
ųŪ─▄čŁ█Eīż█EÖC(j©®)Ų„╚╦ąĪ▄ć
╣żū„įŁ└Ē║åĮķŻ║
LM393ļSĢr▒╚▌^ų°ā╔┬Ę╣Ō├¶ļŖūĶĄ─┤¾ąĪŻ¼«ö(d©Īng)│÷¼F(xi©żn)▓╗ŲĮ║ŌĢrŻ©└²╚ńę╗é╚(c©©)ē║║┌╔½┼▄Ą└Ż®┴ó╝┤┐žųŲę╗é╚(c©©)ļŖÖC(j©®)═Ż▐D(zhu©Żn)Ż¼┴Ēę╗é╚(c©©)ļŖÖC(j©®)╝ė╦┘ą²▐D(zhu©Żn)Ż¼Å─Č°╩╣ąĪ▄ćą▐š²ĘĮŽ“Ż¼╗ųÅ═(f©┤)ĄĮš²┤_Ą─ĘĮŽ“╔ŽŻ¼š¹éĆ▀^│╠╩Ūę╗éĆķ]Łh(hu©ón)┐žųŲŻ¼ę“┤╦─▄┐ņ╦┘ņ`├¶Ąž┐žųŲĪŻ
▒Šų°Å─║åĄĮĘ▒Ą─įŁätŻ¼╬ęéā╩ūŽ╚üĒųŲū„ę╗┐Ņė╔öĄ(sh©┤)ūųļŖ┬ĘüĒ┐žųŲĄ─ųŪ─▄čŁ█EąĪ▄ćŻ¼į┌ĮMčb▀^│╠ųą╬ęéā▓╗Ą½─▄╩ņŽżÖC(j©®)ąĄįŁ└Ē▀Ć─▄ų▓ĮīW(xu©”)┴Ģ(x©¬)ĄĮŻ║╣ŌļŖé„ĖąŲ„ĪóļŖē║▒╚▌^Ų„ĪóļŖÖC(j©®)“ī(q©▒)äėļŖ┬ĘĄ╚ŽÓĻP(gu©Īn)ļŖūėų¬ūRĪŻ
Ž┬├µ╬ęéāŽ╚üĒ╩ņŽżę╗Ž┬╚²éĆų„ę¬Ų„╝■Ż║
╣Ō├¶ļŖūĶŲ„╝■
▀@Š═╩Ū╣Ō├¶ļŖūĶŻ¼╦³─▄ē“Öz£y═ŌĮń╣ŌŠĆĄ─ÅŖ(qi©óng)╚§Ż¼═ŌĮń╣ŌŠĆįĮÅŖ(qi©óng)╣Ō├¶ļŖūĶĄ─ūĶųĄįĮąĪŻ¼═ŌĮń╣ŌŠĆįĮ╚§ūĶųĄįĮ┤¾Ż¼«ö(d©Īng)╝t╔½LED╣Ō═Č╔õĄĮ░ū╔½ģ^(q©▒)ė“║═║┌╔½┼▄Ą└Ģrę“?y©żn)ķĘ┤╣Ō┬╩Ą─▓╗═¼Ż¼╣Ō├¶ļŖūĶĄ─ūĶųĄĢ■░l(f©Ī)╔·├„’@ģ^(q©▒)äeŻ¼▒Ńė┌║¾└m(x©┤)ļŖ┬Ę▀M(j©¼n)ąą┐žųŲĪŻ
LM393▒╚▌^Ų„╝»│╔ļŖ┬Ę
LM393╩Ūļp┬ĘļŖē║▒╚▌^Ų„╝»│╔ļŖ┬ĘŻ¼ė╔ā╔éƬÜ(d©▓)┴óĄ─Š½├▄ļŖē║▒╚▌^Ų„śŗ(g©░u)│╔ĪŻ╦³Ą─ū„ė├╩Ū▒╚▌^ā╔éĆ▌ö╚ļļŖē║Ż¼Ė∙ō■(j©┤)ā╔┬Ę▌ö╚ļļŖē║Ą─Ė▀Ą═Ė─ūā▌ö│÷ļŖē║Ą─Ė▀Ą═ĪŻ▌ö│÷ėąā╔ĘNĀŅæB(t©żi)Ż║ĮėĮ³ķ_┬Ę╗“š▀Ž┬└ŁĮėĮ³Ą═ļŖŲĮŻ¼LM393▓╔ė├╝»ļŖśOķ_┬Ę▌ö│÷Ż¼╦∙ęį▒žĒÜ╝ė╔Ž└ŁļŖūĶ▓┼─▄▌ö│÷Ė▀ļŖŲĮĪŻ
Ħ£p╦┘²X▌åĄ─ų▒┴„ļŖÖC(j©®)
ų▒┴„ļŖÖC(j©®)“ī(q©▒)äėąĪ▄ćĄ─įÆ▒žĒÜę¬£p╦┘Ż¼Ę±ät▐D(zhu©Żn)╦┘▀^Ė▀Ą─įÆąĪ▄ć┼▄Ą├╠½┐ņĖ∙▒Šę▓üĒ▓╗╝░┐žųŲŻ¼Č°Ūę╬┤Įø(j©®ng)£p╦┘Ą─įÆ▐D(zhu©Żn)Šž╠½ąĪ╔§ų┴┼▄▓╗ŲüĒŻ¼╬ęéāīŻķTČ©ū÷Ą─▀@ĘNļŖÖC(j©®)ęčĮø(j©®ng)╝»│╔┴╦£p╦┘²X▌å┤¾┤¾ĮĄĄ═┴╦ųŲū„ļyČ╚ĘŪ│Ż▀m║Ž╬ęéā╩╣ė├ĪŻ
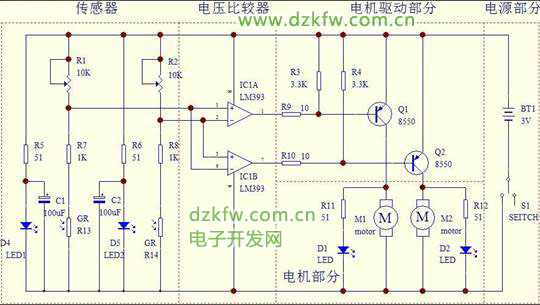
╩ūŽ╚╬ęéāüĒ╩ņŽżę╗Ž┬š¹ÖC(j©®)Ą─╣żū„įŁ└ĒłDŻ¼LM393ļSĢr▒╚▌^ų°ā╔┬Ę╣Ō├¶ļŖūĶĄ─┤¾ąĪŻ¼«ö(d©Īng)│÷¼F(xi©żn)▓╗ŲĮ║ŌĢrŻ©└²╚ńę╗é╚(c©©)ē║║┌╔½┼▄Ą└Ż®┴ó╝┤┐žųŲę╗é╚(c©©)ļŖÖC(j©®)═Ż▐D(zhu©Żn)Ż¼┴Ēę╗é╚(c©©)ļŖÖC(j©®)╝ė╦┘ą²▐D(zhu©Żn)Ż¼Å─Č°╩╣ąĪ▄ćą▐š²ĘĮŽ“Ż¼╗ųÅ═(f©┤)ĄĮš²┤_Ą─ĘĮŽ“╔ŽŻ¼š¹éĆ▀^│╠╩Ūę╗éĆķ]Łh(hu©ón)┐žųŲŻ¼ę“┤╦─▄┐ņ╦┘ņ`├¶Ąž┐žųŲĪŻ
╣Ō├¶ļŖūĶŲ„╝■
▀@Š═╩Ū╣Ō├¶ļŖūĶŻ¼╦³─▄ē“Öz£y═ŌĮń╣ŌŠĆĄ─ÅŖ(qi©óng)╚§Ż¼═ŌĮń╣ŌŠĆįĮÅŖ(qi©óng)╣Ō├¶ļŖūĶĄ─ūĶųĄįĮąĪŻ¼═ŌĮń╣ŌŠĆįĮ╚§ūĶųĄįĮ┤¾Ż¼«ö(d©Īng)╝t╔½LED╣Ō═Č╔õĄĮ░ū╔½ģ^(q©▒)ė“║═║┌╔½┼▄Ą└Ģrę“?y©żn)ķĘ┤╣Ō┬╩Ą─▓╗═¼Ż¼╣Ō├¶ļŖūĶĄ─ūĶųĄĢ■░l(f©Ī)╔·├„’@ģ^(q©▒)äeŻ¼▒Ńė┌║¾└m(x©┤)ļŖ┬Ę▀M(j©¼n)ąą┐žųŲĪŻ
LM393▒╚▌^Ų„╝»│╔ļŖ┬Ę
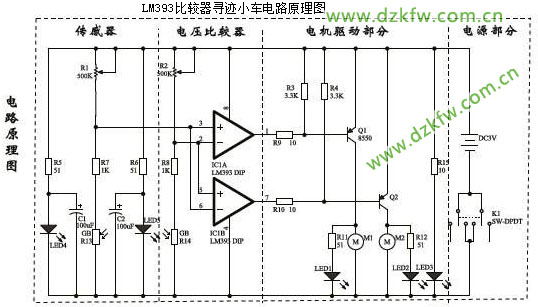
LM393╩Ūļp┬ĘļŖē║▒╚▌^Ų„╝»│╔ļŖ┬ĘŻ¼ė╔ā╔éƬÜ(d©▓)┴óĄ─Š½├▄ļŖē║▒╚▌^Ų„śŗ(g©░u)│╔ĪŻ╦³Ą─ū„ė├╩Ū▒╚▌^ā╔éĆ▌ö╚ļļŖē║Ż¼Ė∙ō■(j©┤)ā╔┬Ę▌ö╚ļļŖē║Ą─Ė▀Ą═Ė─ūā▌ö│÷ļŖē║Ą─Ė▀Ą═ĪŻ▌ö│÷ėąā╔ĘNĀŅæB(t©żi)Ż║ĮėĮ³ķ_┬Ę╗“š▀Ž┬└ŁĮėĮ³Ą═ļŖŲĮŻ¼LM393▓╔ė├╝»ļŖśOķ_┬Ę▌ö│÷Ż¼╦∙ęį▒žĒÜ╝ė╔Ž└ŁļŖūĶ▓┼─▄▌ö│÷Ė▀ļŖŲĮĪŻ
Ħ£p╦┘²X▌åĄ─ų▒┴„ļŖÖC(j©®)
ų▒┴„ļŖÖC(j©®)“ī(q©▒)äėąĪ▄ćĄ─įÆ▒žĒÜę¬£p╦┘Ż¼Ę±ät▐D(zhu©Żn)╦┘▀^Ė▀Ą─įÆąĪ▄ć┼▄Ą├╠½┐ņĖ∙▒Šę▓üĒ▓╗╝░┐žųŲŻ¼Č°Ūę╬┤Įø(j©®ng)£p╦┘Ą─įÆ▐D(zhu©Żn)Šž╠½ąĪ╔§ų┴┼▄▓╗ŲüĒŻ¼╬ęéāīŻķTČ©ū÷Ą─▀@ĘNļŖÖC(j©®)ęčĮø(j©®ng)╝»│╔┴╦£p╦┘²X▌å┤¾┤¾ĮĄĄ═┴╦ųŲū„ļyČ╚ĘŪ│Ż▀m║Ž╬ęéā╩╣ė├ĪŻ
LM393ļSĢr▒╚▌^ų°ā╔┬Ę╣Ō├¶ļŖūĶĄ─┤¾ąĪŻ¼«ö(d©Īng)│÷¼F(xi©żn)▓╗ŲĮ║ŌĢrŻ©└²╚ńę╗é╚(c©©)ē║║┌╔½┼▄Ą└Ż®┴ó╝┤┐žųŲę╗é╚(c©©)ļŖÖC(j©®)═Ż▐D(zhu©Żn)Ż¼┴Ēę╗é╚(c©©)ļŖÖC(j©®)╝ė╦┘ą²▐D(zhu©Żn)Ż¼Å─Č°╩╣ąĪ▄ćą▐š²ĘĮŽ“Ż¼╗ųÅ═(f©┤)ĄĮš²┤_Ą─ĘĮŽ“╔ŽŻ¼š¹éĆ▀^│╠╩Ūę╗éĆķ]Łh(hu©ón)┐žųŲŻ¼ę“┤╦─▄┐ņ╦┘ņ`├¶Ąž┐žųŲĪŻ
ĮMčb▓Į¾EŻ║
Ą┌ę╗▓ĮŻ║ļŖ┬Ę▓┐Ęų╗∙▒Š║ĖĮė
ļŖ┬Ę║ĖĮė▓┐Ęų▒╚▌^║åå╬Ż¼║ĖĮėĒśą“░┤ššį¬╝■Ė▀Č╚Å─Ą═ĄĮĖ▀Ą─įŁätŻ¼╩ūŽ╚║ĖĮė8éĆļŖūĶŻ¼║ĖĮėĢräš(w©┤)▒žė├╚fė├▒Ē┤_šJ(r©©n)ūĶųĄ╩Ūʱš²┤_Ż¼║ĖĮėėąśOąįĄ─į¬╝■╚ń╚²śO╣▄ĪóŠG╔½ųĖ╩Š¤¶ĪóļŖĮŌļŖ╚▌äš(w©┤)▒žĘųŪÕ│■śOąį▒M┴┐ģó┐╝╬ęéāłDŲ¼Ą─į¬╝■ĘĮŽ“║ĖĮėŻ¼║ĖĮėļŖ╚▌Ģrę²─_Č╠Ą─╩Ūžō(f©┤)śO▓Õ╚ļPCBĮzėĪ╔ŽĻÄė░Ą─ę╗é╚(c©©)Ż¼║ĖĮėŠG╔½LEDĢrūóęŌę²─_ķLĄ─╩Ūš²śOŻ¼▓óŪę║ĖĮėĢrķg▓╗─▄╠½ķLʱät╚▌ęū║Ėē─Ż¼D4 D5 R13 R14 ┐╔ęįĢ║Ģr▓╗║ĖŻ¼╝»│╔ļŖ┬ĘąŠŲ¼┐╔ęį▓╗▓ÕŻ¼│§▓Į║ĖĮė═Ļ│╔║¾šłäš(w©┤)▒ž╝Ü(x©¼)ą─║╦ī”Ż¼Ę└ų╣┤ųą─┤¾ęŌĪŻ
Ą┌Č■▓ĮŻ║ÖC(j©®)ąĄĮMčb
īó╚fŽ“▌å┬▌Įz┤®╚ļPCB┐ūųąŻ¼▓óą²╚ļ╚fŽ“▌å┬▌─Ė║═╚fŽ“▌åĪŻļŖ│ž║ą═©▀^ļp├µ─z┘Nį┌PCB╔ŽŻ¼ę²│÷ŠĆ┤®▀^PCBŅA(y©┤)┴¶┐ū║ĖĮėĄĮPCB╔ŽŻ¼╝tŠĆĮė3Vš²ļŖį┤Ż¼³SŠĆĮėĄžŻ¼ČÓėÓĄ─ę²ŠĆ┐╔ęįė├ė┌ļŖÖC(j©®)▀BŠĆĪŻ
ÖC(j©®)ąĄ▓┐ĘųĮMčb┐╔ęįŽ╚ĮMčb▌åūėŻ¼▌åūėė╔╚²Ų¼║┌╔½üå┐╦┴”▌åŲ¼ĮM│╔Ż¼čb┼õŪ░šłīó▒Żūo(h©┤)─żĮę╚źŻ¼ūŅā╚(n©©i)é╚(c©©)Ą─▌åŲ¼ųąą─┐ū╩ŪķLł@┐ūŻ¼ųąķgĄ─▌åŲ¼ų▒ÅĮ▒╚▌^ąĪŻ¼═Ōé╚(c©©)Ą─▌åŲ¼ųąą─┐ū╩Ūł@Ą─Ż¼ė├ā╔éĆ┬▌Įz┬▌─Ė╣╠Č©║├╚²Ų¼▌åŲ¼Ż¼▓óė├║┌╔½Ą─ūį╣ź┬▌Įz╣╠Č©į┌ļŖÖC(j©®)Ą─▐D(zhu©Żn)▌S╔ŽŻ¼ūŅ║¾īó╣Ķ─z▌å╠ź╠ūį┌▄ć▌å╔ŽĪŻė├ę²ŠĆ▀BĮė║├ļŖÖC(j©®)ę²ŠĆŻ¼ūŅ║¾īó▄ć▌åĮM╝■ė├▓╗Ė╔─zš│┘Nį┌PCBųŲČ©╬╗ų├Ż¼ūóęŌ▄ć▌å║═PCB▀ģŠē▒Ż│ųūŃē“Ą─ķgŽČŻ¼īóļŖÖC(j©®)ę²ŠĆ║ĖĮėĄĮPCB╔ŽŻ¼ūóęŌę²ŠĆ▀m«ö(d©Īng)┴¶ķLę╗ą®Ż¼Ę└ų╣ļŖÖC(j©®)ą²▐D(zhu©Żn)ĘĮŽ“Õeš`║¾▒Ńė┌š{(di©żo)ōQę²ŠĆĄ─Ēśą“ĪŻ
Ą┌╚²▓ĮŻ║░▓čb╣ŌļŖ╗ž┬Ę
╣Ō├¶ļŖūĶ║═░l(f©Ī)╣ŌČ■śO╣▄Ż©ūóęŌśOąįŻ®╩ŪĘ┤Ž“░▓čbį┌PCB╔ŽĄ─Ż¼║═Ąž├µķgŠÓ╝s5║┴├ūū¾ėęŻ¼╣Ō├¶ļŖūĶ║═░l(f©Ī)╣ŌČ■śO╣▄ų«ķgŠÓļxę▓į┌5║┴├ūū¾ėęĪŻūŅ║¾┐╔ęį═©ļŖ£yįć.
Ą┌╦─▓ĮŻ║š¹▄ćš{(di©żo)įć
į┌ļŖ│ž║ąā╚(n©©i)čb╚ļ2╣Ø(ji©”)AAļŖ│žŻ¼ķ_ĻP(gu©Īn)ō▄į┌Ī░ONĪ▒╬╗ų├╔ŽŻ¼ąĪ▄ćš²┤_Ą─ąą±éĘ┤ŽÓ╩Ūčž╚fŽ“▌åĘĮŽ“ąą±éŻ¼╚ń╣¹░┤ūĪū¾▀ģĄ─╣Ō├¶ļŖūĶŻ¼ąĪ▄ćĄ─ėęé╚(c©©)Ą─▄ć▌åæ¬(y©®ng)įō▐D(zhu©Żn)äėŻ¼░┤ūĪėę▀ģĄ─╣Ō├¶ļŖūĶŻ¼ąĪ▄ćĄ─ū¾é╚(c©©)Ą─▄ć▌åæ¬(y©®ng)įō▐D(zhu©Żn)äėŻ¼╚ń╣¹ąĪ▄ć║¾═╦ąą±é┐╔ęį═¼ĢrĮ╗ōQā╔éĆļŖÖC(j©®)Ą─ĮėŠĆŻ¼╚ń╣¹ę╗é╚(c©©)š²│Ż┴Ēę╗é╚(c©©)║¾═╦Ż¼ų╗ę¬Į╗ōQ║¾═╦ę╗é╚(c©©)ļŖÖC(j©®)ĮėŠĆ╝┤┐╔ĪŻ
ūóęŌ╩┬ĒŚ(xi©żng)Ż║
ĮMčbšf├„Ģ°Ą─▒│├µŠ═╩ŪčŁ█EąĪ▄ćĄ─║åęū┼▄Ą└Ż¼┐═æ¶ę▓┐╔ęįų▒Įėė├1.5Ī½2.0└Õ├ū║┌╔½Ą─ļŖ╣ż─zĦų▒Įėš│┘Nį┌Ąž├µ╔ŽįO(sh©©)ėŗ(j©¼)│╔Å═(f©┤)ļsĄ─┼▄Ą└Š═Ė³║├═µ┴╦ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū