
PLC控制在三相異步電動(dòng)機(jī)的星/三角換接啟動(dòng)控制實(shí)驗(yàn)區(qū)完成本實(shí)驗(yàn)
注意:(本實(shí)驗(yàn)只能在實(shí)驗(yàn)臺(tái)上完成),由于電機(jī)正反轉(zhuǎn)換接時(shí),有可能因?yàn)殡妱?dòng)機(jī)容量較大或操作不當(dāng)?shù)仍颍菇佑|器主觸頭產(chǎn)生較為嚴(yán)重的起弧現(xiàn)象,如果電弧還未完全熄滅時(shí),反轉(zhuǎn)的接觸器就閉合,則會(huì)造成電源相間短路。用PLC來控制電機(jī)則可避免這一問題。
實(shí)驗(yàn)?zāi)康?/SPAN>
1、 掌握電機(jī)星/三角換接啟動(dòng)主回路的接線。
2、 學(xué)會(huì)用可編程控制器實(shí)現(xiàn)電機(jī)星/三角換接降壓啟動(dòng)過程的編程方法。
實(shí)驗(yàn)要求
合上啟動(dòng)按鈕后,電機(jī)先作星形連接啟動(dòng),經(jīng)延時(shí)6秒后自動(dòng)換接到三角形連接運(yùn)轉(zhuǎn)。
三相異步電動(dòng)機(jī)星/三角換接啟動(dòng)控制的實(shí)驗(yàn)面板圖:圖6-3-1所示
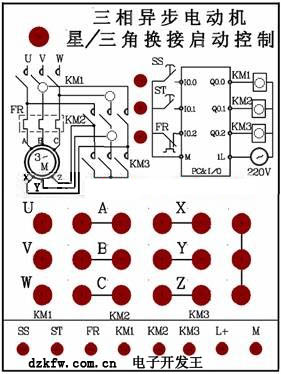
上圖下框中的SS、ST、FR分別接主機(jī)的輸入點(diǎn)I0.0、I0.1、I0.2;將KM1、KM2、KM3分別接主機(jī)的輸出點(diǎn)Q0.1、Q0.2、Q0.3;COM端與主機(jī)的1L端相連;本實(shí)驗(yàn)區(qū)的+24V端與主機(jī)的L+端相連。KM1、KM2、KM3的動(dòng)作用發(fā)光二極管來模擬。
實(shí)驗(yàn)裝置已將三個(gè)CJ0-10接觸器的觸點(diǎn)引出至面板上。學(xué)生可按圖示的粗線,用專用實(shí)驗(yàn)連接導(dǎo)線連接。380V電壓已引至三相開關(guān)SQ的U、V、W端。A、B、C、X、Y、Z與三相異步電動(dòng)機(jī)(400W)的相應(yīng)六個(gè)接線柱相連。將三相閘刀開關(guān)撥向“開”位置,三相380V電即引至U/、V/、W/三端。
注意:接通電源之前,將三相異步電動(dòng)機(jī)的星/三角換接啟動(dòng)實(shí)驗(yàn)?zāi)K的開關(guān)置于“關(guān)”位置(開關(guān)往下扳)。因?yàn)橐坏┙油ㄈ嚯姡灰_關(guān)置于“開”位置(開關(guān)往上扳),這一實(shí)驗(yàn)?zāi)K中的U、V、W端就已得電。所以,請(qǐng)?jiān)谶B好實(shí)驗(yàn)接線后,才將這一開關(guān)接通,請(qǐng)千萬注意人身安全。
四、編制梯形圖并寫出程序
實(shí)驗(yàn)參考程序表6-3-1所示
|
步序 |
指 令 |
步序 |
指 令 |
|
0 |
LD I0.0 |
10 |
LD T47 |
|
1 |
O M10.0 |
11 |
AN T37 |
|
2 |
AN I0.1 停止 |
12 |
AN Q0.2 |
|
3 |
AN I0.2 過載保護(hù) |
13 |
= Q0.3 KM3吸合 |
|
4 |
= M10.0 |
14 |
LD T37 |
|
5 |
= Q0.1 KM1吸合 |
15 |
TON T38, +5 |
|
6 |
LD M10.0 |
16 |
LD T38 |
|
7 |
TON T37, +60 延時(shí)6S |
17 |
AN Q0.3 |
|
8 |
LD M10.0 |
18 |
= Q0.2 KM2吸合 |
|
9 |
TON T47, +10 延時(shí)1S |
|
|
五、動(dòng)作過程分析
啟動(dòng):按啟動(dòng)按鈕SS,I0.0的動(dòng)合觸點(diǎn)閉合,M10.0線圈得電,M10.0的動(dòng)合觸點(diǎn)閉合,Q0.1線圈得電,即接觸器KM1的線圈得電,1秒后Q0.3線圈得電,即接觸器KM3的線圈得電,電動(dòng)機(jī)作星形連接啟動(dòng);同時(shí)定時(shí)器線圈T37得電,當(dāng)啟動(dòng)時(shí)間累計(jì)達(dá)6秒時(shí),T37的動(dòng)斷觸點(diǎn)斷開,Q0.3失電,接觸器KM3斷電,觸頭釋放,與此同時(shí)T37的動(dòng)合觸點(diǎn)閉合,T38得電,經(jīng)0.5秒后,T38動(dòng)合觸點(diǎn)閉合,Q0.2線圈得電,電動(dòng)機(jī)接成三角形,啟動(dòng)完畢。定時(shí)器T1的作用使KM3斷開0.5秒后KM2才得電,避免電源短路。
停車:按停止按鈕ST,I0.1的動(dòng)斷觸點(diǎn)斷開,M10.0、T37失電;M10.0、T37的動(dòng)合觸點(diǎn)斷開,Q0.1、Q0.3失電。KM1、KM3斷電,電動(dòng)機(jī)作自由停車運(yùn)行。
過載保護(hù):當(dāng)電動(dòng)機(jī)過載時(shí),I0.2的動(dòng)斷觸點(diǎn)斷開,Q0.1、Q0.3失電,電動(dòng)機(jī)也停車。按一下按鈕FR,可模擬過載,觀察運(yùn)行結(jié)果
六、 實(shí)驗(yàn)設(shè)備
1、THSMS-A型、THSMS-B型實(shí)驗(yàn)裝置一臺(tái)
2、安裝了STEP7-Micro/WIN32編程軟件的計(jì)算機(jī)一臺(tái)
3、PC/PPI編程電纜一根
4、鎖緊導(dǎo)線若干
七、預(yù)習(xí)要求
閱讀實(shí)驗(yàn)指導(dǎo)書,復(fù)習(xí)教材中有關(guān)的內(nèi)容。
報(bào)告要求
整理出運(yùn)行和監(jiān)視程序時(shí)出現(xiàn)的現(xiàn)象。
梯形圖如下圖所示: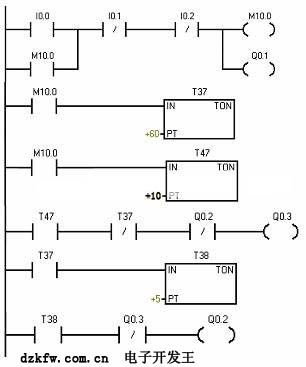
參考梯形圖如圖6-3-2所示
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底