
同步電動機勵磁裝置的工作原理,同步電動機各部分組成:
1.滅磁電路
同步電動機啟動時勵磁繞組既不能開路,也不能短路。開路將使勵磁繞組感應過電壓.從而破壞其絕緣:短路將使勵磁繞組流過較大的電流。為了避免勵磁繞組在啟動時遭受較高電壓或較大電流的侵害,應在啟動時使勵磁繞組串聯適當阻值的滅磁電阻并形成閉合回路,這個閉合回路可使勵磁繞組的摩應電壓不至于過高,流過的電流不至于過大。同步電動機投入勵磁后.滅磁電阻自動退出.為了實現這一電路效果,在勵磁回路中加入了滅磁環節。具圖中v是勵磁電壓表,KP1和KP2是滅磁晶閘管(文字符號沿用勵磁裝置標注)。同步電動機通電啟動后至投入勵磁前的一段時間內.勵磁裝置不向三相全控橋上的晶閘管發送觸發信號.三相全控橋的晶閘管處于阻斷狀態,無直流電輸出。
同步電動機啟動時,轉子勵磁繞組感應交變電壓,當該感應電壓在勵磁繞組B端為正的半個周期時,二極管D3導通,感應電壓經RF2、D3、RF1形成回路。由于放電電阻RF1和RF2阻值較小,所以感應電壓經該回路放電后已經很小,同樣由于放電電阻RF1和RF2的純在,勵磁繞組中的電流被限制在較安全的數值范圍以內。當感應電壓在勵磁繞組A端為正(見下圖)的半個周期時,二極管D3截止。該半個周期剛開始時感應電壓幅值較小,達不到晶閘管KPI和KP2的導通電壓,感應電流通過電阻RF1、R1、R2、電位器RP1和電阻R3、R4、電位器RP2、電阻RF2等元件形成回路。由于該回路電阻值較大,是轉子勵磁繞組直流電阻的數干倍,所以相當于在開路狀態啟動,感應電壓急劇上升.當感應電壓達到一定值后,穩壓管DW1和DW2擊穿導通(擊穿DWl的是電位器RP1上的電壓降,之后經二極管D1向晶閘管KP2提供觸發電流,晶閘管KP2隨之導通:穩壓管DW2擊穿與晶閘管KP1導通的機理與此類似).晶閘管KP2與KPI導通,勵磁繞組的感應電壓經過晶閘管KP2和KP1.與放電電阻RF1和RF2構成一個阻值較小的放電回路放電。直到這半個周期結束時.晶閘管KP1和KP2由于電壓過零而自行關斷。
調整電位器RP1和RP2的阻值.實際上調整的就是勵磁繞組感應電壓達到多大數值時讓晶閘管KP2和KPI導通。
注意調整時應使兩只晶閘管盡可能同步導通。
下圖中的按鈕SB可用來檢測滅磁電路正常與否。檢測時,使勵磁裝置處在調試狀態.勵磁電壓、勵磁電流均應為設定值,這時操作按鈕SB使其觸點閉合,電阻R5與R1、R2并聯.R6與R3.
R4并聯,由于R5和R6阻值較小,這就相對增加了電位器RP1和RP2上的電壓降,滅磁晶閘管更容易導通。所以此時勵磁電壓表指示回零:松開按鈕使之復位后,電壓表恢復正常值。
同步電動機在啟動過程中,轉子勵磁繞組經滅磁后的電壓波形幅度已經大幅度減小,并被限制在安全數值范圍內。
穩壓管DWI、DW2對晶閘管KP2和KP1起開關控制的作用,投入勵磁后,直流勵磁電壓在電位器RP1、RP2上的壓降低于穩壓管DWI、DW2的擊穿電壓,穩壓管不能導通,晶閘管KP2和KPI處于關閉狀態。
下圖中KPI和KP2的公共端與三相全控整流橋的C相相連,這條連接線叫做熄滅線.當投入勵磁后KPI和KP2必須關閉.否則勵磁電路要為滅磁電阻提供電流。投入勵磁后.C相上連接的兩只整流晶閘管將會先后導通,必將使與之等效并聯的晶閘管KPI、KP2在一個電源周期時間內被短路而截止,滅磁電阻自動退出電路。
以上描述的雙重措施可以保證勵磁裝置對同步電動機投入勵磁后滅磁電路及時退出工作狀態。
滅磁電路

2.投全壓及投勵
同步電動機在降壓啟動過程中.電動機轉速達到同步轉速的90%時.給定子繞組投入全壓,即IOO%額定電壓:電動機轉速達到同步轉速的95%時(無論全壓啟動還是降壓啟動).給轉子繞組投入勵磁電流,將轉速拉人同步。
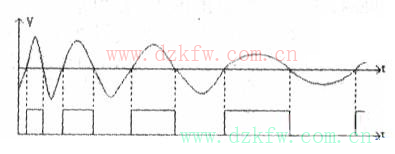
同步電動機啟動時,勵磁繞組兩端感應一個頻率由50Hz向OHz逐漸降低的正弦波電壓,該電壓頻率值與滑差值相對應,如下圖中的上部波形所示。勵磁裝置將轉子感應的上述正弦波電壓轉化為方波信號(如下圖中的下部波形所示)送給相關控制電路.控制電路檢測方波信號的脈寬,并由此判斷脈寬對應的頻率以及同步電動機的轉速。當轉速達到預設的投全壓值時(轉速達到同步轉速的90%時).相應繼電器觸點動作,控制投入全電壓;當轉速達到預設的投勵值(轉速達到同步轉速的95%時)且在方波上升沿時(確保順極性投勵).開始向三相全控橋發送觸發脈沖信號.三相全控整流橋開始有整流輸出電壓.向勵磁繞組投入勵磁電流。
當按滑差投全壓及投勵在設定的時間內無法完成,控制電路將會發出強制投全壓及投勵的信號,稱作定時投全壓與投勵。一般設定投全壓的時間為3s,定時投勵的時間為Ss。
波形
3.觸發電路
觸發電路通過調整加到晶閘管上的觸發信號的移相角來控制晶閘管的導通程度,亦即控制三相全控橋的整流輸出電壓,達到調節勵磁電壓和勵磁電流的目的。
下列情況之一的條件出現時.觸發信號的移相角應該而且必須改變。觸發電路根據這些控制信息,迅速及時準確控制晶閘管的導通角,保證同步電動機持續穩定地運行。
(l)用電位器或其他適當方式調整給定的勵磁電壓和勵磁電流時:
(2)同步電動機在啟動過程中轉速達到額定轉速的95%投勵時:
(3)同步電動機定子繞組和勵磁裝置電源電任波動,通過相關控制電路穩定勵磁時:
(4)同步電動機定子繞組和勵磁裝置電源電壓降低到額定電壓80%啟動強勵時:
(5)同步電動機整步過程中。
4.勵磁電流的給定、穩定調節及強勵
勵磁電流的給定功能是調節控制勵磁電壓的高低和勵磁電流的大小。給定值是根據同步電動機的運行需求.預先設定的一個適當的勵磁電流值;穩定調節是根據電源電壓的高低.利用負反饋電路控制與調節勵磁電流的大小.使之盡可能接近或等于給定的勵磁電流;強勵功能是電源電壓下降到額定電壓的80%時,自動強制提高勵磁電壓和勵磁電流的一種技術措施,可以保證同步電動機在電壓降低時能夠穩定持續運行。
給定電路使用一個電壓非常穩定的直流電源,該電源的交流輸入電壓相對較高,經過橋式整流和電容器濾波后的電壓幅值相應也較高。之后用一個雪崩電壓較低的穩壓二極管削波穩壓后.得到電壓幅值較小但幾乎沒有任何紋波的穩定直流電壓。用一個電位器對這個穩定電壓調整分壓,取得給定電壓.用來調整勵磁電流。選用這樣的直流電源,就是為了讓給定電壓信號非常穩定.從而保證勵磁電流的穩定。為了分析方便,我們將這個電壓稱作U1。
穩定調節采用負反饋調節原理進行。負反饋調節信號電壓是隨交流電源電壓變化的一個直流電壓.也用一個電位器對這個電壓進行調整分壓,獲得一個隨電源電壓變化的負反饋信號電壓。
我們把這個電壓稱作U2。將上述電壓,UI和U2極性相反的串接起來取其差值U3.用電壓U3調整觸發電路的移相角,并最終控制三相全控整流橋中晶閘管的導通角,這就實現了對勵磁電流的自動控制過程,并保持勵磁電流的穩定。
強勵電路則實時檢測電源電壓的變化,當檢測到電源電壓降低到額定電壓80%或以下時,相關電路讓一個機械觸點由斷開變為閉合.或者輸出一個類似功能的電子信號。這種電路狀態的變化通過后續電路抬高上述勵磁控制電壓U3的幅值,使勵磁裝置輸出的勵磁電壓、勵磁電流達到未強勵時勵磁電壓、勵磁電流的某一倍數,實現強勵磁。如果強勵磁達到一定時限,例如5秒鐘,或者10秒鐘,而交流電源電壓仍未回升.則勵磁裝置將退出強勵狀態。
5.失步保護電路
同步電動機在運行中可能會由于某種原因出現脫離同步的現象,這種運行狀態稱為失步。同步電動機失步將會引起嚴重的電流、電壓、功率及轉速的振蕩,對電網和電動機產生很大沖擊。同步電動機的失步原因很多.主要有以下3種:一是電網電壓由于某種原因.如附近其他較大負載投入等.引起電網電壓暫時跌落,而導致同步電動機失步,叫作帶勵失步。二是勵磁裝置本身故障致使失去勵磁引起的失磁失步。三是電網高壓側發生跳閘保護動作之后又重新合閘,從而導致同步電動機失步,即斷電失步。
當主控單元檢測并確定電機失步后,立即封鎖投勵信號.使電機進入異步驅動狀態,然后電機轉速將上升.待進入臨界滑差后.裝置自動控制勵磁系統.按準確強勵對電機實施整步,使電機恢復到同步狀態。如整步失敗,仍存在失步信號,則裝置發出眺閘信號動作于跳閘回路。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底