
機械臂的結構設計
機械臂的結構設計是機器人學中的一個關鍵領域,它涉及確定機械臂各個部分的幾何形狀、尺寸、材料和連接方式,以實現所需的運動性能和功能。機械臂的結構設計需要考慮多種因素,包括機械臂的工作環境、負載能力、運動范圍、精度要求等。
基本概念
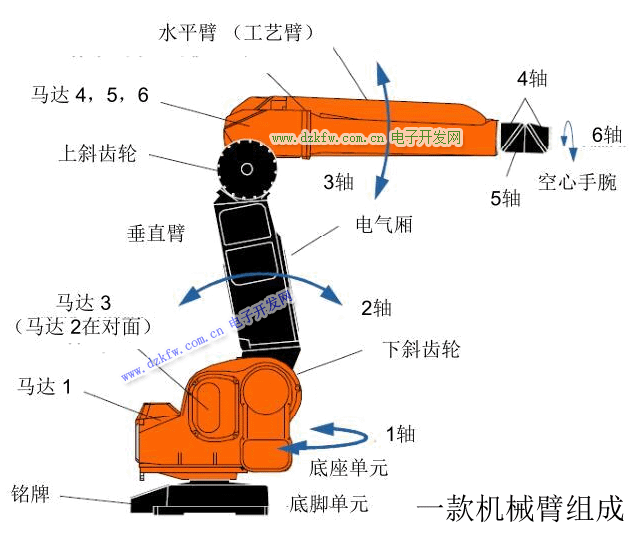
- 機械臂的組成:
- 機械臂通常由以下部分組成:基座(base)、臂桿(links)、關節(joints)、末端執行器(end-effector)和驅動器(actuators)。
- 基座是機械臂的固定部分,通常位于工作臺的頂部或墻壁上。
- 臂桿是連接基座和末端執行器的多個剛性或柔性部件。
- 關節是連接臂桿的旋轉或滑動部件,允許機械臂在不同方向上移動。
- 末端執行器是機械臂的末端,用于執行各種任務,如抓取、裝配、焊接等。
- 驅動器是用于驅動關節運動的裝置,如電機、液壓缸等。
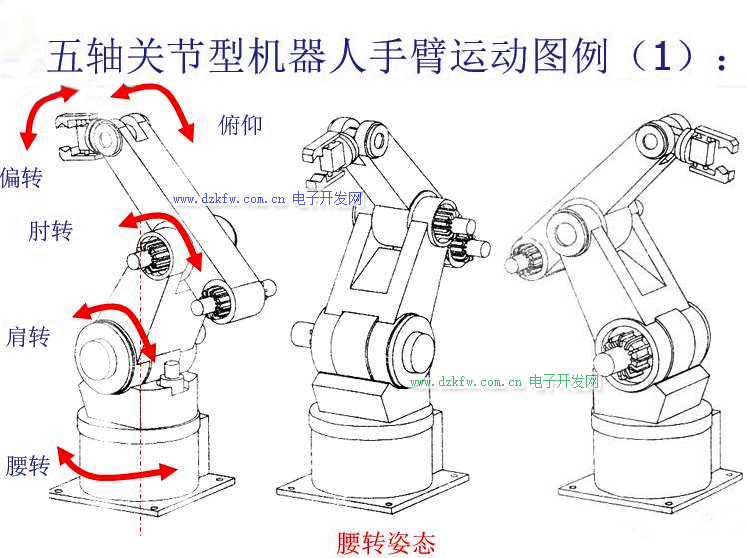
- 機械臂的運動學:
- 機械臂的運動學涉及計算機械臂的各個關節如何移動以使末端執行器達到特定的位置和姿態。
- 運動學分為正運動學和逆運動學,正運動學計算末端執行器的位置和姿態,而逆運動學計算關節狀態。
設計原則
- 工作環境適應性:
- 機械臂的結構設計需要考慮工作環境的特點,如溫度、濕度、灰塵、振動等。
- 機械臂的結構需要能夠適應不同的工作環境,以保證其穩定性和可靠性。
- 負載能力:
- 機械臂的結構設計需要考慮其負載能力,確保機械臂在執行任務時能夠承受所需的負載。
- 機械臂的結構需要具有足夠的強度和剛度,以承受工作過程中的力和力矩。
- 運動范圍和精度:
- 機械臂的結構設計需要考慮其運動范圍和精度要求,確保機械臂能夠覆蓋所需的工作空間,并達到所需的定位精度。
- 機械臂的結構需要具有足夠的靈活性和剛度,以滿足不同任務的需求。
- 維護和操作便利性:
- 機械臂的結構設計需要考慮維護和操作的便利性,確保機械臂的各個部分易于拆卸、更換和調整。
- 機械臂的結構需要具有合理的布局和緊湊的設計,以方便操作人員的操作和維護。
設計步驟
- 需求分析:
- 確定機械臂的工作任務和性能要求,包括負載能力、運動范圍、精度要求等。
- 分析工作環境的特點,確定機械臂的結構設計需要考慮的因素。
- 概念設計:
- 提出多個機械臂結構設計方案,包括不同的臂桿布局、關節類型和驅動方式等。
- 對各個設計方案進行比較和評估,選擇最優的設計方案。
- 詳細設計:
- 根據概念設計方案,確定機械臂各個部分的具體尺寸、材料和連接方式。
- 進行結構分析和計算,確保機械臂的結構設計滿足強度、剛度和運動學要求。
- 原型制造和測試:
- 制造機械臂的原型,并進行實際操作和測試。
- 根據測試結果對機械臂的結構設計進行調整和優化。
關節模塊
機器人中關節模塊是最為重要的硬件之一,其能驅動連桿進行運動從而實現機器人在任務空間中的作業。關節模塊一般分為:電機、減速器、編碼器、抱閘、驅動器。
- 電機:關節電機。
- 減速器:提高電機的輸出力矩,同時提高電機的位置控制精度。
- 編碼器:為電機的位置、速度提供基本信息反饋。
- 抱閘:實現斷電自鎖。
- 驅動器:對關節電機實現位置、速度以及電流的閉環控制。
2.
關節模塊是機械臂中的關鍵組成部分,它負責連接機械臂的不同臂段,并允許臂段在一定范圍內進行旋轉或線性移動。關節模塊的設計和性能直接影響到機械臂的運動范圍、靈活性、精度和負載能力。
基本概念
- 關節類型:
- 旋轉關節:允許機械臂在一定范圍內旋轉,如球關節、旋轉關節、旋轉關節等。
- 線性關節:允許機械臂在一定范圍內線性移動,如滑塊關節、直線電機等。
- 關節自由度:
- 關節自由度是指關節能夠移動的方向數,如旋轉關節通常有兩個自由度(繞x軸和y軸旋轉),線性關節通常有一個自由度(沿z軸移動)。
- 關節參數:
- 關節參數是指描述關節運動特性的數值,如關節的行程、轉速、扭矩等。
- 關節驅動器:
- 關節驅動器是用于驅動關節運動的裝置,如電機、液壓缸等。
關節電機是機械臂關節模塊中的關鍵驅動組件,它負責為機械臂的各個關節提供動力,使其能夠按照預定的軌跡和速度進行運動。關節電機的設計和性能直接影響到機械臂的靈活性、精度和響應速度。
基本概念
- 類型:
- 直流電機:常用于小型和中等負載的機械臂,具有較好的控制精度和響應速度。
- 交流電機:適用于大型和重型機械臂,具有較高的扭矩和功率。
- 步進電機:通常用于精度要求較高的應用,能夠提供精確的位置控制。
- 伺服電機:結合了直流電機和步進電機的優點,能夠提供精確的速度和位置控制。
- 控制方式:
- 開環控制:電機直接根據輸入信號工作,不進行反饋調整。
- 閉環控制:電機的工作狀態通過傳感器進行實時反饋,根據反饋信息調整電機的工作。
- 接口:
- 關節電機通常通過電機驅動器與控制系統連接,驅動器負責電機的電流控制和速度調節。
設計原則
- 負載能力:
- 關節電機的選擇需要考慮機械臂的負載能力,確保電機能夠承受所需的力和力矩。
- 精度和響應速度:
- 關節電機的選擇需要考慮其精度和響應速度,確保電機能夠在不同位置和姿態下實現精確的定位和快速響應。
- 可靠性和維護性:
- 關節電機的選擇需要考慮其可靠性和維護性,確保電機在長時間運行和惡劣工作環境中能夠保持穩定性和可靠性,并易于進行維護和更換。
結論
機械臂的結構設計是機器人學中的一個關鍵領域,它涉及到確定機械臂各個部分的幾何形狀、尺寸、材料和連接方式,以實現所需的運動性能和功能。通過合理的設計,可以確保機械臂能夠適應工作環境、承受負載、覆蓋所需的工作空間,并達到所需的定位精度。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底