
ŌŧĄĒINPUTšÍOUTPUT
1.ŪŌýÄ_ÔOÖÃéINPUT îB(tĻĪi)rĢŽŌýÄ_éļßŨčŋđ îB(tĻĪi)ĢĻ100ÕŨWĢĐĄĢīËrŌýÄ_ŋÉŌÔÓÃÓÚŨxČĄũļÐÆũÐÅĖŧōé_ęPÐÅĖĄĢ
2.ŪŌýÄ_ÔOÖÃéOUTPUT îB(tĻĪi)rĢŽŌýÄ_éĩÍŨčŋđ îB(tĻĪi)ĄĢß@ŌâÎķÖøArduinoŋÉŌÔÏōÆäËüë·ԊÆũžþĖáđĐëÁũĄĢŌēūÍĘĮÕfĢŽArduinoŌýÄ_ÔÚÝģöĢĻOUTPUTĢĐÄĢĘ―ÏÂŋÉŌÔëÁÁLEDŧōÕßō(qĻą)ÓëCĄĢ
3.INPUT_PULLUPÄĢĘ―ĢšArduinoÎĒŋØÖÆÆũŨÔ§Č(nĻĻi)ēŋÉÏĀëŨčĄĢÔÚÔÄĢĘ―ÏÂŋÉŌÔĘđÓÃÔČ(nĻĻi)ēŋÉÏĀëŨčĄĢ
ķþĄĒŌýÄ_ĩÄŨũÓÃ
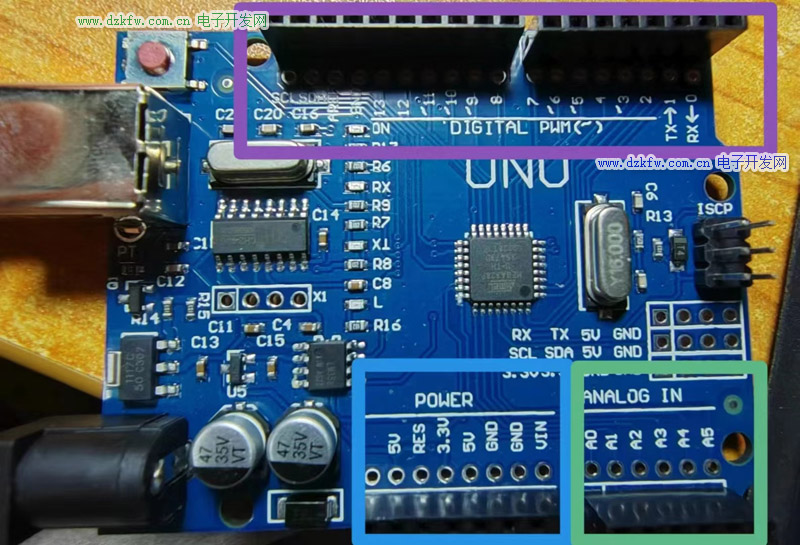
1.ĩ(shĻī)ŨÖŌýÄ_Ģš
ĄņŌýÄ_1Ģ13ÓÃŨũĩ(shĻī)ŨÖÝČë/ÝģöŌýÄ_ĄĢÆäÖÐĢŽŌýÄ_13ßB―Óĩ―°åÝdĩÄLEDÖļĘūôĢŧŌýÄ_ 3ĄĒ5ĄĒ6ĄĒ9ĄĒ10ĄĒ11ūßÓÐPWMđĶÄÜĄĢ
Ąņĩ(shĻī)ŨÖŌýÄ_ŋÉŌÔé_ĒŧōÕßęPé]ĄĢīōé_rĢŽĖÓÚ5VĩÄļßëÆ― îB(tĻĪi)ĢŧęPé]rĢŽĖÓÚ0VĩÄĩÍëÆ― îB(tĻĪi)ĄĢ
ĄņŪĩ(shĻī)ŨÖŌýÄ_ÅäÖÃéÝģörĢŽËüÔOÖÃé0ŧō5VĄĢŪÅäÖÃéÝČërĢŽëšŋÉŌÔÔÚ0Ģ5VÖŪégŨŧŊĢŽ ēĒÞDQéĩ(shĻī)ŨÖąíĘūĢĻ0ŧō1ĢĐĄĢ
ĄņÃ}Õ{(diĻĪo)ÖÆĢĻPWMĢĐĘĮŌŧ·NÕ{(diĻĪo)ÖÆžžÐgĢŽÓÃÓÚĒÏûÏĒūīaéÃ}_ÐÅĖĄĢpwmÓÉÉęPæIēŋ·Ö―MģÉĢšîlÂĘšÍÕžŋÕąČĄĢîlÂĘQķĻÍęģÉÎÖÜÆÚËųÐčŌŠĩÄrégŌÔž°ÐÅĖÄļßĩ―ĩÍĩÄēĻÓËŲķČĄĢÕžŋÕąČQķĻÐÅĖÔÚŋrégķÎČ(nĻĻi)ąĢģÖļßëÆ―ĩÄrégĄĢ
2.ëÔīĢš
ĄņVINŌýÄ_ĢšĘđÓÃÍâēŋëÔīéUNOé_°l(fĻĄ)°åđĐë
Ąņ5VšÍ3.3VĢšÏōÍâēŋ―MžþĖáđĐ·(wĻ§n)šĩÄ5VšÍ3.3V
ĄņRESETŌýÄ_ĢšÍÎŧArduinoé_°l(fĻĄ)°å
3.ÄĢMÝČëĢš
ĄņA0ĢA5ŨũéADCĢĻÄĢĩ(shĻī)ÞDQÆũĢĐĄĢß@ÐĐŌýÄ_ÓÃŨũÄĢMÝČëĢŽĩŦŌēŋÉŌÔÓÃŨũĩ(shĻī)ŨÖÝČëŧōÕßÝģöĄĢ
ĄņÄĢĩ(shĻī)ÞDQĢšADCĘĮÓÃÓÚĒÄĢMÐÅĖÞDQéĩ(shĻī)ŨÖÐÅĖĩÄëŨÓë·ĄĢŌýÄ_A0ĢA5ÄÜōŨxČĄÄĢM뚥ĢADCŋÉŌÔÍĻß^1024ĩ(shĻī)ŨÖëÆ―ąíĘūÄĢMëšĢŽĒëšÞDQéÎĒĖĀíÆũŋÉŌÔĀí―âĩÄÎŧĄĢe.g IPÕZŌôĢĻĒÂēĻÞDQéÄĢMëšĢŽÍĻß^ÔOäĩÄADCĢŽÞDQģÉĩ(shĻī)ŨÖĩ(shĻī)þ(jĻī)ĢŽÍĻß^ŧĨÂ(liĻĒn)ūW(wĻĢng)ũÝ?shĻī)――ÓĘÕķËĄ?/P>
ČýĄĒPWMĢĻ·―ēĻŋØÖÆÐÅĖĢĐ
1.đĪŨũÔĀíĢšēÉÓÃēŧÍŽĩÄÕžŋÕąČíÄĢMĄ°ÄĢMÝģöĄąĄĢ
2.ŨũÓÃĢš
ĄņĖáđĐÄĢMÝģöĢŧČįđûĩ(shĻī)ŨÖÝģöąŧß^VĢŽtÆäÄĢMëšĒ―éÓÚ0%Ģ100%ÖŪég
ĄņÉúģÉŌôîlÐÅĖ
ĄņŋØÖÆôđâÁÁķČĢŽéëCĖáđĐŨËŲŋØÖÆ
ĄņÉúģÉÕ{(diĻĪo)ÖÆÐÅĖĢŽĀýČįō(qĻą)ÓÓÃÓÚßhģĖŋØÖÆĩÄžtÍâLED
3.ĘđÓÃĢš
ĄņanalogWrite(pin,dutyCycle)
pinÖĩßxņĢĻ3ĢŽ5ĢŽ6ĢŽ9ĢŽ10ĢŽ11ĢĐĢŽdutyCycleĩÄÖĩÔÚ0~255ÖŪégĄĢß@·N·―Ę―pwmÐÅĖĩÄîlÂĘĘĮđĖķĻĩÄÄŽÕJÖĩĢĻ490HzĢĐĄĢ
# define analogPin 3
void setup()
{
pinMode(analogPin,OUTPUT);
}
void loop()
{
analogWrite(analogPin,100); // ÝģöPWMĢŽÕžŋÕąČé 100/255
}
ĄņdelayMicroseconds()ĘÖÓŽF(xiĻĪn)îlÂĘŋÉÕ{(diĻĪo)ĩÄPWM
ĢĻ1ĢĐÉīÎĩÄdigitalWriteÝģö îB(tĻĪi)ąØíÏā·īĢŧ
ĢĻ2ĢĐŋÉŌÔÓÃdelayĢĻĢĐŽF(xiĻĪn)šÁÃëžŅÓßtĢŽÓÃdelayMicrosecondsĢĻĢĐŽF(xiĻĪn)ÎĒÃîžŅÓßt
ĢĻ3ĢĐĖØüc
1.pwmĩÄąČĀýŋÉŌÔļüūŦī_
2.ÖÜÆÚšÍîlÂĘŋÉŋØÖÆ
3.ËųÓÐpinÄ_ķžŋÉŌÔÝģöĢŽēŧHūÖÏÞÓÚ6Ä_
4.ČąücĢšCPUo·ĻßMÐÐÆäËûŧîÓ
void setup()
{
pinMode(8, OUTPUT); // ÔOÖÃ8ĖŌýÄ_éÝģöÄĢĘ―
}
void loop()
{
digitalWrite(8, HIGH);
delayMicroseconds(100); // ÝģöPWMĢŽÕžŋÕąČé100/1000=10%
digitalWrite(8, LOW);
delayMicroseconds(1000 - 100); // ÐÞļÄß@ĀïĩÄ1000ŋÉŌÔÕ{(diĻĪo)ÕûîlÂĘĢŽŋÖÜÆÚé1000us,ËųŌÔîlÂĘé1000Hz.
}
ËÄĄĒČýķÎīúīaĩÄ ^(qĻą)e
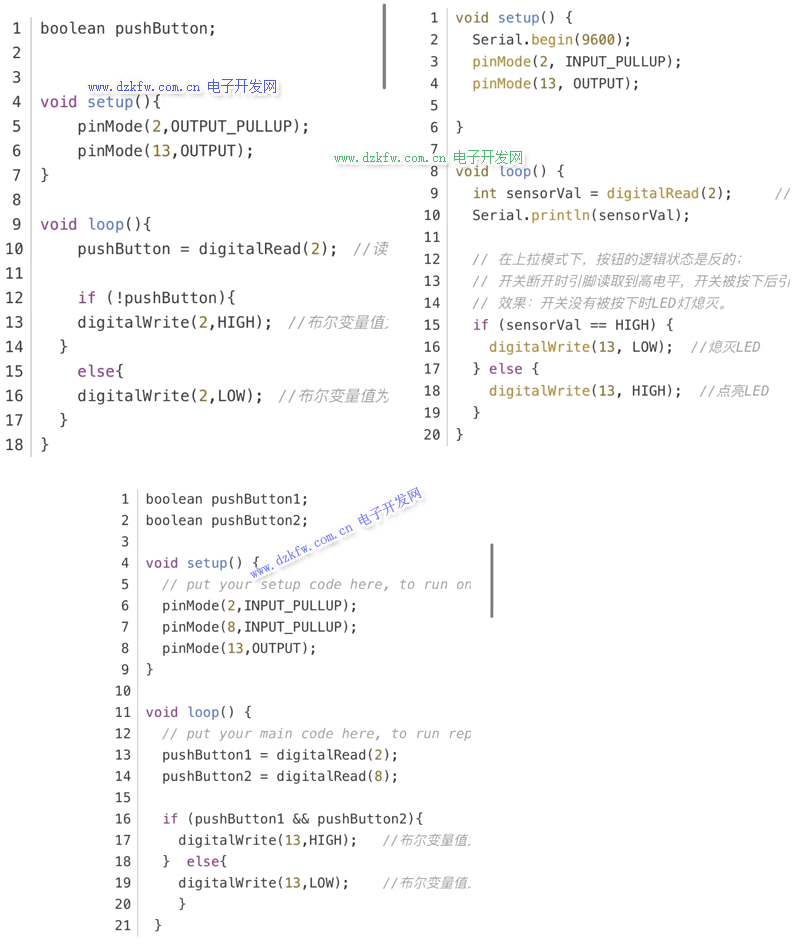
ĄņĩÚŌŧķÎīúīaķĻÁxÁËŌŧēž ÐÍŨÁŋpushButtonĢŽĒ2ĖŌýÄ_ĩÄëÆ― îB(tĻĪi)Ųx―opushButtonĢŽēĒÖą―Óļųþ(jĻī)pushButtonĩÄÕæžŲŲxÓč1/0ßMČëlžþÅÐķĻĢŽÍŽrÔÚÅÐķĻržÓČëÁËßÝß\Ëã·ûĢĄĢŽĘđĩÃÅÐķĻĩÄÖĩÏā·īĄĢËųŌÔÔīúīaĩÄß\Ëã―Yđûé°īÏ°īâorLEDôÁÁĢŽËÉé_°īâorLEDôēŧÁÁĄĢ
ĄņĩÚķþķÎīúīaķĻÁxÁËŌŧÕûÐÎŨÁŋsensorValĢŽĒ2ĖŌýÄ_ĩÄëÆ― îB(tĻĪi)Ųx―osensorValĢŽÔÚlžþÅÐķĻrĢŽ°īâoĩÄßÝ îB(tĻĪi)ĘĮ·īĩÄĢŽŪ°īâo]ÓаīÏÂrĢŽ2ĖŌýÄ_éļßëÆ― îB(tĻĪi)ĢŽÔÚifÕZūäÖÐŌŠĘđ13ĖŌýÄ_éĩÍëÆ― îB(tĻĪi)ĢŽLEDôēŧÁÁĢŽŪ°īâo°īÏÂrtÏā·īĄĢÍŽrÔķÎīúīaĩÄĩÚ2ÐКÍĩÚ10ÐÐßĒÓÁËīŪŋÚÍĻÓĢŽēĒ°ŅËŲÂĘÕ{(diĻĪo)ĩ―9600ĢŽtÓÃôŋÉŌÔÔÚīŪŋÚÖÐŋīĩ―sensorValĩÄÖĩĄĢ
ĄņĩÚČýķÎīúīaß\ÓÃÁËÉ°īâoēŲŨũĢŽŌōīËķĻÁxÁËÉbooleanŨÁŋĄĢĩŦÔÚifÕZūäĩÄÅÐķĻÖÐ]ÓÐĘđÓÃĢĄß\ËãĢŽžīß\ÐÐ―YđûéŪÉ°īâoķž]ÓаīÏÂrĢŽ13ĖŌýÄ_ĩÄ îB(tĻĪi)éļßëÆ―ĢŽLEDôÁÁĢŧŪ°īÏÂÁËÆäÖÐŌŧ°īâoŧōÕßÉ°īâorĢŽ13ĖŌýÄ_éĩÍëÆ― îB(tĻĪi)ĢŽLEDôēŧÁÁĄĢ
ÎåĄĒßÝß\Ëã·û
Ąņ&&ßÝÅcĢšÖŧÓÐÔÚÉēŲŨũĩ(shĻī)ķžéÕærēÅ·ĩŧØÕæĄĢ
Ąņ&ĢšČĄĩØÖ·ĩÄÎÄŋß\Ëã·ûĢŧÎŧß\Ëã·ûĢŽąíĘūĄ°°īÎŧÅcĄąĢŽĘĮëpÄŋß\Ëã·ûĄĢ
Ąņ||ßÝŧōĢšČÎŌâŌŧéÕær·ĩŧØÕæĄĢ
ĄņĢĄßÝ·ĮĢšŪēŲŨũĩ(shĻī)éžŲr·ĩŧØÕæĄĢ
ÁųĄĒīŪŋÚÍĻÓ
void setup(){
Serial.begin(9600);
}
void loop(){
if (Serial.available()){
int value=Serial.read();
}
1.Serial begin(9600)
ÔOÖÃīŪŋÚÍĻÐÅēĻĖØąČÂĘé9600
2.if(Serial.avilable())
ÅÐāArduinoīŪŋÚĘĮ·ņĘÕĩ―ĩ(shĻī)þ(jĻī)ĢŽšŊĩ(shĻī)Serial.availableĢĻĢĐ·ĩŧØÖĩéintÐÍĢŽēŧ§
Ēĩ(shĻī)
3.int var=Serial.read()
ĒīŪŋÚĩ(shĻī)þ(jĻī)ŨxČëĩ―ŨÁŋvarÖÐĢŽšŊĩ(shĻī)Serial.read()Ōēēŧ§
Ēĩ(shĻī)ĢŽ·ĩŧØÖĩéīŪŋÚĩ(shĻī)þ(jĻī)ĢŽintÐÍ
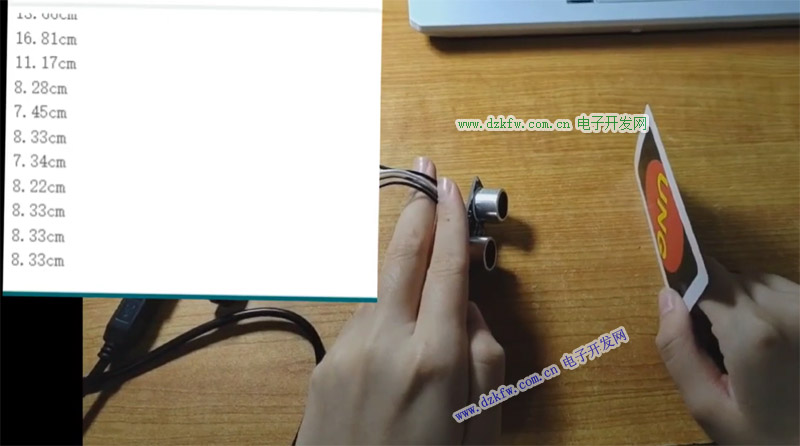
ÆߥĒũļÐÆũ
1.ÖũŌŠ
Ēĩ(shĻī)
vccĢš5VëÔī
Trig:ŋØÖÆķËĢĻÓ|°l(fĻĄ)ĢĐ
Echo:―ÓĘÕķËĢĻŧØÂĢĐ
Gnd:―ÓĩØķË
Ė―yūāëxĢš2cmĢ450cm
ļЊ―ĮķČĢš<15ķČ
Ė―yūŦķČĢš0.3cm
2.đĪŨũÔĀí
const int TrigPin=8; //ÔOÖðl(fĻĄ)ÉäÄ_Îŧ
const int EchoPin=9; //ÔOÖÃ―ÓĘÕÄ_Îŧ
float cm; //ļĄücÐÍĩ(shĻī)þ(jĻī)îÐÍĢĻžÓÐĄĩ(shĻī)ücĢŽĖáļßūŦĘķČĢĐ
void setup() {
Serial.begin(9600);
pinMode(TrigPin,OUTPUT);
pinMode(EchoPin,INPUT);
}
void loop() {
digitalWrite(TrigPin,LOW); //ÓÃĩÍļßĩÍëÆ―°l(fĻĄ)ËÍÃ}_―oTrigpinŌýÄ_
delayMicroseconds(2); //ÎĒÃëžŅÓr
digitalWrite(TrigPin,HIGH);
delayMicroseconds(10);
digitalWrite(TrigPin,LOW);
cm=pulseIn(EchoPin,HIGH)/58.0; //ŨxČĄÃ}_ķČĢŽQËãģÉĀåÃŨ
Serial.print(cm); //ï@Ęūūāëx
Serial.print("cm"); //ï@ĘūÎÎŧ
Serial.println(); //ŧØÜ
delay(1000);
}
ĄņconstĩÄŨũÓÃĘĮĒķĻÁxĩÄÄ_ÎŧīæĶÔÚÖŧŨxīæĶÆũĢŽžīīæĶÔÚUNO°åĩÄÓēąPŪÖÐĢŽÔÚß\ÐÐß^ģĖÖÐđ(jiĻĶ)žsUNO°åĩÄŲYÔīĄĢ
ÔÚCÕZŅÔÖÐĢŽęPæIŨÖconstÓÃíķĻÁxģĢÁŋĢŽĢŽČįđûŌŧŨÁŋąŧconstÐÞïĢŽÄĮÃīËüĩÄÖĩūÍēŧÄÜÔŲļÄŨĄĢ
ĄņpulseInšŊĩ(shĻī)ÆäūÍĘĮŌŧšÎĩÄyÁŋÃ}_ķČĩÄšŊĩ(shĻī)ĢŽÄŽÕJÎÎŧĘĮus=10^Ģ6sĄĢŌēūÍĘĮÕfpulseInyģöíĩÄĘĮģŽÂēĻÄ°l(fĻĄ)Éäĩ――ÓĘÕËų―(jĻĐng)ß^ĩÄrégĄĢĶÓÚģýĩ(shĻī)58ŌēšÜšÃĀí―âĢŽÂŌôÔÚļÉÔïĄĒzĘÏ 20ķČĩÄŋÕâÖÐĩÄũēĨËŲķČīóžsé343ÃŨ/ÃëĢŽšÏ34,300ĀåÃŨ/ÃëĄĢŧōÕßĢŽÎŌŨũŌŧÏÂÎÎŧQËãĢŽ34,300ģýŌÔ1,000,000ĀåÃŨ/ÎĒÃëĄĢžīéĢš0.0343ĀåÃŨ/ÎĒÃëĢŽÔŲQŌŧ―ĮķČĢŽ1/ĢĻ0.0343 ĀåÃŨ/ÎĒÃëĢĐžīĢš29.15 ÎĒÃë/ĀåÃŨĄĢß@ūÍŌâÎķÖøĢŽÃŋ291.5ÎĒÃëąíĘū10CMĩÄūāëxĄĢ1ĀåÃŨūÍĘĮ29.15ÎĒÃëĄĢĩŦĘĮ°l(fĻĄ)ËÍšóĩ――ÓĘÕĩ―ŧØēĻĢŽÂŌôŨßß^ĩÄĘĮ2ąķĩÄūāëxŅ―ĄĢËųŌÔëHūāëxūÍĘĮ1ĀåÃŨĢŽĶŠ58.3ÎĒÃëĄĢëHÉÏÕûyūāß^ģĖĘĮyĩÄ°l(fĻĄ)ģöÂēĻĩ―ĘÕĩ―ŧØēĻĩÄrégĢŽÄãĩÄģĖÐōĀïĩÄĩÚŌŧdistanceëHÉÏĘĮrégusĄĢËųŌÔQģÉūāëxcmĢŽŌŠģýŌÔ58ĄĢŪČŧģýŌÔ58.3ŋÉÄÜļüūŦī_ĄĢËųŌÔÎŌŋÉŌÔÓà pulseIn(EchoPin, HIGH) / 58.00Ŧ@ČĄyĩÃĩÄūāëxĄĢ
 ·ĩŧØíēŋ
·ĩŧØíēŋ ËĒÐÂíÃæ
ËĒÐÂíÃæ ÏÂĩ―íĩŨ
ÏÂĩ―íĩŨ