
1Īó║åĮķ
CAN╩Ū┐žųŲŲ„Šųė“ŠWĮj(Controller Area Network, CAN)Ą─║åĘQŻ¼╩Ūę╗ĘN─▄ē“īŹ¼FĘų▓╝╩ĮīŹĢr┐žųŲĄ─┤«ąą═©ą┼ŠWĮjĪŻ
ā׳cŻ║
é„▌ö╦┘Č╚ūŅĖ▀ĄĮ1MbpsŻ¼═©ą┼ŠÓļxūŅ▀hĄĮ10kmŻ¼¤oōp╬╗ų┘▓├ÖCųŲŻ¼ČÓų„ĮYśŗĪŻĮ³ą®─ĻüĒŻ¼CAN┐žųŲŲ„ārĖ±įĮüĒįĮĄ═ĪŻ
Ø Ą═│╔▒ŠŻ║ECUs═©▀^å╬éĆCANĮė┐┌▀Mąą═©ą┼Ż¼▓╝ŠĆ│╔▒ŠĄ═ĪŻ
Ø Ė▀╝»│╔Ż║CAN┐éŠĆŽĄĮyį╩įSį┌╦∙ėąECUs╔Ž▀Mąą╝»ųąÕeš`į\öÓ║═┼õų├ĪŻ
Ø ┐╔┐┐ąįŻ║įōŽĄĮyī”ūėŽĄĮyĄ─╣╩šŽ║═ļŖ┤┼Ė╔ö_Š▀ėą║▄ÅŖĄ─¶ö░¶ąįŻ¼╩ŪŲ¹▄ć┐žųŲŽĄĮyĄ─└ĒŽļ▀xō±ĪŻ
Ø Ė▀ą¦┬╩Ż║┐╔ęį═©▀^idī”Ž¹Žó▀Mąąā׎╚╝ē┼┼ą“Ż¼ęį▒ŃūŅĖ▀ā׎╚╝ēĄ─id▓╗▒╗ųąöÓĪŻ
Ø ņ`╗ŅąįŻ║├┐éĆECU░³║¼ę╗éĆė├ė┌CAN┐éŠĆ╩š░ląŠŲ¼Ż¼ļSęŌ╠Ē╝ėCAN┐éŠĆ╣سcĪŻ
2ĪóCAN┐éŠĆŠWĮj

CAN┐éŠĆŠWĮjų„ę¬Æņį┌CAN_H║═CAN_LŻ¼Ė„éĆ╣سc═©▀^▀@ā╔ŚlŠĆīŹ¼Fą┼╠¢Ą─┤«ąą▓ŅĘųé„▌öŻ¼×ķ┴╦▒▄├Ōą┼╠¢Ą─Ę┤╔õ║═Ė╔ö_Ż¼▀ĆąĶę¬į┌CAN_H║═CAN_Lų«ķgĮė╔Ž120ÜW─ĘĄ─ĮKČ╦ļŖūĶĪŻ×ķ╩▓├┤╩Ū120”ĖŻ¼ę“×ķļŖ└|Ą─╠žąįūĶ┐╣×ķ120”ĖŻ¼×ķ┴╦─ŻöM¤oŽ▐▀hĄ─é„▌öŠĆĪŻ
3ĪóCAN╩š░lŲ„
CAN╩š░lŲ„Ą─ū„ė├╩Ūžōž¤▀ē▌ŗļŖŲĮ║═ą┼╠¢ļŖŲĮų«ķgĄ─▐DōQĪŻ
╝┤Å─CAN┐žųŲąŠŲ¼▌ö│÷▀ē▌ŗļŖŲĮĄĮCAN╩š░lŲ„Ż¼╚╗║¾Įø▀^CAN╩š░lŲ„ā╚▓┐▐DōQīó▀ē▌ŗļŖŲĮ▐DōQ×ķ▓ŅĘųą┼╠¢▌ö│÷ĄĮCAN┐éŠĆ╔ŽŻ¼CAN┐éŠĆ╔ŽĄ─╣سcČ╝┐╔ęįøQČ©ūį╝║╩ŪʱąĶę¬┐éŠĆ╔ŽĄ─öĄō■ĪŻŠ▀¾wĄ─ę²─_Č©┴x╚ńŽ┬Ż║

4ĪóCANą┼╠¢▒Ē╩Š
CAN┐éŠĆ▓╔ė├▓╗Üw┴Ń┤a╬╗╠Ņ│õ╝╝ągŻ¼ę▓Š═╩ŪšfCAN┐éŠĆ╔ŽĄ─ą┼╠¢ėąā╔ĘN▓╗═¼Ą─ą┼╠¢ĀŅæBŻ¼Ęųäe╩Ū’@ąįĄ─(Dominant)▀ē▌ŗ0║═ļ[ą╬Ą─(recessive)▀ē▌ŗ1Ż¼ą┼╠¢├┐ę╗┤╬é„▌ö═Ļ║¾▓╗ąĶę¬ĘĄ╗žĄĮ▀ē▌ŗ0(’@ąį)Ą─ļŖŲĮĪŻ

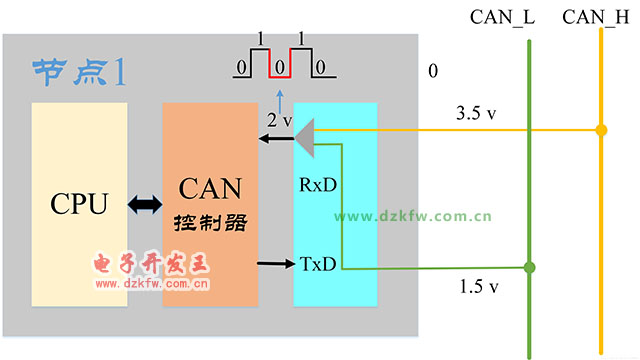
’@ąį┼cļ[ąįļŖŲĮĄ─ĮŌßīŻ║
CANĄ─öĄō■┐éŠĆėąā╔ŚlŻ¼ę╗Śl╩Ū³S╔½Ą─CAN_High,ę╗Śl╩ŪŠG╔½Ą─CAN_LowĪŻ«öø]ėąöĄō■░l╦═ĢrŻ¼ā╔ŚlŠĆĄ─ļŖŲĮę╗śėČ╝×ķ2.5VŻ¼ĘQ×ķņoļŖŲĮŻ¼ę▓Š═╩Ūļ[ąįļŖŲĮĪŻ«öėąą┼╠¢░l╦═ĢrŻ¼CAN_HighĄ─ļŖŲĮ╔²Ė▀1VŻ¼╝┤3.5VŻ¼CAN_LowĄ─ļŖŲĮĮĄĄ═1VŻ¼╝┤1.5VĪŻ
░┤ššČ©┴xĄ─Ż║
-
CAN_H-CAN_L < 0.5V Ģr║“×ķļ[ąįĄ─Ż¼▀ē▌ŗą┼╠¢▒Ē¼F×ķ"▀ē▌ŗ1"- Ė▀ļŖŲĮĪŻ
-
CAN_H-CAN_L > 0.9V Ģr║“×ķ’@ąįĄ─Ż¼▀ē▌ŗą┼╠¢▒Ē¼F×ķ"▀ē▌ŗ0"- Ą═ļŖŲĮĪŻ
5ĪóCANą┼╠¢é„▌ö
░l╦═▀^│╠Ż║ CAN┐žųŲŲ„īóCPUé„üĒĄ─ą┼╠¢▐DōQ×ķ▀ē▌ŗļŖŲĮŻ©╝┤▀ē▌ŗ0-’@ąįļŖŲĮ╗“š▀▀ē▌ŗ1-ļ[ąįļŖŲĮŻ®ĪŻCAN░l╔õŲ„Įė╩š▀ē▌ŗļŖŲĮų«║¾Ż¼į┘īóŲõ▐DōQ×ķ▓ŅĘųļŖŲĮ▌ö│÷ĄĮCAN┐éŠĆ╔ŽĪŻ
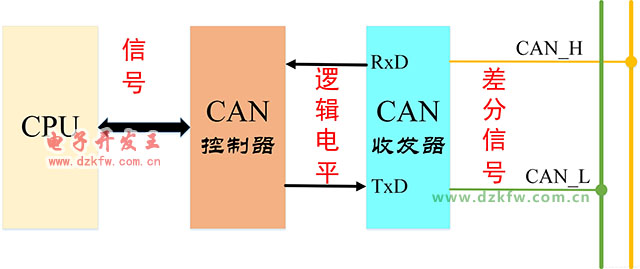
Įė╩š▀^│╠Ż║ CANĮė╩šŲ„īóCAN_H ║═ CAN_L ŠĆ╔Žé„üĒĄ─▓ŅĘųļŖŲĮ▐DōQ×ķ▀ē▌ŗļŖŲĮ▌ö│÷ĄĮCAN┐žųŲŲ„Ż¼CAN┐žųŲŲ„į┘░čįō▀ē▌ŗļŖŲĮ▐D╗»×ķŽÓæ¬Ą─ą┼╠¢░l╦═ĄĮCPU╔ŽĪŻ
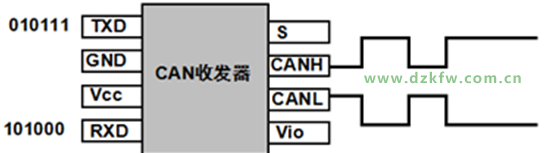
5ĪóCANöĄō■é„▌ö
CAN┐éŠĆé„▌öĄ─╩ŪCANļŻ¼CANĄ─═©ą┼ļĘų│╔╬ÕĘNŻ¼Ęųäe×ķöĄō■ļĪó▀h│╠ļĪóÕeš`ļĪó▀^▌dļ║═ļķgĖ¶ĪŻ
öĄō■ļĖ∙ō■ų┘▓├Č╬ķLČ╚▓╗═¼Ęų×ķś╦£╩ļŻ©2.0AŻ®║═öUš╣ļŻ©2.0BŻ®

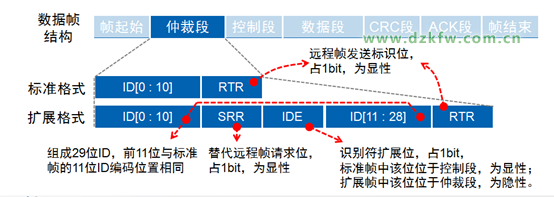
ļŲ╩╝
ė╔ę╗éĆ’@ąį╬╗Ż©Ą═ļŖŲĮŻ®ĮM│╔Ż¼░l╦═╣سc░l╦═ļŲ╩╝Ż¼Ųõ╦¹╣سc═¼▓Įė┌ļŲ╩╝Ż╗
ļĮY╩°
ė╔7éĆļ[ą╬╬╗Ż©Ė▀ļŖŲĮŻ®ĮM│╔ĪŻ

ų┘▓├Č╬
ų╗ę¬┐éŠĆ┐šķeŻ¼┐éŠĆ╔Ž╚╬║╬╣سcČ╝┐╔ęį░l╦═ł¾╬─Ż¼╚ń╣¹ėąā╔éĆ╗“ā╔éĆęį╔ŽĄ─╣سcķ_╩╝é„╦═ł¾╬─Ż¼─Ū├┤Š═Ģ■┤µį┌┐éŠĆįLå¢ø_═╗Ą─┐╔─▄ĪŻĄ½╩ŪCAN╩╣ė├┴╦ś╦ūRĘ¹Ą─ų╬╗ų┘▓├ĘĮĘ©┐╔ęįĮŌøQ▀@éĆå¢Ņ}ĪŻ
CAN┐éŠĆ┐žųŲŲ„į┌░l╦═öĄō■Ą─═¼Ģr▒O┐ž┐éŠĆļŖŲĮŻ¼╚ń╣¹ļŖŲĮ▓╗═¼Ż¼ät═Żų╣░l╦═▓óū÷Ųõ╦¹╠Ä└ĒĪŻ╚ń╣¹įō╬╗╬╗ė┌ų┘▓├Č╬Ż¼ät═╦│÷┐éŠĆĖéĀÄŻ╗╚ń╣¹╬╗ė┌Ųõ╦¹Č╬Ż¼ät«a╔·Õeš`╩┬╝■ĪŻ

ļIDįĮąĪŻ¼ā׎╚╝ēįĮĖ▀ĪŻė╔ė┌öĄō■ļĄ─RTR╬╗×ķ’@ąįļŖŲĮŻ¼▀h│╠ļ×ķļ[ąįļŖŲĮŻ¼╦∙ęįļĖ±╩Į║═ļIDŽÓ═¼Ą─ŪķørŽ┬Ż¼öĄō■ļā׎╚ė┌▀h│╠ļŻ╗ė╔ė┌ś╦£╩ļĄ─IDE╬╗×ķ’@ąįļŖŲĮŻ¼öUš╣ļĄ─IDE╬╗×ķļ[ą╬ļŖŲĮŻ¼ī”ė┌Ū░11╬╗IDŽÓ═¼Ą─ś╦£╩ļ║═öUš╣ļŻ¼ś╦£╩ļā׎╚╝ē▒╚öUš╣ļĖ▀ĪŻ
öĄō■Č╬
ę╗éĆöĄō■ļé„▌öĄ─öĄō■┴┐×ķ0~8éĆūų╣ØŻ¼▀@ĘNČ╠ļĮYśŗ╩╣Ą├CAN-busīŹĢrąį║▄Ė▀Ż¼ĘŪ│Ż▀m║ŽŲ¹▄ć║═╣ż┐žæ¬ė├ł÷║Ž╚ńłD27╦∙╩ŠĪŻ

öĄō■┴┐ąĪŻ¼░l╦═║═Įė╩šĢrķgČ╠Ż¼īŹĢrąįĖ▀Ż¼▒╗Ė╔ö_Ą─Ė┼┬╩ąĪŻ¼┐╣Ė╔ö_─▄┴”ÅŖĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū