
目 錄
超聲波是一種振動(dòng)頻率超過(guò)20kHz的機(jī)械波,沿直線方向傳播,傳播方向性好,傳播距離也較遠(yuǎn),在介質(zhì)中傳播時(shí)遇到障礙物就會(huì)產(chǎn)生反射波。此外,模塊本身體積小,易于在任何機(jī)器人項(xiàng)目中使用,并提供2厘米至400厘米(約1英寸至13英尺)之間出色的非接觸范圍檢測(cè),精度為3mm。工作電壓為5伏。由于超聲波的以上特點(diǎn),因此被廣泛地應(yīng)用于物體距離的測(cè)量中。
HC-SR04一款設(shè)計(jì)有超聲波發(fā)射探頭、接收探頭、信號(hào)放大集成電路等超聲波模塊模塊共四個(gè)引腳,VCC為5V供電,Trig為觸發(fā)信號(hào)輸入,Echo為回響信號(hào)輸出,GND為電源地。
實(shí)現(xiàn)功能
在扔垃圾之前,用手或其他障礙物放在超聲波傳感器之前,當(dāng)距離15cm時(shí),舵機(jī)轉(zhuǎn)動(dòng),實(shí)現(xiàn)蓋子翻起。指示燈亮,蜂鳴器發(fā)生。在10秒后,舵機(jī)回到原位,蓋子蓋上。

圖1 HC-SR04超聲波測(cè)距模塊
| VCC | HC-SR04電源接口,接Arduino上的5V引腳 |
| Trig (Trigger) | 向外界觸發(fā)超聲波脈沖,接引腳12 |
| Echo | 回響信號(hào)輸出。當(dāng)接收到反射信號(hào)時(shí),引腳產(chǎn)生一個(gè)脈沖。脈沖的長(zhǎng)度與檢測(cè)發(fā)射信號(hào)所需的時(shí)間成正比,接引腳11 |
| GND | HC-SR04接地引腳,接Arduino GND |
工作原理
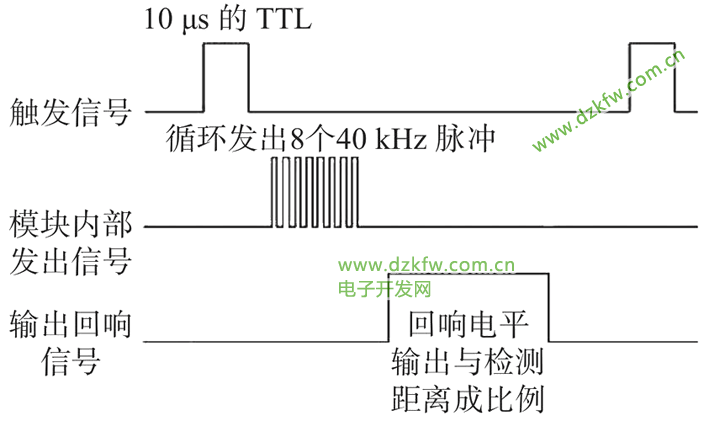
圖2 HC-SR04超聲波測(cè)距時(shí)序圖
Arduino給超聲波模塊Trig引腳10μs以上的脈沖觸發(fā)信號(hào),模塊內(nèi)部自動(dòng)發(fā)送8個(gè)40kHz的聲音脈沖,一旦檢測(cè)到反射信號(hào),即輸出回響信號(hào)(Echo引腳)使設(shè)備的“超聲特征”變得獨(dú)一無(wú)二,從而使接收器能夠?qū)l(fā)射模式與環(huán)境超聲噪聲區(qū)分開(kāi),回響信號(hào)脈沖寬度與被測(cè)距離成正比。如果這些脈沖沒(méi)有被反射回來(lái),則回波信號(hào)將在38毫秒(38毫秒)后超時(shí)并返回低電平。
電路連接
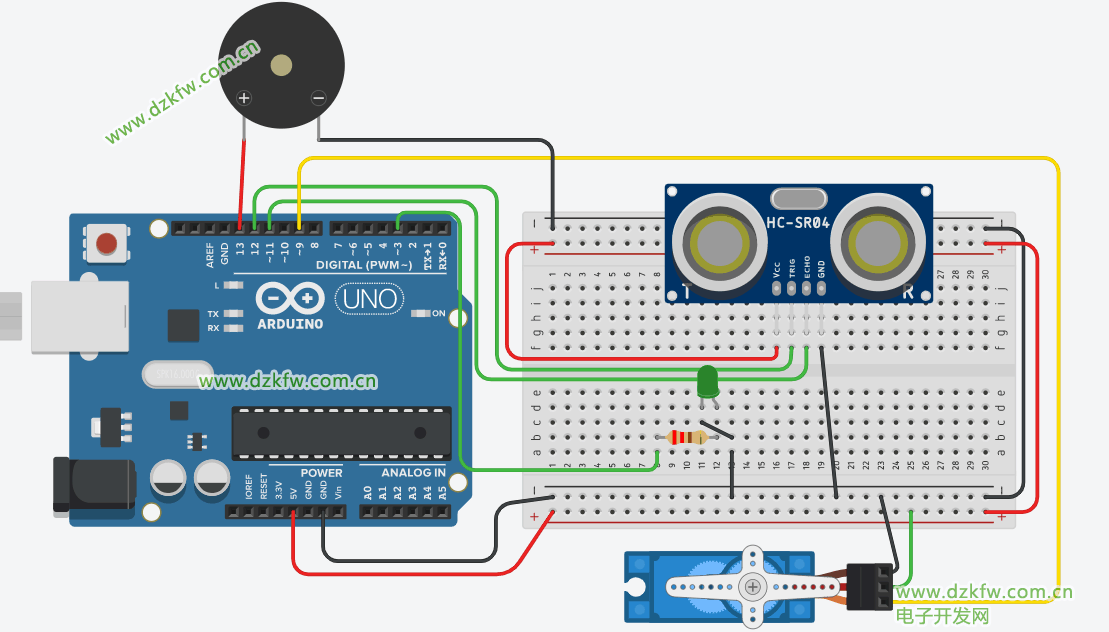
圖3 電路連接
控制代碼
#include <Servo.h>
Servo myservo;
int trig=12;
int echo=11;
int led13=13;
int led3=3;
void setup(){
myservo.attach(9);
Serial.begin(9600);
pinMode(echo,INPUT);
pinMode(trig,OUTPUT);
pinMode(led13,OUTPUT);
pinMode(led3,OUTPUT);
}
void loop(){
myservo.write(0);
long val=0;
digitalWrite(trig,HIGH);
delayMicroseconds(15);
digitalWrite(trig,LOW);
val=pulseIn(echo,HIGH);
float S=val/58.00;
if(S<15){
myservo.write(100);
digitalWrite(led13,HIGH);
digitalWrite(led3,HIGH);
}
delay(10000);
S=0;
digitalWrite(led13,LOW);
digitalWrite(led3,LOW);
}
 返回頂部
返回頂部 刷新頁(yè)面
刷新頁(yè)面 下到頁(yè)底
下到頁(yè)底