
╠½Ļ¢─▄╩Ūęčų¬Ą─ūŅįŁ╩╝Ą──▄į┤Ż¼╦³Ė╔ā¶Īó┐╔į┘╔·ĪóžSĖ╗Ż¼Č°ŪęĘų▓╝ĘČć·ÅVŻ¼Š▀ėąĘŪ│ŻÅVķ¤Ą─└¹ė├Ū░Š░ĪŻĄ½╠½Ļ¢─▄└¹ė├ą¦┬╩Ą═Ż¼▀@ę╗å¢Ņ}ę╗ų▒ė░Ēæ║═ūĶĄKų°╠½Ļ¢─▄╝╝ągĄ─Ųš╝░Ż¼╚ń║╬╠ßĖ▀╠½Ļ¢─▄└¹ė├čbų├Ą─ą¦┬╩Ż¼╩╝ĮK╩Ū╚╦éāĻPą─Ą─įÆŅ}Ż¼╠½Ļ¢─▄ūįäėĖ·█ÖŽĄĮyĄ─įOėŗ×ķĮŌøQ▀@ę╗å¢Ņ}╠ß╣®┴╦ą┬═ŠÅĮŻ¼Å─Č°┤¾┤¾╠ßĖ▀┴╦╠½Ļ¢─▄Ą─└¹ė├ą¦┬╩ĪŻ
Ė·█Ö╠½Ļ¢Ą─ĘĮĘ©┐╔Ė┼└©×ķā╔ĘNĘĮ╩ĮŻ║╣ŌļŖĖ·█Ö║═Ė∙ō■ęĢ╚š▀\äė▄ē█EĖ·█ÖĪŻ╣ŌļŖĖ·█Ö╩Ūė╔╣ŌļŖé„ĖąŲ„╝■Ė∙ō■╚ļ╔õ╣ŌŠĆĄ─ÅŖ╚§ūā╗»«a╔·Ę┤üą┼╠¢ĄĮėŗ╦ŃÖCŻ¼ėŗ╦ŃÖC▀\ąą│╠ą“š{š¹▓╔╣Ō░ÕĄ─ĮŪČ╚īŹ¼Fī”╠½Ļ¢Ą─Ė·█ÖĪŻ╣ŌļŖĖ·█ÖĄ─ā׳c╩Ūņ`├¶Č╚Ė▀Ż¼ĮYśŗįOėŗ▌^×ķĘĮ▒Ń;╚▒³c╩Ū╩▄╠ņÜŌĄ─ė░Ēæ║▄┤¾Ż¼╚ń╣¹į┌╔įķLĢrķgČ╬└’│÷¼FקįŲš┌ūĪ╠½Ļ¢Ą─ŪķørŻ¼Ģ■ī¦ų┬Ė·█Öčbų├¤oĘ©Ė·█Ö╠½Ļ¢Ż¼╔§ų┴ę²Ųł╠ąąÖCśŗĄ─š`äėū„ĪŻ
Č°ęĢ╚š▀\äė▄ē█EĖ·█ÖĄ─ā׳c╩Ū─▄ē“╚½╠ņ║“īŹĢrĖ·█ÖŻ¼╦∙ęį▒ŠįOėŗ▓╔ė├ęĢ╚š▀\äė▄ē█EĖ·█ÖĘĮĘ©║═ļp▌SĖ·█ÖĄ─▐kĘ©Ż¼└¹ė├▓Į▀MļŖÖCļp▌S“īäėŻ¼═©▀^ī”Ė·█ÖÖCśŗ▀Mąą╦«ŲĮĪóĖ®č÷ā╔éĆūįė╔Č╚Ą─┐žųŲŻ¼īŹ¼Fī”╠½Ļ¢Ą─╚½╠ņ║“Ė·█ÖĪŻįōŽĄĮy▀mė├ė┌Ė„ĘNąĶę¬Ė·█Ö╠½Ļ¢Ą─čbų├ĪŻįō╬─ų„ę¬Å─ė▓╝■║═▄ø╝■ĘĮ├µĘų╬÷╠½Ļ¢ūįäėĖ·█ÖŽĄĮyĄ─įOėŗ┼cīŹ¼FĪŻ
ŽĄĮy┐é¾wįOėŗ
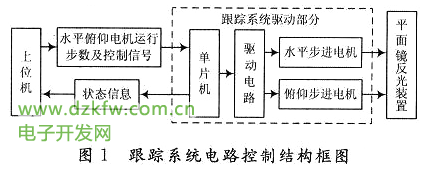
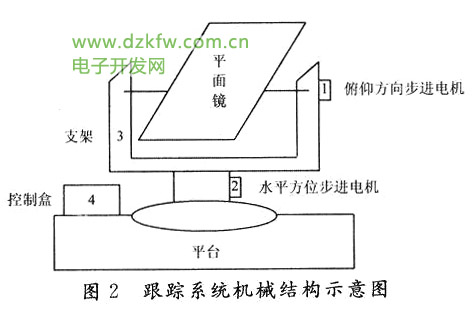
▒Š╬─ĮķĮBĄ─╩Ūę╗ĘN╗∙ė┌å╬Ų¼ÖC┐žųŲĄ─ļp▌S╠½Ļ¢ūįäėĖ·█ÖŽĄĮyŻ¼ŽĄĮyų„ę¬ė╔ŲĮ├µńRĘ┤╣Ōčbų├Īóš{š¹ł╠ąąÖCśŗĪó┐žųŲļŖ┬ĘĪóĘĮ╬╗Ž▐╬╗ļŖ┬ĘĄ╚▓┐ĘųĮM│╔ĪŻĖ·█ÖŽĄĮyļŖ┬Ę┐žųŲĮYśŗ┐“łD╚ńłD1╦∙╩ŠŻ¼ŽĄĮyÖCąĄĮYśŗ╩ŠęŌłD╚ńłD2╦∙╩ŠĪŻ
╚╬ęŌĢr┐╠╠½Ļ¢Ą─╬╗ų├┐╔ęįė├╠½Ļ¢ęĢ╬╗ų├Š½┤_▒Ē╩ŠĪŻ╠½Ļ¢ęĢ╬╗ų├ė├╠½Ļ¢Ė▀Č╚ĮŪ║═╠½Ļ¢ĘĮ╬╗ĮŪā╔éĆĮŪČ╚ū„×ķū°ś╦▒Ē╩ŠĪŻ╠½Ļ¢Ė▀Č╚ĮŪųĖÅ─╠½Ļ¢ųąą─ų▒╔õĄĮ«öĄžĄ─╣ŌŠĆ┼c«öĄž╦«ŲĮ├µĄ─ŖAĮŪĪŻ╠½Ļ¢ĘĮ╬╗ĮŪ╝┤╠½Ļ¢╦∙į┌Ą─ĘĮ╬╗Ż¼ųĖ╠½Ļ¢╣ŌŠĆį┌ĄžŲĮ├µ╔ŽĄ─═Čė░┼c«öĄžūė╬ńŠĆĄ─ŖAĮŪŻ¼┐╔Į³╦ŲĄž┐┤ū„╩ŪžQ┴óį┌Ąž├µ╔ŽĄ─ų▒ŠĆį┌Ļ¢╣ŌŽ┬Ą─ĻÄė░┼cš²─ŽĘĮĄ─ŖAĮŪĪŻŽĄĮy▓╔ė├╦«ŲĮĘĮ╬╗▓Į▀MļŖÖC║═Ė®č÷ĘĮŽ“▓Į▀MļŖÖCüĒūĘ█Ö╠½Ļ¢Ą─ĘĮ╬╗ĮŪ║═Ė▀Č╚ĮŪŻ¼Å─Č°┐╔ęįīŹĢrŠ½┤_ūĘ█Ö╠½Ļ¢Ą─╬╗ų├ĪŻ╔Ž╬╗ÖCžōž¤╚╬ęŌĢr┐╠╠½Ļ¢Ė▀Č╚ĮŪ║═ĘĮ╬╗ĮŪĄ─ėŗ╦ŃŻ¼▓ó▀\ė├▄ø╝■ėŗ╦Ń│÷«öŪ░ĀŅørŽ┬Ė®č÷┼c╦«ŲĮĘĮŽ“Ą─▓Į▀MļŖäėÖC▀\ąąĄ─▓ĮöĄŻ¼īóöĄō■╦═ĮoĖ·█ÖŽĄĮy“īäėŲ„Ż¼å╬Ų¼ÖCĮė╩š╔Ž╬╗ÖC╦═üĒĄ─öĄō■Ż¼“īäė▓Į▀MļŖÖCĄ─▀\ąąĪŻŽĄĮyŠ▀ėąīŹ¼FÅ═╬╗Īó╦«ŲĮĘĮ╬╗Ą─š{š¹Ż¼Ė®č÷ĘĮŽ“Ą─š{š¹Ż¼╠½Ļ¢Ą─Ė·█Ö╝░╩ųäėąŻ£╩Ą╚╣”─▄ĪŻ
ė▓╝■ļŖ┬ĘįOėŗ
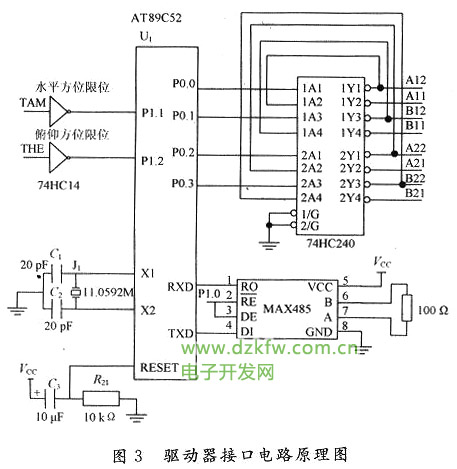
1ĪĪĖ·█ÖŽĄĮy“īäėŲ„Įė┐┌ļŖ┬Ę
Ė·█ÖŽĄĮyųą╬ó╠Ä└ĒŲ„▀xė├89ŽĄ┴ąąįār▒╚Ė▀║═╣”║─Ą═Ą─89C52ĪŻ74HC14ąŠŲ¼╩Ū6ĘŪķT╩®├▄╠žė|░lŲ„Ż¼┼cP1.1║═P1.2┐┌ŽÓ▀BŻ¼┐žųŲĘĮ╬╗Ž▐╬╗ą┼╠¢ĪŻ74HC240ąŠŲ¼Ż¼░╦Ę┤ŽÓ╚²æBŠÅø_Ų„/ŠĆ“īäėŲ„Ż¼ė├ė┌öĄō■ŠÅø_╝░┐éŠĆ“īäėĪŻŽĄĮy╩╣ė├ā╔Ų¼74HC240ąŠŲ¼Ż¼═©▀^P0┐┌ę²─_┐žųŲŻ¼ā╔Ų¼74HC240Ą─16éĆ▌ö│÷ę²─_ū„×ķ▓Į▀MļŖÖC“īäėļŖ┬ĘĄ─▌ö╚ļ┐žųŲą┼╠¢Ż¼Ęųäe┐žųŲ▓Į▀MļŖÖCĖ®č÷ĘĮŽ“║═╦«ŲĮĘĮ╬╗Ą─š²Ę┤▐DĪŻŽĄĮy┼c╔Ž╬╗ÖCĄ─═©ą┼▀xė├MAX485Įė┐┌ąŠŲ¼Ż¼ė╔P1.0┐┌┐žųŲŲõ╩š░lĀŅæBĪŻ“īäėŲ„Įė┐┌ļŖ┬Ę╚ńłD3╦∙╩ŠĪŻ
2ĪĪ▓Į▀MļŖÖC“īäėļŖ┬Ę
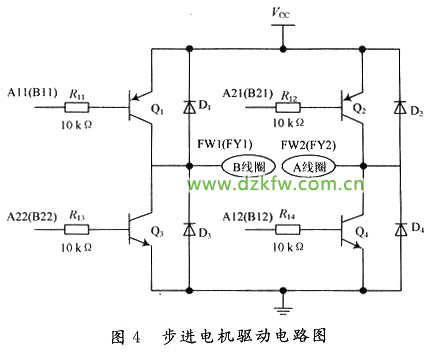
▓Į▀MļŖäėÖC╩Ūę╗ĘNė├ļŖ├}ø_ą┼╠¢▀Mąą┐žųŲŻ¼▓óīóļŖ├}ø_ą┼╠¢▐DōQ│╔ŽÓæ¬ĮŪ╬╗ęŲĄ─ł╠ąąŲ„ĪŻį┌Ė·█ÖŽĄĮyųąŻ¼ęį74HC240Ą─16éĆ▌ö│÷ą┼╠¢ū„×ķ▓Į▀MļŖÖC“īäėŲ„Ą─▌ö╚ļ┐žųŲą┼╠¢Ż¼ė├ęį┐žųŲ▓Į▀MļŖÖCĖ®č÷ĘĮŽ“║═╦«ŲĮĘĮ╬╗Ą─š²Ę┤▐DĪŻłD4╦∙╩ŠĄ─╩Ū▓Į▀MļŖÖCę╗┬Ę“īäėļŖ┬ĘłDŻ¼ŽĄĮy╣▓ėą╦─┬Ę“īäėļŖ┬ĘŻ¼Ęųäe“īäė▓Į▀MļŖÖCĖ®č÷ĘĮŽ“║═╦«ŲĮĘĮ╬╗Ą─š²Ę┤▐DĪŻ
ŲõųąŻ¼╦«ŲĮĘĮ╬╗ļŖÖCė╔D7Ż¼D6Ż¼D5Ż¼D4“īäė;Ė®č÷ĘĮŽ“ļŖÖCė╔D3Ż¼D2Ż¼D1Ż¼D0“īäėĪŻĖ·█Öčbų├ųą▓Į▀MļŖÖC▀xė├42BYG250Cą═Ż¼▓ĮŠžĮŪ1.8ĪŃĪŻ╦«ŲĮĖ®č÷ĘĮŽ“▓Į▀MļŖÖC▀\ąąĄ─ūŅ┤¾ĮŪČ╚╩Ū360ĪŃŻ¼╣▓ąĶ▀\ąą20000▓ĮĪŻ£p╦┘Ų„Ą─é„äė▒╚×ķ1Ż║100Ż¼╝┤ļŖÖC▐Däė100ĪŃĢr╦«ŲĮ▐D┼_ŽÓæ¬▐Däė1ĪŃĪŻęį▓Į▀MļŖÖC1.8ĪŃĄ─▓ĮŠÓĮŪėŗ╦ŃŻ¼«öńR├µčbų├Ą─╦«ŲĮ▐D┼_▐Däė1ĪŃĢrŻ¼▓Į▀MļŖÖC░l│÷100/1.8éĆ├}ø_Ż¼ė╔┤╦┐╔ęįėŗ╦ŃŲĮ├µńRĘ©Ž“┴┐Ą─ĘĮ╬╗ĮŪ×ķaĢr▓Į▀MļŖÖC░l│÷Ą─├}ø_öĄ×ķ100”┴/1.8éĆĪŻ▓Į▀MļŖÖCäėū„Ņl┬╩┐╔╩ųäėįOų├Ż¼─¼šJŪķørŽ┬Ż¼▓Į▀MļŖÖC├┐Ė¶15säėū„ę╗┤╬ĪŻ
3ĪĪŽ▐╬╗ą┼╠¢▓╔╝»ļŖ┬Ę
▓╔ė├╣ŌļŖ±Ņ║ŽŲ„┼cļŖē║▒╚▌^Ų„ļŖ┬ĘĮM│╔Ą─╬óÖC▓Į▀MļŖÖCŽ▐╬╗ļŖ┬ĘŻ¼ŲõļŖ┬ĘłD╚ńłD5╦∙╩ŠĪŻ
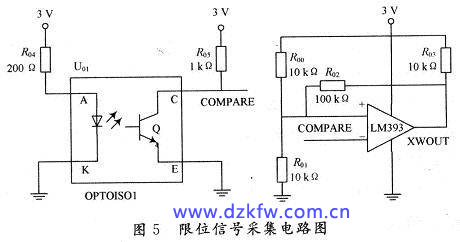
Ž▐╬╗ļŖ┬Ęųą└¹ė├ļp╚²æBķTüĒ┐žųŲ▓Į▀MļŖÖCĄ─├}ø_═©┬ĘĪŻ╣żū„įŁ└Ē╩ŪŻ║į┌ĄĮ▀_Ž▐╬╗╬╗ų├ų«Ū░Ż¼╣Ō±Ņī¦═©Ż¼ļŖē║▒╚▌^Ų„LM393Ą─Ę┤Ž“▌ö╚ļČ╦ėąą┼╠¢Ż¼į╩įS▓Į▀MļŖÖC┐žųŲ├}ø_Å─┤╦═©▀^ĪŻ«öŽ▐╬╗ŚUĄĮ▀_Ž▐╬╗╬╗ų├ĢrŻ¼ō§ūĪ┴╦╣Ō±ŅĄ─╣Ō═©┬ĘŻ¼╩╣LM393Ą─Ę┤Ž“▌ö╚ļČ╦¤oą┼╠¢Ż¼▓Į▀MļŖÖCŠ══Żų╣ĪŻ
▄ø╝■įOėŗ
╠½Ļ¢ūįäėĖ·█ÖŽĄĮyĄ─▄ø╝■Ęų×ķā╔▓┐ĘųŻ¼ę╗╩Ū▓Į▀MļŖÖC┐žųŲ▓┐ĘųŻ¼ų„ę¬ė╔å╬Ų¼ÖC═Ļ│╔ĪŻå╬Ų¼ÖCĄ─▄ø╝■įOėŗ▓╔ė├─ŻēK╗»įOėŗĄ─ĘĮĘ©Ż¼ų„ę¬Ęų×ķ╚ńŽ┬ÄūéĆ▄ø╝■─ŻēKŻ║ų„│╠ą“─ŻēKĪó┤«ąą┐┌ųąöÓ╠Ä└Ē─ŻēKĪóš²│ŻĖ·█Ö╠Ä└Ē─ŻēKĪó┤«ąą┐┌ųąöÓÅ═╬╗╠Ä└Ē─ŻēKĄ╚ĪŻå╬Ų¼ÖCų„│╠ą“┴„│╠łD╚ńłD6╦∙╩ŠĪŻ
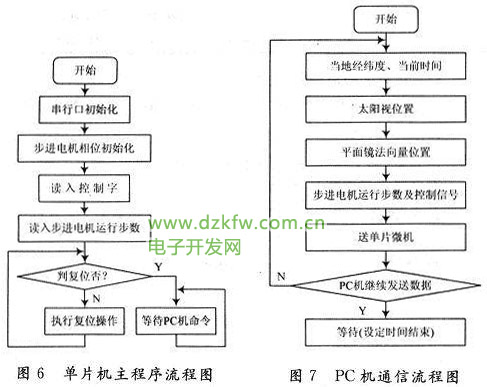
▄ø╝■Ą─┴Ēę╗▓┐Ęų×ķPCÖC▓┐ĘųŻ¼PCÖC▄ø╝■▓┐Ęųų„ę¬╩Ūžōž¤╚╬ęŌĢr┐╠╠½Ļ¢╬╗ų├Ą─ėŗ╦Ń▓ó▀\ė├▄ø╝■ėŗ╦Ń│÷«öŪ░ĀŅørŽ┬Ė®č÷┼c╦«ŲĮĘĮŽ“▓Į▀MļŖÖC▀\ąąĄ─▓ĮöĄŻ¼▓óīóöĄō■╦═ĮoĖ·█ÖŽĄĮy“īäėŲ„ĪŻ┼cå╬Ų¼ÖC═©ą┼Ą─▓┐Ęų╩╣ė├VC++ųąĄ─MSComm┐ž╝■üĒŠÄūg┤«┐┌═©ėŹĄ─æ¬ė├│╠ą“Ż¼▓╔ė├MSComm32.OCX┐ž╝■ĪŻ╩╣ė├┐ž╝■Ą─ī┘ąį▀Mąą┤«┐┌įOų├Ż¼╩╣ė├┐ž╝■Ą─╩┬╝■“īäė▀Mąą┤«┐┌Ēææ¬Ż¼╩╣ė├┐ž╝■Ą─ĘĮĘ©═Ļ│╔┤«ąą┐┌Įė╩š║═░l╦═öĄō■ĪŻPCÖC═©ą┼┴„│╠łD╚ńłD7╦∙╩ŠĪŻ
╔Ž╬╗ÖC┐žųŲŽĄĮyŠ▀ėąīŹ¼FÅ═╬╗Īó╦«ŲĮĘĮ╬╗Ą─š{š¹Ż¼Ė®č÷ĘĮŽ“Ą─š{š¹Ż¼╠½Ļ¢╬╗ų├Ą─Ė·█ÖĪó╩ųäėąŻ£╩╝░ėŗ╦Ń«ö╚šöĄō■Ą╚╣”─▄ĪŻŲõųąĪ░įOų├Ī▒░┤ŌoŻ¼┐╔▀MąąĄžĘĮĮøŠĢČ╚Īó▓©╠ž┬╩Īó▓Į▀MļŖÖCäėū„Ņl┬╩Ą╚Ą─įOų├ĪŻ╔Ž╬╗ÖC┐╔ł╠ąą│╠ą“┐žųŲĮń├µ╚ńłD8╦∙╩ŠŻ¼łD9╦∙╩ŠĄ─╩Ū┐žųŲų„Įń├µŽ┬Ī░įOų├Ī▒░┤ŌoĄ─ī”įÆ┐“ĪŻ
įć“×ė^▓ņöĄō■Ęų╬÷
ė╔ė┌ė░ĒæĖ·█ÖŠ½Č╚Ą─ę“╦ž║▄ČÓŻ¼▓╗āHĖ·«öĄžŠĢČ╚Īó╠½Ļ¢│ÓŠĢĮŪĪó╠½Ļ¢ĢrĮŪĄ─╚ĪųĄėąĻPŻ¼▀ĆĖ·▓Į▀MļŖÖCĄ─Š½Č╚ęį╝░Ė·█Ö▐D┼_Ą─ÖCąĄĮYśŗėąĻPŻ¼ę“Č°ąĶę¬ī”Ė·█Ö▄ē█EĄ─│╠ą“▀MąąąŻš²ĪŻąŻš²▓╔ė├╩ųäė▓┘ū„Ż¼═©▀^┐žųŲ╦«ŲĮĖ®č÷ĘĮ╬╗▓Į▀MļŖÖCŻ¼╩╣ā╔éĆ▌SĦäėŲĮ├µńRĘ┤╣Ōčbų├▐DäėŻ¼═¼Ģr▓╗öÓė^▓ņŲĮ├µńRĘ┤╔õ╠½Ļ¢╣ŌĄ─ė░ūėŻ¼«öė░ūėųąą─äé║├Š█į┌ųĖČ©³cĢr×ķūŅ╝čŻ¼ėøõøŽ┬Å─įŁ³cĄĮįō³cā╔▌SĄ─▓Į▀MļŖÖCĖ„ūįū▀▀^Ą─▓ĮöĄŻ¼Ė∙ō■īŹļH▀\ąą▓ĮöĄ┼c└Ēšō▀\ąą▓ĮöĄų«▓ŅŻ¼┐╔ėŗ╦ŃĄ├ĄĮĮŪČ╚ų«▓ŅŻ¼Š═╩ŪĖ▀Č╚ĮŪ║═ĘĮ╬╗ĮŪĄ─ą▐š²ųĄĪŻąŻš²┐╔ęį▀xō±╚╬ę╗╠ņųąÄūéĆ▓╗═¼Ģr┐╠▀MąąĪŻŽĄĮyį┌īŹļH▀\ąąĢrŻ¼ė^▓ņĄĮ╠½Ļ¢į┌š²╬ńų┴Ž┬╬ń3³cŲ┌ķgŻ¼Ė▀Č╚ĮŪĘĮ╬╗ĮŪūā╗»Ū·ŠĆ┤µį┌├„’@╣š³cŻ¼ūā╗»▒╚▌^’@ų°Ż¼į┌┤╦Ų┌ķgā╚ŽĄĮyī”╠½Ļ¢╬╗ų├Ą─Ė·█Ö┤µį┌š`▓ŅĪŻ
▒Ē1ųą┴ą│÷┴╦2009─Ļ1į┬12╚šųą╬ńų┴Ž┬╬ń╚²Ģrū¾ėęĄ─└ĒšōöĄō■Ż¼▓óė├ŽĄĮyĄ─╩ųäėąŻ£╩╣”─▄Ż¼ėøõøŽ┬▓╗═¼Ģr┐╠Ą─▓Į▀MļŖÖCīŹļH▀\ąą▓ĮöĄĪŻ
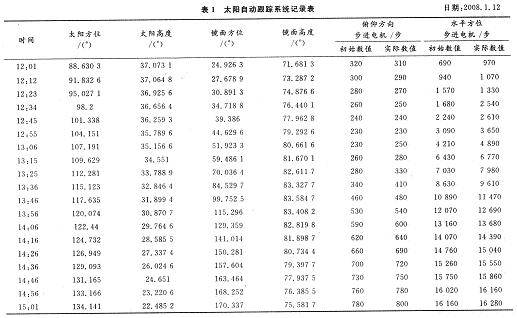
×ķ┴╦Ė³£╩┤_ĄžĄ├ĄĮ╠½Ļ¢īŹļH╬╗ų├Ą─ģóöĄą▐š²ųĄŻ¼æ¬į┌┤║Ž─Ū’Č¼╦─╝Šųą▓╗═¼Ģr┐╠Ęųäeė^£yėøõøöĄō■Ż¼īóĄ├ĄĮĄ─ę╗ĮMĖ▀Č╚ĮŪ║═ĘĮ╬╗ĮŪĄ─ąŻš²ųĄŻ¼öM║ŽŲõŪ·ŠĆĪŻė├ąŻš²ŽĄöĄąŻš²└ĒšōųĄ┤µ╚ļ┐žųŲ│╠ą“Ż¼┐╔ęį╠ßĖ▀Ė·█ÖŠ½Č╚ĪŻ
▒Š╬─ĮķĮBĄ─╠½Ļ¢ūįäėĖ·█Öčbų├┐╔ęįėąą¦Ąž╠ßĖ▀╠½Ļ¢─▄└¹ė├┬╩Ż¼▀mė├ė┌Ė„ĘNąĶę¬Ė·█Ö╠½Ļ¢Ą─čbų├ĪŻĮø▀^įć“×Īó£yįć║═īŹļH╩╣ė├Ż¼Ė„ĒŚųĖś╦Š∙▀_ĄĮ┴╦įOėŗę¬Ū¾ĪŻ▒Š╬─įOėŗĄ─╠½Ļ¢ūįäėĖ·█Öčbų├╩Ū╗∙ė┌ęĢ╚š▀\äėęÄ┬╔Ż¼×ķ╩╣ŽĄĮyŠ▀ėąĖ³Ė▀Ą─Ė·█ÖŠ½Č╚Ż¼┐╔▓╔ė├╣ŌļŖé„ĖąŲ„Ė·█ÖąŻš²Ż¼śŗ│╔ė╔ęĢ╚š▀\äėęÄ┬╔Ė·█Ö║═é„ĖąŲ„Ė·█ÖĄ─╗ņ║ŽĖ·█ÖŽĄĮyĪŻļSų°╠½Ļ¢─▄ūįäėĖ·█Öčbų├Ą─ÅVĘ║æ¬ė├Ż¼╦³Č©Ģ■ėąų·ė┌╠ßĖ▀ŠG╔½─▄į┤└¹ė├Ą─▀M│╠Ż¼×ķŁhŠ│▒Żūo║═╠ßĖ▀╚╦├±Ą─╔·╗Ņ┘|┴┐ū÷│÷Ė³┤¾Ą─žĢ½IĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū