų├┐žųŲŻ¼Ųõų„ę¬ū„ė├į┌ė┌ĮĄĄ═╦┼Ę■▌SĄ─ūĘļSš`▓ŅĪŻ
ÖCŲ„╚╦Ą─╦┼Ę■ŽĄĮy(t©»ng)ė╔╦┼Ę■ļŖÖCĪó╦┼Ę■“īäėŲ„ĪóųĖ┴ŅÖCśŗ╚²┤¾▓┐Ęųśŗ│╔ĪŻ╦┼Ę■ļŖÖC╩Ūł╠(zh©¬)ąąÖCśŗŻ¼Š═╩Ū┐┐╦³üĒīŹ¼F(xi©żn)▀\äėĄ─Ż¼╦┼Ę■“īäėŲ„╩Ū╦┼Ę■ļŖÖCĄ─╣”┬╩ļŖį┤Ż¼ųĖ┴ŅÖCśŗ╩Ū░l(f©Ī)├}ø_╗“š▀Įo╦┘Č╚ė├ė┌┼õ║Ž╦┼Ę■“īäėŲ„š²│Ż╣żū„Ą─ĪŻ
ÖCŲ„╚╦ī”╦┼Ę■ļŖÖCĄ─ę¬Ū¾▒╚Ųõ╦³ā╔éĆ▓┐ĘųČ╝Ė▀ĪŻ
╩ūŽ╚ę¬Ū¾╦┼Ę■ļŖÖCŠ▀ėą┐ņ╦┘Ēææ¬ąįĪŻļŖÖCÅ─½@Ą├ųĖ┴Ņą┼╠¢ĄĮ═Ļ│╔ųĖ┴Ņ╦∙ę¬Ū¾Ą─╣żū„ĀŅæB(t©żi)Ą─Ģrķgæ¬Č╠ĪŻĒææ¬ųĖ┴Ņą┼╠¢Ą─Ģrķgė·Č╠Ż¼ļŖ╦┼Ę■ŽĄĮy(t©»ng)Ą─ņ`├¶ąįė·Ė▀Ż¼┐ņ╦┘Ēææ¬ąį─▄ė·║├Ż¼ę╗░Ń╩Ūęį╦┼Ę■ļŖÖCĄ─ÖCļŖĢrķg│ŻöĄ(sh©┤)Ą─┤¾ąĪüĒšf├„╦┼Ę■ļŖÖC┐ņ╦┘Ēææ¬Ą─ąį─▄ĪŻŲõ┤╬Ż¼╦┼Ę■ļŖÖCĄ─Ųäė▐DŠžæT┴┐▒╚ę¬┤¾ĪŻį┌“īäėžō▌dĄ─ŪķørŽ┬Ż¼ę¬Ū¾ÖCŲ„╚╦Ą─╦┼Ę■ļŖÖCĄ─Ųäė▐DŠž┤¾Ż¼▐DäėæT┴┐ąĪĪŻūŅ║¾Ż¼╦┼Ę■ļŖÖCꬊ▀ėą┐žųŲ╠žąįĄ─▀B└m(x©┤)ąį║═ų▒ŠĆąįŻ¼ļSų°┐žųŲą┼╠¢Ą─ūā╗»Ż¼ļŖÖCĄ─▐D╦┘─▄▀B└m(x©┤)ūā╗»Ż¼ėąĢr▀ĆąĶ▐D╦┘┼c┐žųŲą┼╠¢│╔š²▒╚╗“Į³╦Ų│╔š²▒╚ĪŻ«ö╚╗Ż¼×ķ┴╦┼õ║ŽÖCŲ„╚╦Ą─¾wą╬Ż¼╦┼Ę■ļŖÖC▒žĒܾwĘeąĪĪó┘|┴┐ąĪĪó▌SŽ“│▀┤ńČ╠ĪŻ▀Ćę¬Įø(j©®ng)╩▄Ą├Ų┐┴┐╠Ą─▀\ąąŚl╝■Ż¼┐╔▀Mąą╩«ĘųŅlĘ▒Ą─š²Ę┤Ž“║═╝ė£p╦┘▀\ąąŻ¼▓ó─▄į┌Č╠Ģrķgā╚│ą╩▄öĄ(sh©┤)▒Č▀^▌dĪŻ
╦┼Ę■“īäėŲ„╩Ū┐╔└¹ė├Ė„ĘNļŖÖC«a(ch©Żn)╔·Ą─┴”Šž║═┴”Ż¼ų▒Įė╗“ķgĮėĄž“īäėÖCŲ„╚╦▒Š¾węį½@Ą├ÖCŲ„╚╦Ą─Ė„ĘN▀\äėĄ─ł╠(zh©¬)ąąÖCśŗŻ¼Š▀ėą▐DŠž▐DäėæT┴┐▒╚Ė▀Īó¤oļŖ╦ó╝░ōQŽ“╗╗©Ą╚ā×(y©Łu)³cŻ¼į┌ÖCŲ„╚╦ųąæ¬ė├▒╚▌^ÅVĘ║ĪŻ
╦┼Ę■ŽĄĮy(t©»ng)Ą─░l(f©Ī)š╣┌ģä▌
