
引言:什么是自由度,自由度在各個學科中有著不同的含義,若是依據機械原理的話,其含義為機構的位置得以確定時必須給出獨立運動參數的數目,這也被稱之為機構自由度。本文主要介紹機械臂自由度的含義,以及機械臂自由度的計算方式。
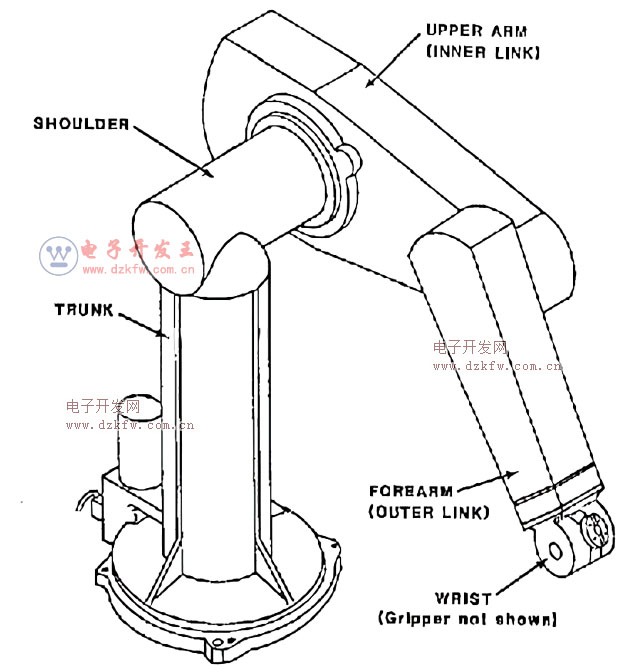
機械臂類似于人的手臂,是一種多自由度機器人,由多個驅動關節通過機械臂本身的機械結構逐個連接而成,其末端可以實現空間的多自由度運動。在末端安裝機械手、吸盤、焊槍、噴嘴等執行器,就可以代替人們進行部分高強度、高危的重復工作。
機械臂的自由度通常有六個自由度,一般專用的機械臂只有兩個到四個自由度,而通用機械臂則大多數為三個到六個自由度。機械臂自由度越高,其機構所執行的動作也就越復雜。下面先為大家簡單介紹一下機械臂自由度的含義。
機械臂自由度
機械臂自由度的含義
機械臂上能夠獨立運動的關節數目,被稱之為機械臂的運動自由度。工業機器人采取的控制方法就是把機械臂上的每一個關節都當成一個單獨的伺服機構,并且每個軸都對應著一個伺服器,每一個伺服器都是通過總線來進行控制,由控制器進行統一控制并協調工作。
在設計工業機器人時一般會采用六個自由度,分別為沿x軸、y軸、z軸平移;繞x軸、y軸、z軸旋轉,前面三個自由度是用于確定位置,后面三個自由度則是用于確定姿態,以實現對機械臂的控制。一個基準面與物體底面重合,限制了物體沿z軸平移,繞x軸旋轉,繞y軸旋轉三個自由度;二個基準面又與物體后側面重合,限制了物體沿x軸平移,繞z軸旋轉二個自由度;三個基準面與物體另一個側面重合,限制了物體沿y軸平移一個自由度。
若根據機械臂不同的結構形式可分為水平多關節機械臂和直角坐標系機械臂等。水平多關節機械臂一般會有Z1軸旋轉、Z2軸旋轉、Z軸平移這三個主自由度,通過在執行末端加裝X軸旋轉和Y軸旋轉就可以到達空間內任何一個坐標點。直角坐標系機械臂一般由X軸平移,Y軸平移,Z軸平移這三個主自由度組成,通過在執行末端加裝X軸旋轉、Y軸旋轉和Z軸旋轉就可以到達空間內任何一個坐標點。
機械臂自由度的計算方式
機械臂自由度的計算是在設計機械臂時的先決條件,通過計算機械臂的自由度,就可以得知機械臂可能產生的運動方式,如若是機械臂的關節只需要上下移動,則必須限制關節繞X軸、Y軸、Z軸的轉動,以及沿X軸、Y軸方向的移動。機械臂的自由度可分為平面自由度和空間自由度,可利用簡單的計算方式計算出它們的自由度。

機械臂自由度
平面自由度的計算方式。假如機械臂所有的關節為k,減去固定構件(機座),則機械臂運動的關節數量為n=k-1。在沒有用運動副連接前,這些關節的自由度總數為3n。當運動副將這些關節連接起來組成機械臂之后,機械臂中各個關節具有的自由度就減少了,若機械臂中的低副數有PL個,高副數有PH個,而機械臂中全部的運動副所引入的約束總數有2PL+PH。所以,關節自由度的總數減去運動副所引入的約束總數等于該機械臂的自由度,即F=3n-2PL-PH就是計算平面自由度的方式。
空間自由度的計算方式。首先,我們需要知道機械臂在空間是具有六個自由度的,不同于在平面具有的三個自由度。它們的計算方式基本相同,都是關節自由度的總數減去運動副引入的約束總數等于該機械臂的自由度,計算方式:F=6n-5P5-4P4-3P3-2P2-P1。F表示機械臂的自由度,6n表示關節自由度的總數,P1、P2、P3、P4、P5分別表示1-5級運動副的個數。
瀏覽以上文章可以了解到機械臂自由度的含義以及計算方式,機械臂上能夠獨立運動的關節數目,就是機械臂的自由度。通常要在設計機械臂時,我們會使用到其自由度的計算方式,通過計算方式來得知機械臂可能產生的運動方式。關注我們,了解更多有關機械臂自由度的知識與應用。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底