
關鍵字:機器人
在日常生活和學習中充斥著高新技術的今天,“低技術”表達的是回歸自然和傳統,去挖掘人類早已擁有的聰明才智。低技術不要求我們一味地追求技術的尖端化,但其所展現的科技成果和科學理念同樣精彩。本文將通過一部尋光機器人的制作,向大家展示低技術的魅力。
一、低技術機器人
尋光機器人,相信很多機器人愛好者都曾經研究和實際制作過。常見的設計思路是采用一對光電傳感器檢測環境光,傳感器的輸出信號送入單片機I/O口,或者AD口(進行AD變換,視傳感器輸出信號而定),經過程序算法,電機驅動電路來驅動一對減速電機或者步進電機做差速運轉,帶動機器人向著光線強的位置運動。這類解決方案,從機器人電子部分的造價來看,現在市場上機器人專用光電傳感器大概在20元一只;單片機,常見的51、AVR、PIC在5~10元,與之配套的PCB工程板在50元左右;雙電機驅動芯片L293、L298在8元左右;此外還有單片機編程所需的配套軟件,下載燒錄硬件等。
那么,用低技術的設計思路來制作一個尋光機器人,可以把電路簡化到什么程度呢?它的造價又可以做到多低呢?答案是只需要三個元件:一片NE555和一對光敏電阻。這個低技術機器人的電子部分,造價將小于1元。NE555尋光機器人的線路如圖1所示。它是由GrantM在2001年設計的。
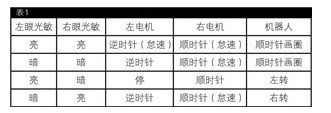
從圖1中可以看出,NE555工作在雙穩態,第2腳和6腳連接在一起構成施密特觸發器模式。光敏電阻構成機器人的虛擬視野,用來檢測機器人前方的環境光。機器人的左眼與右減速電機、右眼與左減速電機,是彼此協同工作的,根據雙眼檢測到的環境光線的差異,由NE555驅動兩只電機做差速運轉,驅動小車向著光線的方向前進。從電路的角度來看,非常簡單,但是其實質上是一部可以移動的模擬計算機,光敏電阻是這部計算機的輸入設備,電機是輸出設備。注意機器人在物理結構上對兩個光敏電阻和減速電機的安裝位置有嚴格要求,圖1中所示的左右方位是從車尾向車頭看的,還需要注意兩只電機的極性不可接反,否則會出現機器人運轉紊亂的現象。
表1歸納了機器人在不同環境光下的運動特性。,受光敏電阻夾角位置,元件電氣對稱性,環境光的變化,電機和車體的結構的影響,實際機器人的運動方式非常復雜。筆者制作的這只機器人,放在中廳會尋著光線自己跑到陽臺,在陽光下是做一種不規則的8字轉動;在無光的環境下做順時針轉動。最奇妙的是,因為我使用了高靈敏度快速響應的光敏元件,這部機器人甚至可以“感覺”到墻壁的反光,對墻壁,衣柜,桌子腿這些淺色高反光物體表現出一種避障特性(靠近墻壁會自己拐彎)。下面是我制作NE555尋光機器人的過程。
二、制作尋光機器人
業余制作機器人是一件非常有趣的事情,愛好者不光要處理好電路的問題,還要解決機械結構的問題。而制作一部個性十足的移動式機器人的底盤,就需要好好動一番腦筋了。
制作這個底盤的原則是在滿足功能的前提下,結構盡量簡單,同時兼顧一點藝術性。

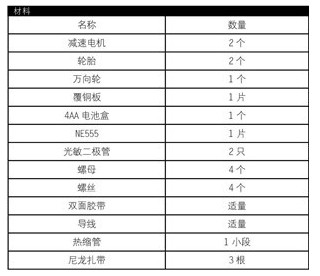
從圖2中可以看到,這部機器人移動平臺使用的是最常見,最普通的材料。輪胎、減速電機和萬向輪是入門級小車機器人的標準配置,在網上可以很容易買到。車體使用一片覆銅板邊角料加工而成。為了簡化結構,替換方便,電機和電池盒使用雙面膠帶粘接的方式與車體固定。NE555選用常見的8腳雙列直插式封裝,方便焊接。光敏電阻沒有特殊要求,可以使用能買到的任意規格的光敏元件,有的LED二極管也呈現出光敏特性,也可以直接拿來用。我使用的是一對直徑5mm的紅外線接收管,反相串聯在+6V電源與地之間。紅外線二極管的好處是適應光線范圍大,響應時間比光敏電阻快,在陽光、燈光甚至家電遙控器下都可以靈敏的動作。

我使用一片厚度1.5mm的單面環氧樹脂覆銅板作為機器人的主體結構(見圖3)。覆銅板質輕,而且有著很好的強度和韌性,也很容易加工。銅皮一面作為機器人的頂部兼電源地,這樣有兩個好處:一是可以在銅皮面上迅速的搭建起機器人的電子部分;二是美觀,黃銅的顏色使這部機器人看起來別具一格。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底