ļSų°╦┼Ę■ŽĄĮy(t©»ng)Ą─æ¬ė├įĮüĒįĮÅVŻ¼ė├æ¶ī”╦┼Ę■“īäė╝╝ągĄ─ę¬Ū¾ę▓įĮüĒįĮĖ▀ĪŻ┐éĄ─üĒšfŻ¼╦┼Ę■ŽĄĮy(t©»ng)Ą─░l(f©Ī)š╣┌ģä▌┐╔ęįĖ┼└©×ķęįŽ┬ÄūéĆĘĮ├µŻ║╝»│╔╗»Ż║╦┼Ę■┐žųŲŽĄĮy(t©»ng)Ą─▌ö│÷Ų„╝■įĮüĒįĮČÓĄž▓╔ė├ķ_ĻPŅl┬╩║▄Ė▀Ą─ą┬ą═╣”┬╩░ļī¦¾wŲ„╝■Ż¼▀@ĘNŲ„╝■īó▌ö╚ļĖ¶ļxĪó─▄║─ųŲäėĪó▀^£žĪó▀^ē║Īó▀^┴„▒Żūo╝░╣╩šŽį\öÓĄ╚╣”─▄╚½▓┐╝»│╔ė┌ę╗éĆ▓╗┤¾Ą──ŻēKų«ųąŻ¼śŗ│╔Ė▀Š½Č╚Ą─╚½ķ]Łh(hu©ón)š{╣Ø(ji©”)ŽĄĮy(t©»ng)ĪŻĖ▀Č╚Ą─╝»│╔╗»’@ų°Ąž┐sąĪ┴╦š¹éĆ┐žųŲŽĄĮy(t©»ng)Ą─¾wĘeĪŻųŪ─▄╗»Ż║╦┼Ę■ŽĄĮy(t©»ng)Ą─ųŪ─▄╗»▒Ē¼F(xi©żn)į┌ęįŽ┬ÄūéĆĘĮ├µŻ║ŽĄĮy(t©»ng)Ą─╦∙ėą▀\ąąģóöĄ(sh©┤)Č╝┐╔ęį═©▀^╚╦ÖCī”įÆĄ─ĘĮ╩Įė╔▄ø╝■üĒįOų├;╦³éāČ╝Š▀ėą╣╩šŽūįį\öÓ┼cĘų╬÷╣”─▄;ģóöĄ(sh©┤)ūįš¹Č©Ą─╣”─▄Ą╚ĪŻÄ¦ėąūįš¹Č©╣”─▄Ą─╦┼Ę■å╬į¬┐╔ęį═©▀^Äū┤╬įć▀\ąąŻ¼ūįäėīóŽĄĮy(t©»ng)Ą─ģóöĄ(sh©┤)š¹Č©│÷üĒŻ¼▓óūįäėīŹ¼F(xi©żn)ŲõūŅā×(y©Łu)╗»ĪŻŠW(w©Żng)Įj╗»Ż║╦┼Ę■ŽĄĮy(t©»ng)ŠW(w©Żng)Įj╗»╩ŪŠC║Žūįäė╗»╝╝ąg░l(f©Ī)š╣Ą─▒ž╚╗┌ģä▌Ż¼╩Ū┐žųŲ╝╝ągĪóėŗ╦ŃÖC╝╝ąg║══©ą┼╝╝ągŽÓĮY║ŽĄ─«a(ch©Żn)╬’ĪŻ║åęū╗»Ż║▀@└’╦∙šfĄ─Ī░║åĪ▒▓╗╩Ū║åå╬Č°╩ŪŠ½║åŻ¼╩ŪĖ∙ō■(j©┤)ė├æ¶ŪķørŻ¼īóė├æ¶╩╣ė├Ą─╦┼Ę■╣”─▄ėĶęįÅŖ╗»Ż¼╩╣ų«īŻČ°Š½Ż¼Č°īó▓╗╩╣ė├Ą─ę╗ą®╣”─▄ėĶęįŠ½║åŻ¼Å─Č°ĮĄĄ═┴╦╦┼Ę■ŽĄĮy(t©»ng)│╔▒ŠŻ¼×ķ┐═æ¶äō(chu©żng)įņĖ³ČÓĄ─╩šęµĪŻÖCŲ„╚╦Ą─╣żū„▒Ē¼F(xi©żn)╩▄╦┼Ę■ŽĄĮy(t©»ng)ė░ĒæśO┤¾Ż¼ę“Č°Š½├▄╦┼Ę■ŽĄĮy(t©»ng)Ą─ĻPµIąį─▄ųĖś╦ė└▀hČ╝╩ŪŽ╚▀Mąį▒╚▌^Ą─╩ūę¬ę“╦žĪŻć°═ŌŽ╚▀M╦┼Ę■ŽĄĮy(t©»ng)ęčĮø(j©®ng)─▄ē“║▄║├Ąž▀mæ¬Į^┤¾ČÓöĄ(sh©┤)æ¬ė├Ą─ąĶŪ¾Ż¼Ųõčą░l(f©Ī)┘Yį┤╝»ųąį┌éĆäeĖ▀Č╦æ¬ė├╝░š¹¾wąį─▄╠ß╔²ĘĮ├µŻ¼╠Äė┌Š½Ą±╝Ü┐╠ļAČ╬ĪŻį┌╣żśI(y©©)4.0Ą─┤¾▒│Š░Ž┬Ż¼ć°«a(ch©Żn)╦┼Ę■╚╬ųžČ°Ą└▀hŻ¼▀ĆąĶ┼¼┴”ūĘ┌sĪŻ
- END -
▒Š╬─ŽĄŠW(w©Żng)Įj▐D▌dŻ¼░µÖÓÜwįŁū„š▀╦∙ėąĪŻĄ½ę“▐D▌d▒ŖČÓŻ¼¤oĘ©┤_šJšµš²įŁ╩╝ū„š▀Ż¼╣╩āH╬┤ś╦├„▐D▌düĒį┤ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū