
ę╗Īó ų▒┴„ļŖÖC“īäėļŖ┬ĘĄ─įOėŗ─┐ś╦
į┌ų▒┴„ļŖÖC“īäėļŖ┬ĘĄ─įOėŗųąŻ¼ų„ę¬┐╝æ]ę╗Ž┬Äū³cŻ║
- ╣”─▄Ż║ļŖÖC╩Ūå╬Ž“▀Ć╩ŪļpŽ“▐DäėŻ┐ąĶ▓╗ąĶ꬚{╦┘Ż┐ī”ė┌å╬Ž“Ą─ļŖÖC“īäėŻ¼ų╗ę¬ė├ę╗éĆ┤¾╣”┬╩╚²śO╣▄╗“ł÷ą¦æ¬╣▄╗“└^ļŖŲ„ų▒ĮėĦäėļŖÖC╝┤┐╔Ż¼«öļŖÖCąĶę¬ļpŽ“▐DäėĢrŻ¼┐╔ęį╩╣ė├ė╔4éĆ╣”┬╩į¬╝■ĮM│╔Ą─Hś“ļŖ┬Ę╗“š▀╩╣ė├ę╗éĆļpĄČļpöSĄ─└^ļŖŲ„ĪŻ╚ń╣¹▓╗ąĶ꬚{╦┘Ż¼ų╗ę¬╩╣ė├└^ļŖŲ„╝┤┐╔Ż╗Ą½╚ń╣¹ąĶ꬚{╦┘Ż¼┐╔ęį╩╣ė├╚²śO╣▄Ż¼ł÷ą¦æ¬╣▄Ą╚ķ_ĻPį¬╝■īŹ¼FPWMŻ©├}ø_īÆČ╚š{ųŲŻ®š{╦┘ĪŻ
- ąį─▄Ż║ī”ė┌PWMš{╦┘Ą─ļŖÖC“īäėļŖ┬ĘŻ¼ų„ę¬ėąęįŽ┬ąį─▄ųĖś╦ĪŻ
1Ż®▌ö│÷ļŖ┴„║═ļŖē║ĘČć·Ż¼╦³øQČ©ų°ļŖ┬Ę─▄“īäėČÓ┤¾╣”┬╩Ą─ļŖÖCĪŻ
2Ż®ą¦┬╩Ż¼Ė▀Ą─ą¦┬╩▓╗āHęŌ╬Čų°╣Ø╩ĪļŖį┤Ż¼ę▓Ģ■£p╔┘“īäėļŖ┬ĘĄ─░l¤ßĪŻę¬╠ßĖ▀ļŖ┬ĘĄ─ą¦┬╩Ż¼┐╔ęįÅ─▒ŻūC╣”┬╩Ų„╝■Ą─ķ_ĻP╣żū„ĀŅæB║═Ę└ų╣╣▓æBī¦═©Ż©Hś“╗“═Ų═ņļŖ┬Ę┐╔─▄│÷¼FĄ─ę╗éĆå¢Ņ}Ż¼╝┤ā╔éĆ╣”┬╩Ų„╝■═¼Ģrī¦═©╩╣ļŖį┤Č╠┬ĘŻ®╚ļ╩ųĪŻ
3Ż®ī”┐žųŲ▌ö╚ļČ╦Ą─ė░ĒæĪŻ╣”┬╩ļŖ┬Ęī”Ųõ▌ö╚ļČ╦æ¬ėą┴╝║├Ą─ą┼╠¢Ė¶ļxŻ¼Ę└ų╣ėąĖ▀ļŖē║┤¾ļŖ┴„▀M╚ļų„┐žļŖ┬ĘŻ¼▀@┐╔ęįė├Ė▀Ą─▌ö╚ļūĶ┐╣╗“š▀╣ŌļŖ±Ņ║ŽŲ„īŹ¼FĖ¶ļxĪŻ
4Ż®ī”ļŖį┤Ą─ė░ĒæĪŻ╣▓æBī¦═©┐╔ęįę²ŲļŖį┤ļŖē║Ą─╦▓ķgŽ┬ĮĄįņ│╔Ė▀ŅlļŖį┤╬█╚ŠŻ╗┤¾Ą─ļŖ┴„┐╔─▄ī¦ų┬ĄžŠĆļŖ╬╗ĖĪäėĪŻ
5Ż®┐╔┐┐ąįĪŻļŖÖC“īäėļŖ┬Ęæ¬įō▒M┐╔─▄ū÷ĄĮŻ¼¤ošō╝ė╔Ž║╬ĘN┐žųŲą┼╠¢Ż¼║╬ĘN¤oį┤žō▌dŻ¼ļŖ┬ĘČ╝╩Ū░▓╚½Ą─ĪŻ
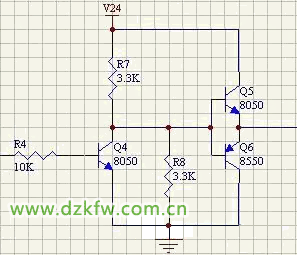
Č■Īó ╚²śO╣▄-ļŖūĶū„¢┼śO“īäė
1Ż«▌ö╚ļ┼cļŖŲĮ▐DōQ▓┐ĘųŻ║
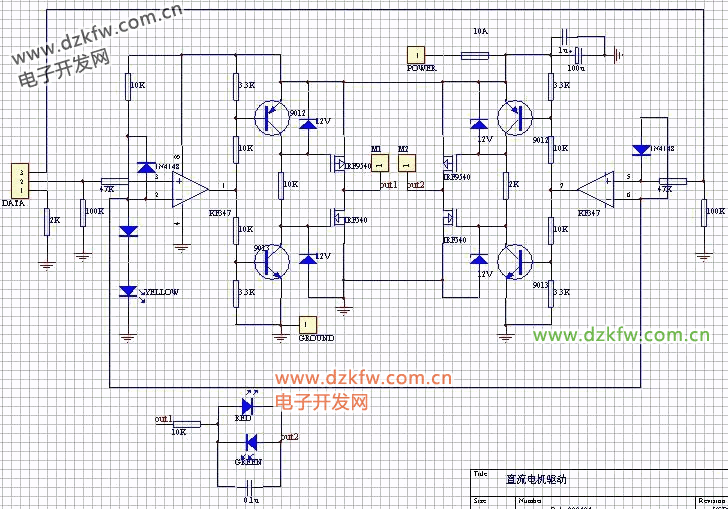
▌ö╚ļą┼╠¢ŠĆė╔DATAę²╚ļŻ¼1─_╩ŪĄžŠĆŻ¼ŲõėÓ╩Ūą┼╠¢ŠĆĪŻūóęŌ1─_ī”Ąž▀BĮė┴╦ę╗éĆ2KÜWĄ─ļŖūĶĪŻ«ö“īäė░Õ┼cå╬Ų¼ÖCĘųäe╣®ļŖĢrŻ¼▀@éĆļŖūĶ┐╔ęį╠ß╣®ą┼╠¢ļŖ┴„╗ž┴„Ą─═©┬ĘĪŻ«ö“īäė░Õ┼cå╬Ų¼ÖC╣▓ė├ę╗ĮMļŖį┤ĢrŻ¼▀@éĆļŖūĶ┐╔ęįĘ└ų╣┤¾ļŖ┴„čžų°▀BŠĆ┴„╚ļå╬Ų¼ÖCų„░ÕĄ─ĄžŠĆįņ│╔Ė╔ö_ĪŻ╗“š▀šfŻ¼ŽÓ«öė┌░č“īäė░ÕĄ─ĄžŠĆ┼cå╬Ų¼ÖCĄ─ĄžŠĆĖ¶ķ_Ż¼īŹ¼FĪ░ę╗³cĮėĄžĪ▒ĪŻ
Ė▀╦┘▀\Ę┼KF347Ż©ę▓┐╔ęįė├TL084Ż®Ą─ū„ė├╩Ū▒╚▌^Ų„Ż¼░č▌ö╚ļ▀ē▌ŗą┼╠¢═¼üĒūįųĖ╩Š¤¶║═ę╗éĆČ■śO╣▄Ą─2.7V╗∙£╩ļŖē║▒╚▌^Ż¼▐DōQ│╔ĮėĮ³╣”┬╩ļŖį┤ļŖē║Ę∙Č╚Ą─ĘĮ▓©ą┼╠¢ĪŻKF347Ą─▌ö╚ļļŖē║ĘČć·▓╗─▄ĮėĮ³žōļŖį┤ļŖē║Ż¼Ę±ätĢ■│÷ÕeĪŻę“┤╦į┌▀\Ę┼▌ö╚ļČ╦į÷╝ė┴╦Ę└ų╣ļŖē║ĘČć·ęń│÷Ą─Č■śO╣▄ĪŻ▌ö╚ļČ╦Ą─ā╔éĆļŖūĶę╗éĆė├üĒŽ▐┴„Ż¼ę╗éĆė├üĒį┌▌ö╚ļæę┐šĢr░č▌ö╚ļČ╦└ŁĄĮĄ═ļŖŲĮĪŻ
▓╗─▄ė├LM339╗“Ųõ╦¹╚╬║╬ķ_┬Ę▌ö│÷Ą─▒╚▌^Ų„┤·╠µ▀\Ę┼Ż¼ę“×ķķ_┬Ę▌ö│÷Ą─Ė▀ļŖŲĮĀŅæB▌ö│÷ūĶ┐╣į┌1Ū¦ÜWęį╔ŽŻ¼ē║ĮĄ▌^┤¾Ż¼║¾├µę╗╝ēĄ─╚²śO╣▄īó¤oĘ©Įžų╣ĪŻ
2Ż«¢┼śO“īäė▓┐ĘųŻ║
║¾├µ╚²śO╣▄║═ļŖūĶŻ¼ĘĆē║╣▄ĮM│╔Ą─ļŖ┬Ę▀Mę╗▓ĮĘ┼┤¾ą┼╠¢Ż¼“īäėł÷ą¦æ¬╣▄Ą─¢┼śO▓ó└¹ė├ł÷ą¦æ¬╣▄▒Š╔ĒĄ─¢┼śOļŖ╚▌Ż©┤¾╝s1000pFŻ®▀MąąčėĢrŻ¼Ę└ų╣Hś“╔ŽŽ┬ā╔▒█Ą─ł÷ą¦æ¬╣▄═¼Ģrī¦═©Ż©Ī░╣▓æBī¦═©Ī▒Ż®įņ│╔ļŖį┤Č╠┬ĘĪŻ
«ö▀\Ę┼▌ö│÷Č╦×ķĄ═ļŖŲĮŻ©╝s×ķ1Vų┴2V,▓╗─▄═Ļ╚½▀_ĄĮ┴ŃŻ®ĢrŻ¼Ž┬├µĄ─╚²śO╣▄Įžų╣Ż¼ł÷ą¦æ¬╣▄ī¦═©ĪŻ╔Ž├µĄ─╚²śO╣▄ī¦═©Ż¼ł÷ą¦æ¬╣▄Įžų╣,▌ö│÷×ķĖ▀ļŖŲĮĪŻ«ö▀\Ę┼▌ö│÷Č╦×ķĖ▀ļŖŲĮŻ©╝s×ķVCC-(1Vų┴2V),▓╗─▄═Ļ╚½▀_ĄĮVCCŻ®ĢrŻ¼Ž┬├µĄ─╚²śO╣▄ī¦═©Ż¼ł÷ą¦æ¬╣▄Įžų╣ĪŻ╔Ž├µĄ─╚²śO╣▄Įžų╣Ż¼ł÷ą¦æ¬╣▄ī¦═©,▌ö│÷×ķĄ═ļŖŲĮĪŻ
╔Ž├µĄ─Ęų╬÷╩ŪņoæBĄ─Ż¼Ž┬├µėæšōķ_ĻP▐DōQĄ─äėæB▀^│╠Ż║╚²śO╣▄ī¦═©ļŖūĶ▀hąĪė┌2Ū¦ÜWŻ¼ę“┤╦╚²śO╣▄ė╔Įžų╣▐DōQĄĮī¦═©Ģrł÷ą¦æ¬╣▄¢┼śOļŖ╚▌╔ŽĄ─ļŖ║╔┐╔ęįčĖ╦┘ßīĘ┼Ż¼ł÷ą¦æ¬╣▄čĖ╦┘Įžų╣ĪŻĄ½╩Ū╚²śO╣▄ė╔ī¦═©▐DōQĄĮĮžų╣Ģrł÷ą¦æ¬╣▄¢┼śO═©▀^2Ū¦ÜWļŖūĶ│õļŖģsąĶę¬ę╗Č©Ą─ĢrķgĪŻŽÓæ¬Ą─Ż¼ł÷ą¦æ¬╣▄ė╔ī¦═©▐DōQĄĮĮžų╣Ą─╦┘Č╚ę¬▒╚ė╔Įžų╣▐DōQĄĮī¦═©Ą─╦┘Č╚┐ņĪŻ╝┘╚ńā╔éĆ╚²śO╣▄Ą─ķ_ĻPäėū„╩Ū═¼Ģr░l╔·Ą─Ż¼▀@éĆļŖ┬Ę┐╔ęįūī╔ŽŽ┬ā╔▒█Ą─ł÷ą¦æ¬╣▄Ž╚öÓ║¾═©Ż¼Ž¹│²╣▓æBī¦═©¼FŽ¾ĪŻ
īŹļH╔ŽŻ¼▀\Ę┼▌ö│÷ļŖē║ūā╗»ąĶę¬ę╗Č©Ą─ĢrķgŻ¼▀@Č╬Ģrķgā╚▀\Ę┼▌ö│÷ļŖē║╠Äė┌š²žōļŖį┤ļŖē║ų«ķgĄ─ųąķgųĄĪŻ▀@Ģrā╔éĆ╚²śO╣▄═¼Ģrī¦═©Ż¼ł÷ą¦æ¬╣▄Š══¼ĢrĮžų╣┴╦ĪŻ╦∙ęįīŹļHĄ─ļŖ┬Ę▒╚▀@ĘN└ĒŽļŪķør▀Ćę¬░▓╚½ę╗ą®ĪŻ
ł÷ą¦æ¬╣▄¢┼śOĄ─12VĘĆē║Č■śO╣▄ė├ė┌Ę└ų╣ł÷ą¦æ¬╣▄¢┼śO▀^ē║ō¶┤®ĪŻę╗░ŃĄ─ł÷ą¦æ¬╣▄¢┼śOĄ──═ē║╩Ū18V╗“20VŻ¼ų▒Įė╝ė╔Ž24VļŖē║īóĢ■ō¶┤®Ż¼ę“┤╦▀@éĆĘĆē║Č■śO╣▄▓╗─▄ė├Ųš═©Ą─Č■śO╣▄┤·╠µŻ¼Ą½╩Ū┐╔ęįė├2Ū¦ÜWĄ─ļŖūĶ┤·╠µŻ¼═¼śė─▄Ą├ĄĮ12VĄ─Ęųē║ĪŻ
3Ż«ł÷ą¦æ¬╣▄▌ö│÷▓┐ĘųŻ║
┤¾╣”┬╩ł÷ą¦æ¬╣▄ā╚▓┐į┌į┤śO║═┬®śOų«ķgĘ┤Ž“▓ó┬ōėąČ■śO╣▄Ż¼Įė│╔Hś“╩╣ė├ĢrŻ¼ŽÓ«öė┌▌ö│÷Č╦ęčĮø▓ó┬ō┴╦Ž¹│²ļŖē║╝ŌĘÕė├Ą─╦─éĆČ■śO╣▄Ż¼ę“┤╦▀@└’Š═ø]ėą═ŌĮėČ■śO╣▄ĪŻ▌ö│÷Č╦▓ó┬ōę╗éĆąĪļŖ╚▌(out1║═out2ų«ķg)ī”ĮĄĄ═ļŖÖC«a╔·Ą─╝ŌĘÕļŖē║ėąę╗Č©Ą─║├╠ÄŻ¼Ą½╩Ūį┌╩╣ė├PWMĢrėą«a╔·╝ŌĘÕļŖ┴„Ą─Ė▒ū„ė├Ż¼ę“┤╦╚▌┴┐▓╗ę╦▀^┤¾ĪŻį┌╩╣ė├ąĪ╣”┬╩ļŖÖCĢr▀@éĆļŖ╚▌┐╔ęį┬į╚źĪŻ╚ń╣¹╝ė▀@éĆļŖ╚▌Ą─įÆŻ¼ę╗Č©ę¬ė├Ė▀─═ē║Ą─Ż¼Ųš═©Ą─┤╔Ų¼ļŖ╚▌┐╔─▄Ģ■│÷¼Fō¶┤®Č╠┬ĘĄ─╣╩šŽĪŻ
▌ö│÷Č╦▓ó┬ōĄ─ė╔ļŖūĶ║═░l╣ŌČ■śO╣▄,ļŖ╚▌ĮM│╔Ą─ļŖ┬ĘųĖ╩ŠļŖÖCĄ─▐DäėĘĮŽ“.
4Ż«ąį─▄ųĖś╦Ż║
ļŖį┤ļŖē║15~30 V,ūŅ┤¾│ų└m▌ö│÷ļŖ┴„5A/├┐éĆļŖÖCŻ¼Č╠ĢrķgŻ©10├ļŻ®┐╔ęį▀_ĄĮ10A,PWMŅl┬╩ūŅĖ▀┐╔ęįė├ĄĮ30KHz(ę╗░Ńė├1ĄĮ10KHz)ĪŻļŖ┬Ę░Õ░³║¼4éĆ▀ē▌ŗ╔Ž¬Ü┴óĄ─Ż¼▌ö│÷Č╦ā╔ā╔Įė│╔Hś“Ą─╣”┬╩Ę┼┤¾å╬į¬Ż¼┐╔ęįų▒Įėė├å╬Ų¼ÖC┐žųŲĪŻīŹ¼FļŖÖCĄ─ļpŽ“▐Däė║═š{╦┘ĪŻ
5Ż«▓╝ŠĆŻ║
┤¾ļŖ┴„ŠĆ┬Ęę¬▒M┴┐Ą─Č╠┤ųŻ¼▓óŪę▒M┴┐▒▄├ŌĮø▀^▀^┐ūŻ¼ę╗Č©ę¬Įø▀^▀^┐ūĄ─įÆę¬░č▀^┐ūū÷┤¾ę╗ą®Ż©>1mmŻ®▓óŪęį┌║Ė▒P╔Žū÷ę╗╚”ąĪĄ─▀^┐ūŻ¼į┌║ĖĮėĢrė├║ĖÕa╠ŅØMŻ¼Ę±ät┐╔─▄Ģ■¤²öÓĪŻ┴Ē═ŌŻ¼╚ń╣¹╩╣ė├┴╦ĘĆē║╣▄Ż¼ł÷ą¦æ¬╣▄į┤śOī”ļŖį┤║═ĄžĄ─ī¦ŠĆę¬▒M┐╔─▄Ą─Č╠┤ųŻ¼Ę±ätį┌┤¾ļŖ┴„ĢrŻ¼▀@Č╬ī¦ŠĆ╔ŽĄ─ē║ĮĄ┐╔─▄Ģ■Įø▀^š²Ų½Ą─ĘĆē║╣▄║═ī¦═©Ą─╚²śO╣▄īóŲõ¤²Ü¦ĪŻį┌ę╗ķ_╩╝Ą─įOėŗųąŻ¼NMOS╣▄Ą─į┤śOė┌Ąžų«ķgį°ĮøĮė╚ļę╗éĆ0.15ÜWĄ─ļŖūĶė├üĒÖz£yļŖ┴„Ż¼▀@éĆļŖūĶŠ═│╔┴╦▓╗öÓ¤²Ü¦░ÕūėĄ─ū’┐²Ą£╩ūĪŻ«ö╚╗╚ń╣¹░čĘĆē║╣▄ōQ│╔ļŖūĶŠ═▓╗┤µį┌▀@éĆå¢Ņ}┴╦ĪŻ
į┌2004─ĻĄ─Robocon▒╚┘ÉųąŻ¼╬ęéāų„ę¬▓╔ė├┴╦▀@éĆļŖ┬Ęė├ęįļŖÖC“īäėĪŻ
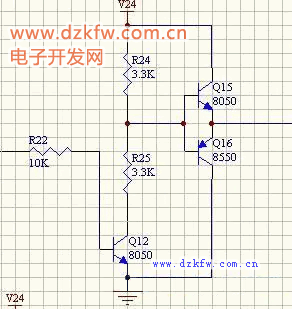
╚²Īó Ą═ē║“īäėļŖ┬ĘĄ─║åęū¢┼śO“īäė
ę╗░Ń╣”┬╩ł÷ą¦æ¬╣▄Ą─ūŅĖ▀¢┼į┤ļŖē║×ķ20Vū¾ėęŻ¼╦∙ęįį┌24Væ¬ė├ųąę¬▒ŻūC¢┼į┤ļŖē║▓╗─▄│¼▀^20VŻ¼į÷╝ė┴╦ļŖ┬ĘĄ─Å═ļs│╠Č╚ĪŻĄ½į┌12V╗“Ė³Ą═ļŖē║Ą─æ¬ė├ųąŻ¼ļŖ┬ĘŠ═┐╔ęį┤¾┤¾║å╗»ĪŻ
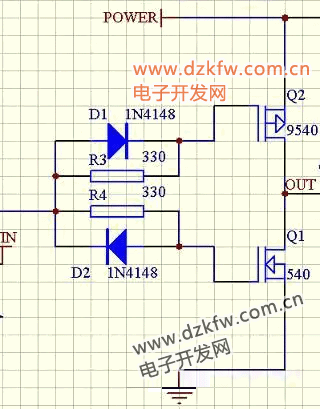
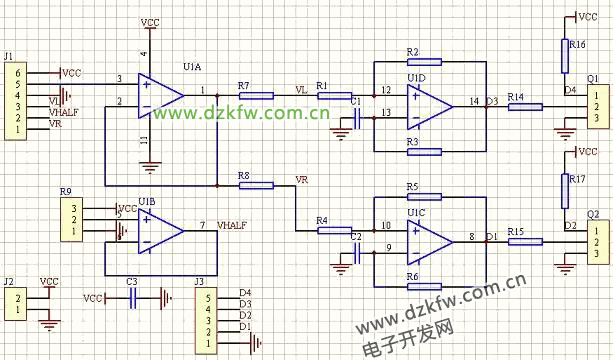
ū¾łDŠ═╩Ūę╗éĆ12V“īäėś“Ą─ę╗▀ģŻ¼╔Ž├µļŖ┬ĘĄ─╚²śO╣▄▓┐Ęų▒╗ā╔éĆČ■śO╣▄║═ā╔éĆļŖūĶ┤·╠µĪŻŻ©ūóęŌŻ¼Ė·╔ŽłD▀ē▌ŗ╩ŪĘ┤Ą─Ż®ė╔ė┌ł÷ą¦æ¬╣▄¢┼śOļŖ╚▌Ą─┤µį┌Ż¼═©▀^R3Ż¼R4Ž“¢┼śOļŖ╚▌│õļŖ╩╣ł÷ą¦æ¬╣▄čėŠÅī¦═©Ż╗Č°═©▀^Č■śO╣▄ų▒Įėīó¢┼śOļŖ╚▌Ę┼ļŖ╩╣ł÷ą¦æ¬╣▄┴ó╝┤Įžų╣Ż¼Å─Č°▒▄├Ō┴╦╣▓æBī¦═©ĪŻ
▀@éĆļŖ┬Ęę¬Ū¾į┌INČ╦▌ö╚ļĄ─╩Ū▀ģŠēČĖŪ═Ą─ĘĮ▓©├}ø_Ż¼ę“┤╦┐žųŲą┼╠¢Å─å╬Ų¼ÖC╗“š▀Ųõ╦¹ķ_┬Ę▌ö│÷Ą─įOéõĮė╚ļ║¾Ż¼ę¬Įø▀^╩®├▄╠žė|░lŲ„Ż©▒╚╚ń555Ż®╗“š▀═Ų═ņ▌ö│÷Ą─Ė▀╦┘▒╚▌^Ų„▓┼─▄ĮėĄĮINČ╦ĪŻ╚ń╣¹▌ö╚ļ▀ģŠē▀^ŠÅŻ¼Č■śO╣▄čėĢrļŖ┬Ęę▓Š═╩¦╚ź┴╦ū„ė├ĪŻ
R3Ż¼R4Ą─▀x╚Ī┼cINą┼╠¢▀ģčž╔²ĮĄ╦┘Č╚ėąĻPŻ¼ą┼╠¢▀ģŠēįĮČĖŪ═Ż¼R3Ż¼R4┐╔ęį▀xĄ─įĮąĪŻ¼ķ_ĻP╦┘Č╚ę▓Š═┐╔ęįū÷Ą─įĮ┐ņĪŻRobocon▒╚┘É╩╣ė├Ą─╔²ē║ļŖ┬ĘŻ©įŁ└ĒŽÓ╦ŲŻ®ųąŻ¼INŪ░ė├Ą─╩Ū555ĪŻ
╦─Īó ▀ģčžčėĢr“īäėļŖ┬Ę
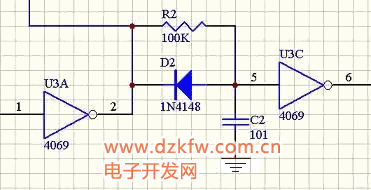
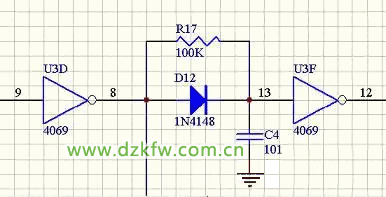
į┌Ū░╝ē▀ē▌ŗļŖ┬Ę└’Ż¼ėąęŌĄžī”┐žųŲPMOSĄ─Ž┬ĮĄčž║═┐žųŲNMOSĄ─╔Ž╔²čž▀MąąčėĢrŻ¼į┘š¹ą╬│╔ĘĮ▓©Ż¼ę▓┐╔ęį▒▄├Ōł÷ą¦æ¬╣▄Ą─╣▓æBī¦═©ĪŻ┴Ē═ŌŻ¼▀@śėū÷┐╔ęį╩╣║¾╝ēĄ─¢┼śO“īäėļŖ┬Ę║å╗»Ż¼┐╔ęį╩ŪĄ═ūĶ═Ų═ņ“īäė¢┼śOŻ¼▓╗▒ž┐╝æ]¢┼śOļŖ╚▌Ż¼┐╔ęį▌^║├Ą─▀mæ¬▓╗═¼Ą─ł÷ą¦æ¬╣▄ĪŻ2003─ĻRobocon▒╚┘É▓╔ė├Ą─Š═╩Ū▀@ĘN“īäėļŖ┬ĘĪŻŽ┬łD╩Ūā╔ĘN▀ģ螥─čėĢrļŖ┬ĘŻ║
Ž┬łD╩Ūī”æ¬Ą─NMOSŻ¼PMOS¢┼śO“īäėļŖ┬ĘŻ║
▀@éĆ¢┼śO“īäėļŖ┬Ęė╔ā╔╝ē╚²śO╣▄ĮM│╔Ż║Ū░╝ē╠ß╣®“īäėł÷ą¦æ¬╣▄¢┼śO╦∙ąĶĄ─š²┤_ļŖē║Ż¼║¾╝ē╩Ūę╗╝ē╔õśOĖ·ļSŲ„Ż¼ĮĄĄ═▌ö│÷ūĶ┐╣Ż¼Ž¹│²¢┼śOļŖ╚▌Ą─ė░ĒæĪŻ×ķ┴╦▒ŻūC▓╗╣▓æBī¦═©Ż¼▌ö╚ļĄ─▀ģčžę¬▒╚▌^ČĖŻ¼╔Ž╩÷Ž╚čėĢrį┘š¹ą╬Ą─ļŖ┬ĘŠ═┐╔ęįū÷ĄĮ
╬ÕĪó Ųõ╦³ÄūĘN“īäėļŖ┬Ę
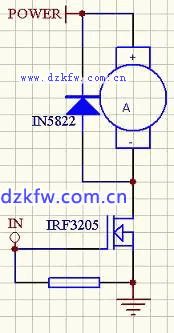
1Ż« └^ļŖŲ„Ż½░ļī¦¾w╣”┬╩Ų„╝■Ą─ŽļĘ©
└^ļŖŲ„ėąų°ļŖ┴„┤¾Ż¼╣żū„ĘĆČ©Ą─ā׳cŻ¼┐╔ęį┤¾┤¾║å╗»“īäėļŖ┬ĘĄ─įOėŗĪŻį┌ąĶę¬īŹ¼Fš{╦┘Ą─ļŖÖC“īäėļŖ┬ĘųąŻ¼ę▓┐╔ęį│õĘų└¹ė├└^ļŖŲ„ĪŻėąę╗éĆĘĮ░ĖŠ═╩Ū└¹ė├└^ļŖŲ„üĒ┐žųŲļŖ┴„ĘĮŽ“üĒĖ─ūāļŖÖC▐DŽ“Ż¼Č°ė├å╬éĆĄ─╠ž┤¾ļŖ┴„ł÷ą¦æ¬╣▄Ż©▒╚╚ńIRF3205Ż¼ę╗░Ńų╗ėąNą═╠ž┤¾ļŖ┴„Ą─╣▄ūėŻ®üĒīŹ¼FPWMš{╦┘,╚ńŽ┬ėęłD╦∙╩ŠĪŻ▀@śė╩ŪīŹ¼F╠žäe┤¾ļŖ┴„“īäėĄ─ę╗éĆĘĮĘ©ĪŻōQŽ“Ą─└^ļŖŲ„ę¬╩╣ė├ļpĄČļpöSą═Ą─Ż¼ĮėŠĆ╚ńŽ┬ū¾łD,ŠĆ╚”ĮėŠĆ╚ńŽ┬ųąłDŻ║
2Ż« ÄūĘN“īäėąŠŲ¼
1Ż® L298 ģó┐╝
╔ŽłD×ķę╗éĆ╩╣ė├ė╬æ“╩ų▒·╗“š▀║Į─ŻōuŚU╔ŽĄ─ŠĆąįļŖ╬╗Ų„Ż©╗“ŠĆąį╗¶Ā¢į¬╝■Ż®┐žųŲā╔éĆĄū▒P“īäėļŖÖCĄ─PWM╔·│╔ļŖ┬ĘĪŻJ1╩Ū╩ų▒·Ą─▓Õū∙Ż¼123║═456Ęųäe╩ŪxŻ¼yā╔éĆĘĮŽ“Ą─ļŖ╬╗Ų„ĪŻU1B╠ß╣®░ļļŖį┤ļŖē║Ż¼U1A╩ŪļŖē║Ė·ļSĪŻxŻ¼yĘų┴┐Įø▀^║Ž│╔│╔×ķ┐žųŲū¾ėę▌åā╔éĆļŖÖC▐D╦┘Ą─ļŖē║ą┼╠¢ĪŻį┌╩╣ė├ųąŻ¼ūīL=(x+1)y/(x+1.4)Ż¼R=(x-1)y/(x-0.6)Ż¼Įø▀^įć“×ėą▓╗ÕeĄ─ą¦╣¹Ż©öĄūųų╗╩Ūå╬╬╗Ż¼▓╗╩ŪļŖē║ųĄŻ®ĪŻĮø▀^U1C║═U1DĮM│╔Ą─╩®├▄╠žš±╩ÄŲ„░čļŖē║▐DōQ×ķŽÓæ¬Ą─PWMą┼╠¢Ż¼ė├üĒ┐žųŲ╣”┬╩“īäėļŖ┬ĘĪŻęįU1D×ķ└²Ż¼R1Ż¼R2ĮM│╔ėą╗ž▓ŅĄ─╩®├▄╠žļŖ┬ĘŻ¼╔ŽŽ┬ķTŽ▐╩▄▌ö╚ļļŖē║ė░ĒæŻ¼C1║═R3ĮM│╔čėĢr╗ž┬ĘŻ¼╚ń┤╦ą╬│╔š±╩ÄĄ─├}īÆ╩▄▌ö╚ļļŖē║┐žųŲĪŻQ1Ż¼Q2╩Ū╚²śO╣▄Ż¼ĮM│╔Ę┤ŽÓŲ„Ż¼╠ß╣®▓ŅĘųĄ─┐žųŲą┼╠¢ĪŻŠ▀¾wš±╩Ä▀^│╠ģóęŖī”555š±╩ÄŲ„Ą─Ęų╬÷ĪŻ
Ų▀Īó ▓Į▀MļŖÖC“īäė
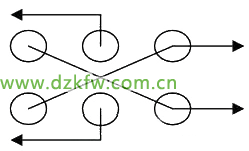
1. ąĪ╣”┬╩4ŽÓ▓Į▀MļŖÖCĄ─“īäė
Ž┬├µ╩Ūę╗ĘN“īäėļŖ┬Ę┐“łD:
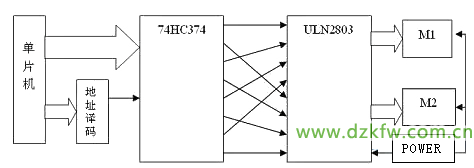
▀_┴ųŅD╣▄Ļć┴ąULN2803ĘųäeÅ─µi┤µŲ„╚Ī│÷Ą┌0,2,4,6╬╗║═1,3,5,7╬╗╚ź“īäėā╔éĆ▓Į▀MļŖÖC.╦─ŽÓ▓Į▀MļŖÖCĄ─═©ļŖĒśą“┐╔ęįėąÄūĘN:A,B,C,D(4ŽÓ4┼─);AB,BC,CD,DA(4ŽÓļp4┼─);A,AB,B,BC,C,CD,D,DA(4ŽÓ8┼─).×ķ┴╦╝µŅÖĘĆČ©ąį,▐DŠž║═╣”║─,ę╗░Ń▓╔ė├4ŽÓ8┼─ĘĮ╩Į.╦∙ėą▀@ą®ĘĮ╩ĮČ╝┐╔ęį═©▀^裣hęŲ╬╗īŹ¼F(ę▓ę¬ėąČ©Ų┌▒O┐ž),×ķ┴╦╩╣4ŽÓ8┼─╚▌ęūīŹ¼F,µi┤µŲ„┼c“īäė▓┐Ęų▓╔ė├┴╦Į╗▓µ▀BĮė.
▓Į▀MļŖÖC╣żū„į┌╦─ŽÓ░╦┼──Ż╩ĮŻ©╝┤š²▐DĄ─▌ö╚ļą┼╠¢×ķ1000Ī·1100Ī·0100Ī·0110Ī·0010Ī·0011Ī·0001Ī·1001Ī·1000Ż®Ż¼ī”æ¬├┐éĆ▓Į▀MļŖÖCę¬ėą╦─éĆą┼╠¢▌ö╚ļČ╦Ż¼└Ēšō╔ŽŽ“Č╦┐┌▌ö│÷ą┼╠¢┐╔ęį┐žųŲā╔éĆ▓Į▀MļŖÖCĄ─╣żū„ĪŻ╝─┤µŲ„裣hęŲ╬╗Ųµ┼╝╬╗Ęųäeū„ā╔éĆ▓Į▀MļŖÖCĄ─“īäėČ╦Ą─ū÷Ę©Ż¼Ųõ╦╝Žļ╚ńŽ┬Ż║
LOOP: MOV A,#1110000B ;į┌A╝─┤µŲ„ųąų├╚ļ11100000
RR A ;ėęęŲ╬╗
AJMP LOOP ;裣hėęęŲ╬╗
▀@śėį┌╝─┤µŲ„Aųą┤µā”Ą─ųĄĢ■ėą╚ńŽ┬裣h11100000Ī·01110000Ī·00111000Ī·00011100Ī·00001110Ī·00000111Ī·10000011Ī·11000001Ī·11100000,ŲõŲµöĄ╬╗ėą╚ńŽ┬裣h1000Ī·1100Ī·0100Ī·0110Ī·0010Ī·0011Ī·0001Ī·1001Ī·1000,Ųõ┼╝öĄ╬╗ėą╚ńŽ┬裣h1100Ī·0100Ī·0110Ī·0010Ī·0011Ī·0001Ī·1001Ī·1000Ī·1100.īóA▌ö│÷ĄĮP0Č╦┐┌Ż¼ätŲµöĄ╬╗║═┼╝öĄ╬╗š²╩Ū╬ęéā╦∙ąĶꬥ─▓Į▀MļŖÖC▌ö╚ļą┼╠¢ĪŻ
Č°╩┬īŹ╔Ž├┐éĆļŖÖCĄ─äėū„╩Ū▓╗═¼Ą─,×ķ┤╦╬ęéāį┌RAMųą×ķ├┐éĆļŖÖCķ_▒┘ę╗éĆbyteĄ─ĀŅæBūų╣Øė├ęį裣hęŲ╬╗.į┌├┐ę╗éĆļŖÖCų▄Ų┌└’,Ė∙ō■ąĶę¬ī”├┐éĆļŖÖCĄ─byte▀MąąęŲ╬╗,▓óė├ANLųĖ┴Ņīóā╔éĆļŖÖCĄ─ĀŅæB║Ž│╔ĄĮę╗éĆūų╣Ø└’▌ö│÷┤╦ĢrĄ─A═¼Ģr┐╔ęį┐žųŲā╔éĆļŖÖC┴╦
▓Į▀MļŖÖCĄ─╦┘Č╚ė╔“īäė├}ø_Ą─Ņl┬╩øQČ©,ęŲ╬╗Ą─ų▄Ų┌▓╗═¼,ļŖÖCĄ─╦┘Č╚ę▓Š═▓╗═¼┴╦.Ū░├µ╠ߥĮĄ─ļŖÖCų▄Ų┌,æ¬įō╚ĪĖ„ĘN┐╔─▄Ą─ų▄Ų┌Ą─ūŅ┤¾╣½╝söĄ.ōQŠõįÆšf,ę╗Ą®ļŖÖCų▄Ų┌╚ĪČ©,├┐éĆļŖÖCęŲ╬╗Ą─ų▄Ų┌æ¬įō╩Ū╦³Ą─▒ČöĄ.į┌│╠ą“ųą,ī”├┐éĆļŖÖCĄ─ŽÓæ¬Ģr┐╠įOČ©ŽÓæ¬Ą─ĘųŅl▒╚ųĄ,═¼Ģrė├ę╗éĆūā┴┐▀Mąą╝ėę╗ėŗöĄ:├┐ĄĮę╗éĆļŖÖCų▄Ų┌╚¶ėŗöĄūā┴┐<ĘųŅl▒╚ųĄ,ätėŗöĄūā┴┐╝ė1;╚¶ŽÓĄ╚,ätęŲ╬╗,ėŗöĄūā┴┐ŪÕ┴Ń.▀@śėŠ═īŹ¼F┴╦ĘųŅlš{╦┘,┐╔ęįūīČÓéĆļŖÖC═¼Ģręį▓╗═¼Ą─╦┘Č╚▀\▐D.
┴Ē═Ō,ę▓┐╔ęį▓╔ė├é„ĮyĄ─▓ķ▒ĒĘĮ╩Į▀Mąą“īäė,│╠ą“╔įķL,Ą½ę▓▒╚▌^ĘĆČ©Ż¼▀@ĘNĘĮĘ©ĘŪ│Ż▀m║Ž╚²ŽÓ▓Į▀MļŖÖCĪŻ
UCN5804B/LB╩ŪAllegro╣½╦Š╔·«aĄ─4ŽÓ▓Į▀MļŖÖC“īäėīŻė├ąŠŲ¼,╦³╝»│╔┴╦┐žųŲ▀ē▌ŗ,├}ø_Ęų┼õ║═╣”┬╩═Ųäė,═©▀^ÄūéĆ╣▄─_Ą─ļŖŲĮüĒįOČ©▐DäėĘĮ╩Į,ĘĮŽ“,═©▀^Ė─ūā═ŌĢrńŖŅl┬╩üĒĖ─ūā▐Däė╦┘Č╚,▀@Įo═Ļ│╔Å═ļsĄ─äėū„║═£yįć▓Į▀MļŖÖCģóöĄÄ¦üĒ┴╦śO┤¾Ą─ĘĮ▒Ń.
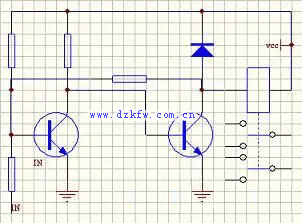
2. ▓Į▀MļŖÖCĄ─ųŪ─▄“īäėĘĮ░Ė
▓Į▀MļŖÖCėą┐╔ęįŠ½┤_┐žųŲĄ─ā׳cŻ¼Ą½╩Ū╣”║─┤¾Ż¼ą¦┬╩Ą═Ż¼┴”ŠžąĪĪŻ╚ń╣¹▀xė├┤¾╣”┬╩▓Į▀MļŖÖCŻ¼×ķ┴╦ĮĄĄ═╣”║─Ż¼┐╔ęį▓╔╚ĪPWM║Ń┴„┐žųŲĄ─ĘĮĘ©ĪŻ╗∙▒Š╦╝┬Ę╩ŪŻ¼ė├ĦĘ┤üĄ─Ė▀ŅlPWMĖ∙ō■▌ö│÷╣”┬╩Ą─ę¬Ū¾ī”├┐ŽÓ║Ń┴„“īäėŻ¼┐é¾wļŖ┴„Ēśą“ėųĘ¹║Ž▐DäėĒśą“ĪŻąĶę¬┴”ŠžąĪĄ─Ģr║“æ¬╝░Ģr£pąĪļŖ┴„Ż¼ęįĮĄĄ═╣”║─ĪŻįōĘĮ░ĖīŹ¼FĄ─ļŖ┬ĘŻ¼┐╔ęį▓╔ė├¬Ü┴óĄ─å╬Ų¼ÖC╗“CPLD╝ėł÷ą¦æ¬╣▄“īäėļŖ┬Ęęį╝░ļŖ┴„▓╔śėĘ┤üļŖ┬ĘĪŻ
░╦Īó ĖĮõøŻ║ÄūĘNIRFł÷ą¦æ¬╣▄Ą─ģóöĄ
| ą═╠¢ | śOąį | ļŖē║(V) | ļŖ┴„(A) | ī¦═©ļŖūĶ(Ohm) |
| IRF540N | N | 100 | 33 | 0.040 |
| IRF9540 | P | -100 | -19 | 0.200 |
| IRF840 | N | 500 | 8 | 0.850 |
| IRF3205 | N | 55 | 110 | 0.008 |
| IRF530N | N | 100 | 17 | 0.090 |
| IRF9530 | P | -100 | -12 | 0.300 |
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū