
機械臂控制實驗
實驗一 機械臂控制實驗
一、實驗目的
1.了解機械臂的組成及性能指標;
2.了解機械臂的機械系統和控制系統的組成、工作原理;
3.了解機械臂完成搬運裝配作業的過程,掌握機械臂示教作業的方法。
二、實驗設備
四自由度機械臂及控制柜,計算機,氣泵,裝配軸、套。
三、實驗原理
本實驗使用的四自由度示教再現式機械臂采用串聯平面式開鏈結構。機械臂各關節采用伺服電機和步進電機混合驅動,并通過Windows 環境下的軟件編程和運動控制卡實現對機械臂的控制,使機械臂能夠在運動范圍內任意位置精確定位。
機械臂的示教、再現是示教再現型機械臂實現機械臂作業的兩個過程。在示教過程中,操作者通過示教盒或計算機屏幕上的示教界面操作機械臂運動,計算機系統內安裝的示教軟件將機械臂運動軌跡各段的起點和終點、運動類型、運動速度等信息自動地記錄在計算機存儲器中;在再現過程中,重放存儲器中存儲的各段軌跡的運動類型和運動速度,并通過插補算法計算出各段軌跡的起點和終點中間的各個位置點,作為電機伺服系統的指令,從而再現示教過的作業程序。如需更改作業程序時,則需重新完成示教和再現的操作。
機械臂按運動軌跡控制方式可分為點到點(PTP)運動控制和連續軌跡(CP)運動控制。
四、實驗內容
1.機械臂的機械系統認識
本機械臂具有4個自由度,即腰關節(關節1)、臂關節(關節2)、肘關節(關節3)、腕關節(關節4)各自的回轉運動。
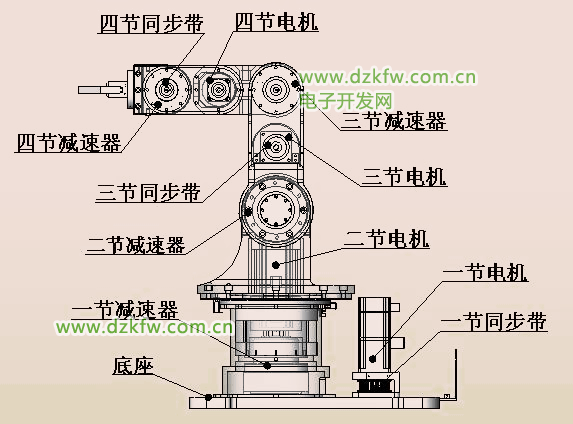
圖1-1 機械臂的傳動簡圖
機械臂的夾持功能是通過安裝在手腕前端的手爪來完成的。本機械臂采用氣動手爪機構來完成抓取作業,手爪的標稱負載為2kg。機械臂的氣動夾持裝置由氣泵、油水分離器、控制閥、手爪及氣管五部分組成。
2.機械臂的控制系統認識
本機械臂的電控系統主要由計算機系統、電機及電機驅動器、傳感器、電源、操作電路、控制柜等部分組成。
3.機械臂搬運裝配實驗
機械臂的搬運裝配分成示教、再現兩個過程。機械臂的示教窗口包含關節信息、末端坐標信息、示教盒、機械臂狀態信息、示教點信息列表、示教速度控制和示教控制等部分。
五、實驗步驟
1.介紹機械臂的性能指標及機械系統的各組成部分(教師演示);
2.介紹機械臂的電控系統各組成部分(教師演示);
3.機械臂搬運裝配實驗
1)連接好控制柜電源,開啟計算機后,旋轉控制柜上鑰匙以開啟電源開關,等待控制柜的報警指示燈變灰后,按下控制柜的“伺服開啟”按鈕,等待變綠后方可操作。
2)運行機械臂教學軟件,進入軟件主界面,點擊“機械臂復位”按鈕,復位后點擊“機械臂示教”按鈕,彈出示教窗口。
3)在“示教速度控制”內,通過移動指針選擇示教速度。
4)在“示教盒”內,通過控制各關節的運動方向、手爪狀態等按鈕來控制機械臂示教運動。當每個關節運動到關鍵位置處,需按下“記錄”按鈕記錄下示教信息,直至整個搬運裝配過程完成。
5)點擊“保存”按鈕,保存示教文件。
6)點擊“復位”按鈕,機械臂回到笛卡爾坐標系的原點位置。
7)點擊“再現”按鈕,機械臂按照記錄的機械臂關節信息再現一遍運動軌跡。
8)點擊“清零”按鈕,清除關節信息、末端點信息和示教信息列表。
9)點擊“復位”按鈕,機械臂做回零運動。
10)如果想再現第二次,只需點擊“打開”按鈕,找到相應示教文件,然后點擊“識別示教點”,重復6)、7)、
8)、9) 步驟即可。
11)關閉教學機械臂軟件。按下教學機械臂控制柜的“伺服關閉”按鈕,等待變紅后,旋轉控制柜上鑰匙,關閉電源開關。
六、思考題
1.指出機械臂各關節所采用的執行元件和傳動部件。
2.怎么控制氣動手爪的夾持力?怎樣調節氣動手爪的移動速度?
3.通過本實驗總結機械臂示教-再現的概念。
4.機械臂在運動控制過程中,梯形曲線運動和S形曲線運動模式各有什么特點?
5.機械臂的PTP運動控制與CP運動控制方式各有何特點?舉出機械臂在工業控制中PTP控制和CP控制的實例?
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底