
醫藥、食品行業有許多需要進行裝罐的工作,例如,膠囊或者藥丸顆粒的裝瓶、顆粒狀食物的裝瓶或者裝盒等。傳統的加工方法是采用人工操作,效率很低,又容易產生顆粒數目差錯,而且工人勞動強度過大、不衛生。
自動數粒機控制系統,在制藥廠、食品廠等要求定粒數包裝的行業非常流行。以100粒一小瓶包裝為例,使用數粒機來確定藥丸粒數非常方便。數粒機結構非常簡單,但編程的算法是非常重要的,否則很難達到較高的控制精度。由于PLC具有功能齊全、應用靈活、維護容易、穩定可靠等特點,應用于數粒機時既方便又快捷,所以在自動數粒機控制中得到了廣泛的應用。本節將介紹如何采用PLC來實現顆粒的自動灌裝。
一、 系統概述
如圖11-16所示,自動數粒機由機架、傳輸機構、下料機構、供料機構和控制器等部分組成。自動數粒機的傳送帶由傳輸電動機拖動,用于傳送將要灌裝的容器。下料機構包括下料電動機、下料盤、下料道和出料口。下料盤由下料電動機拖動,將下料盤上的待裝物送到下料道,再經過料口裝入容器中。供料機構是用于向下料盤提供裝物品的機構,它由螺桿供料器和儲料箱組成。自動數粒機有3個傳感器,一個是容器傳感器,用來檢測傳送帶上是否有容器;另一個是下料傳感器,用來檢測下料盤的每一等份的袋裝物品是否全部掉入下料道,這里選用檢測距離為10mm的接近開關作為下料傳感器;最后一個是料位傳感器,用于檢測下料盤是否需要供料,這里采用雙位控制開關作為料位傳感器,安裝在下料盤中。
圖11-16 自動數粒機的結構簡圖
自動數粒機的工作過程可簡單描述如下:自動數粒機啟動后,傳輸電動機運行,傳送帶將待灌裝的容器送到出料口,在出料口的左右兩側裝有兩個汽缸,一個是進容器汽缸,另一個是擋容器汽缸,當進容器汽缸縮回而擋容器汽缸伸出時,傳送帶將容器送到出料口,然后進容器汽缸再伸出,將位于出料口的容器鎖定位置,為灌裝做好準備。容器到位后,下料電動機啟動運行,帶動下料盤旋轉,下料盤是分成幾個等份、而每等份鉆有數目相同的1圓孔的圓盤,下料盤傾斜安裝,上方為待裝物品,下方是一塊刻有一個下料孔的圓板。當下料盤旋轉(伴隨有振動)時待裝物品掉人圓口,每個圓孔攜帶一個待裝物品使預定數目的待裝物品隨下料盤一起轉動,當圓孔經過下料孔時待裝物品下落到下料道,經出料口裝入容器內。這樣,下料盤的每一等份還沒有達到出料口之前就已將大等份的待裝物品經出料口裝入容器內。待等份的待裝物品全部進入容器內,擋容器汽缸收回,放走這個已經裝滿的容器,完成對該容器的灌裝流程。已經灌裝的容器離開后,當容器汽缸伸出同時進氣缸縮回,下一個容器到位,準備接下一等份的待裝物品,開始新的工作循環。
二、控制要求
自動數粒機工作流程圖如圖11-17所示,對系統的控制提出了以下要求: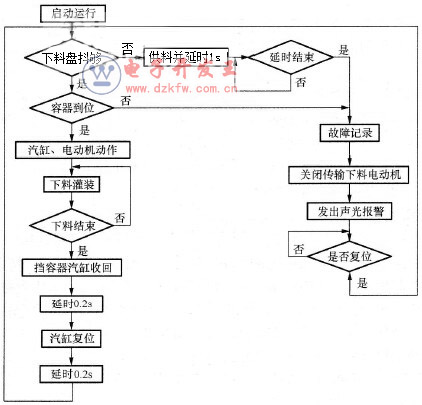
圖11-17 自動數粒機工作流程圖
(1)自動數粒機啟動后傳輸電動機運行,控制器應檢測容器是否到位和下料盤是否有足夠的待裝物品,只有這兩個條件都滿足才能啟動下料電動機。
(2)自動數粒機在運行中一旦檢測不到容器或者下料盤的待裝物品不足時,立即停車并發出聲光報警;停車后經手動復位系統才能恢復運行。
(3)為了能調節灌裝速度,自動數粒機的下料電動機采用變頻調速。傳輸電動機采用單相電動機,無需調速(自動數粒機的灌裝速度和下料速度有關,與傳輸電動機的速度無關)。
(4)由于自動數粒機的下料道較長,待裝物品經下料孔到出料口的時間較長(大約2s),為了提高灌裝速度,擋容器汽缸和進容器汽缸動作應迅速。
(5)應具有緊急停車的功能。
三、控制系統硬件設計
1.輸入/輸出信號分析
根據自動數粒機工作原理概述,可知該自動數粒機PLC控制系統的輸入信號有:檢測待裝物品是否全部進入下料道的下料傳感器1個,檢測傳送帶上是否有容器的容器傳感器1個,檢測下料盤是否需要下料的下料傳感器1個,系統啟動、停止、復位按鈕各1個,共需要6個輸入端子。
輸出信號有:控制下料電動機運行的下料繼電器1個,控制傳輸電機運行的傳輸繼電器1個,控制供料電動機運行的供料繼電器1個,控制進容器氣缸運動的進容器氣閥1個,控制擋容器氣缸運動的擋容器氣閥1個,系統運行指示燈1個,故障指示燈1個,報警蜂鳴器1個,所以共需要8個輸出端子。
2.PLC輸入/輸出分配表
根據上述對自動數粒機PLC控制系統的輸入/輸出信號分析,可設計如表11-2所示的PLC輸入/輸出地址分配表。
表11-2 PLC的輸入/輸出分配表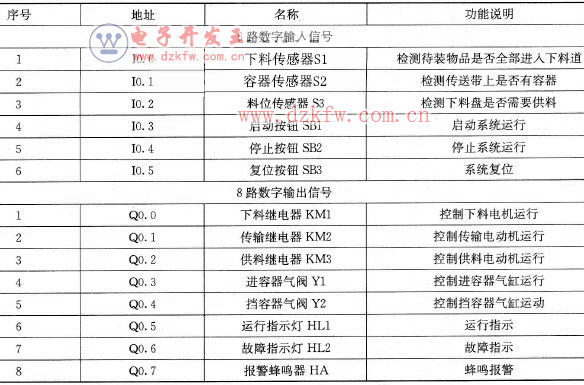
3.PLC選型
由于控制系統共需要6個輸入端子、8個輸出端子,參看表2-1,本實例中選用西門子公司的S7-200系列小型機CPU224,該型號CPU提供14個輸入點、10個輸出點,符合系統的要求。
4.PLC硬件接線圖
根據PLC的輸入/輸出分配表,可設計如圖11-18所示的PLC硬件接線圖。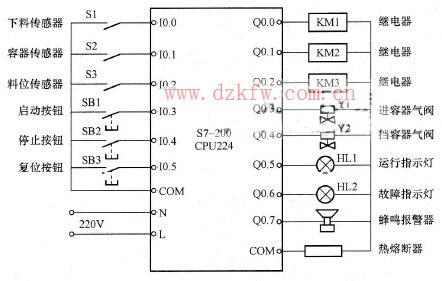
圖11-18 PLC硬件接線圖
四、PLC控制程序
自動數粒機的梯形圖如圖11-19所示,有了梯形圖后就不難寫出自動數粒機的控制程序,將其通過個人計算機編程系統輸入PLC,即可對自動數粒機進行控制。
圖11-19 自動數粒機的PLC控制梯形圖
五、總結
該自動數粒機采用光電效應原理,當藥粒下落時,通過光電傳感器產生的脈沖信號輸入到高速PLC編程控制器,再通過電路和程序的配合實現計數功能,能保證其數粒準確度。容器由輸送機連續供給,當容器中填裝的藥片數量滿足PLC編程設定的參數值時,由氣動裝置間歇換容器。該系統采用獨立的光學檢測系統,可避免由粉塵造成的影響,從而保證高水準數粒精度和速度;操作簡便,定位、換位精度高;可廣泛應用于藥品、食品、化工等行業包裝線上片劑、丸藥、軟硬膠囊、素片、糖衣片等其他形狀物料計數灌裝之用。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底