
圖1所示為串阻減壓起動和反接制動電氣控制線路,主電路中合上QF后,當主觸頭KM1, KM3閉合,則電動機串聯了電阻R開始減壓起動,到達穩定轉速后,主觸頭KM3斷開,電動機切換為正常運轉狀態。制動時主觸頭KM1斷開,KM2閉合,電動機轉子施加制動反轉轉矩,電動機接近零轉速時,主觸頭KM2斷開,撤去制動反轉轉矩,電動機停轉。

圖1:減壓起動與反接制動
二、分析
圖2所示為plc替代控制的主電路,與繼電器接觸器控制時的主電路基本保持不變,為PLC提供電源的兩路線則采用變壓器輸出。
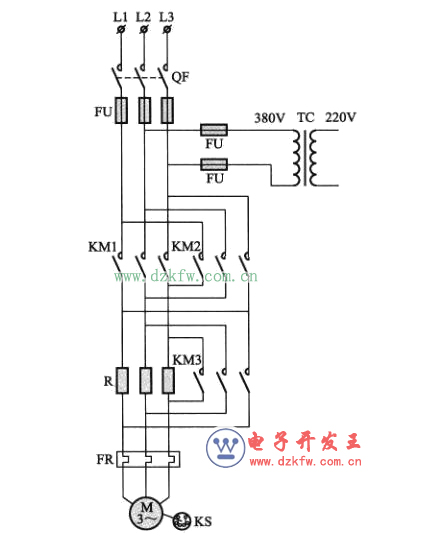
圖2:主電路
圖3所示為PLC控制的 I/0接線圖。
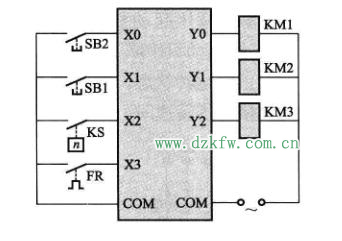
圖3:PLC的IO接線圖
圖4所示為電動機串電阻起動反接制動控制線路,按下SB2,線圈KM1通電,并通過常開輔助觸頭KM 1自鎖,主電路中電動機M通過串電阻R進行減壓起動。
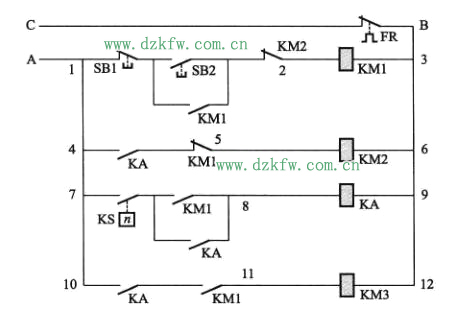
圖4:串電阻起動反接制動電路
電動機M起動后不斷升速,到達速度繼電器KS的額定轉速后將使該速度繼電器閉合,因該支路的常開觸頭KM1已閉合,所以繼電器線圈KA將閉合并通過常開輔助觸頭KA自鎖。繼電器線圈KA一旦通電,導致KM3線圈通電,主電路中形成主觸頭KM1, KM3通電,KM2斷電的狀態,電動機M全壓穩定轉動。
SB1是總停開關,按下SB1導致接觸器線圈KM1斷電,這將導致線圈KM2通電,線圈KM3斷電。主電路中因主觸頭KM1, KM3斷電.KM2通電,轉子上施加了反轉轉矩,導致電動機M快速降速。
當電動機快速降速至速度繼電器KS的額定轉速時將斷開,電動機停轉。本控制線路中,共有四個回路:
1、A——1——2——3——B——C
2、A——1——4——5——6——B——C
3、A——1——7——8——9——B——C
4、A——1——10——11——12——B——C
三、程序
圖5所示為根據逐行回路轉換法得到的初步轉換梯形圖,該圖直接將四個回路轉換為一個四行的梯形圖,但初步轉換梯形圖還須根據梯形圖若干繪制原則進行合理修改。

圖5:初步轉換梯形圖
梯形圖修正規則如下:
1、接入常開型輸人電氣元件時,梯形圖與電氣控制圖中各觸頭形式一致。
當PLC的 I 口接入常開按鈕或常開觸頭時,與之對應的PLC內部編程元件與繼電器接觸器控制線路中按鈕或觸頭的常開、常閉形式完全一致。
如果圖4中 I 口接入常開按鈕SB1,則梯形圖第1支路中對應的編程元件習為常閉觸頭,
繼電器接觸器控制線路中,A——1——2——3——B——C 回路中SB1也是常閉觸頭形式,兩者完全一致。
反之,如果PLC的 I 口接人SB1常閉按鈕,則因繼電器接觸器控制線路的A-1-2-3-B-C回路中SB1是常閉形式,轉換為梯形圖時,第1支路中對應的編程元件X1就應為常開觸頭,兩者觸頭形式剛好相反。
2、觸頭不直接與右母線相連,線圈不直接與左母線相連。
梯形圖每一行從左母線開始并終止于右母線,觸頭不能與右母線直接相連,線圈不能與左母線直接相連。www.zhimadaxue.com版權所有!圖5中第1, 3, 4, 6支路中的常閉觸頭X3直接接在了右母線上,因與各自的線圈互換位置,才能符合“觸頭不接右母線”的規則。
3、較多串聯觸頭支路置于上,較多并聯觸頭回路置于左。 在一條梯形圖支路中,幾個觸頭并聯的回路應置于左母線端,并聯觸頭越多,回路位置越靠左;支路與支路之間,串聯觸頭多的支路應置于梯形圖上部位置,例圖5中,第1,2,4,5支路的并聯回路按本規則應置于梯形圖的左母線處。
4、受線圈控制的觸頭所在支路置于線圈支路之后。
圖5中第3支路的TO觸頭受第5支路線圈TO控制,應將第3支路置于線圈TO所在支路(第5支路)之后,才能使梯形圖邏輯清晰,容易讀懂。
5、同一編號線圈不重復,一條支路中多個線圈可并聯輸出。
同一編號的線圈在一個程序中使用兩次稱為重復線圈輸出,極易引起誤操作,應盡量避免使用,而且一條支路中的兩個或兩個以上不同編號的線圈,則可以采用并聯的方式輸出,但不能串聯。
根據上述規則修正后的梯形圖如圖6所示。此外,梯形圖還應根據梯形圖簡化規則進行化簡,以提高PLC程序的簡潔性與執行效率,例圖6中第3, 5支路中的常閉觸頭X3可根據后述的簡化規則省略。

圖6:修改后的梯形圖
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底